一种用于临近空间目标跟踪的过程噪声自适应调节方法
本发明涉及临近空间目标跟踪,具体涉及一种用于临近空间目标跟踪的过程噪声自适应调节方法。
背景技术:
1、临近空间高超声速滑翔飞行器的飞行高度在20~100km左右,飞行速度一般大于5ma。由于临近空间飞行器飞行高度较低,可利用气动力进行大范围机动,因而导致现有目标探测系统难以对其进行有效跟踪。
2、由于临近空间目标机动未知,跟踪滤波器所使用的目标运动模型与目标真实运动存在模型误差,可能导致跟踪误差发散。引入过程噪声可以有效避免模型误差导致的滤波器发散,这是因为过程噪声大小可以控制基于运动模型的状态预测值在滤波更新中的权重。当运动模型不准,但过程噪声较小时,滤波会发散。当运动模型准确,但过程噪声较大时,会降低跟踪精度。因而,过程噪声大小的自适应调节对于保证跟踪性能十分关键。
3、临近空间飞行器的模型误差大小受多种因素影响,其中气动加速度误差的影响最为显著,而气动加速度主要由动压和气动系数决定。因此,本发明提出一种用于临近空间目标跟踪的过程噪声自适应调节方法,用于提升临近空间目标的跟踪精度。
技术实现思路
1、本发明目的在于提供一种用于临近空间目标跟踪的过程噪声自适应调节方法,旨在利用动压估计值对过程噪声大小进行调节,以现实对飞行器的高精度定位,具体技术方案如下:
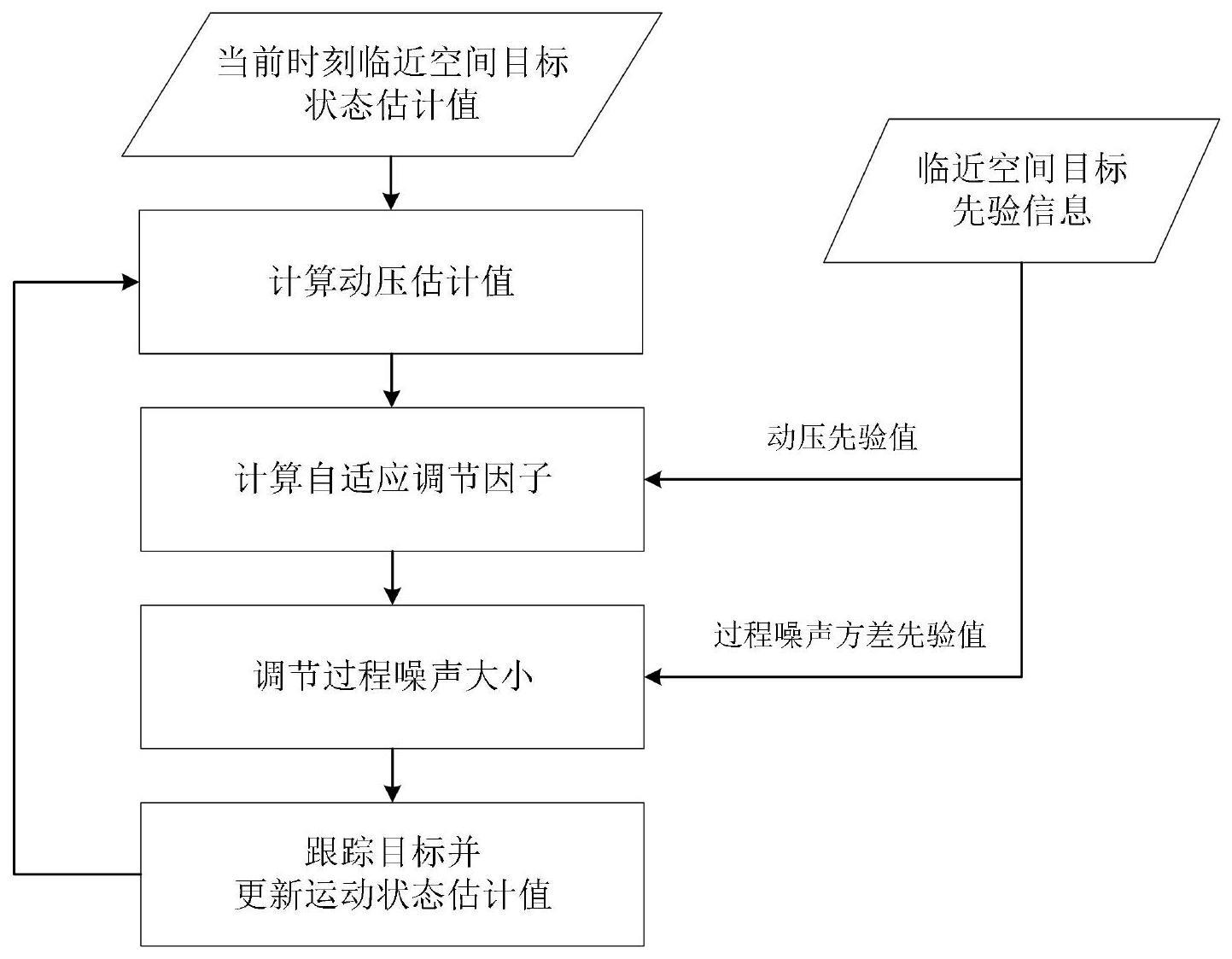
2、一种用于临近空间目标跟踪的过程噪声自适应调节方法,包括以下步骤:
3、s1、构建基于气动参数的临近空间目标运动模型;
4、s2、根据当前时刻目标状态的估计值计算动压估计值;
5、s3、根据动压估计值和动压先验值,计算过程噪声的自适应调节因子;
6、s4、根据过程噪声方差先验值和自适应调节因子,计算当前时刻的过程噪声方差大小,并进一步计算过程噪声协方差矩阵;
7、s5、基于获得的过程噪声协方差矩阵,采用无迹卡尔曼滤波进行目标状态估计,更新目标状态估计值。
8、以上技术方案中优选的,s1中临近空间目标运动模型表示为:
9、
10、在公式(1)中:
11、
12、
13、其中:为x(t)对时间的一阶导数,x(t)=[φ λ r v θ σ ν kl kd]t为目标状态量;φ、λ、r、v、θ、σ分别表示目标的纬度、经度、地心距、速度、速度倾角、速度偏航角;ν、kl、kd分别表示目标的倾侧角、升力参数和阻力参数,ν、kl、kd为扩展状态;g为重力加速度;al和ad分别为升力加速度和阻力加速度;w(t)表示三个扩展状态的过程噪声;06×3表示6*3的零矩阵;i3×3表示3*3的单位矩阵。
14、以上技术方案中优选的,升力加速度al和阻力加速度ad表示为:
15、
16、其中:动压q=ρv2/2,cl和cd分别为升力系数和阻力系数,ρ是大气密度,s是飞行器参考面积,m为飞行器质量。
17、以上技术方案中优选的,大气密度ρ采用指数模型进行计算,表示为:
18、
19、其中:ρ0为海平面大气密度,e为自然常数,re为地球半径且re=6371km;h=6700km。
20、以上技术方案中优选的,三个扩展状态的过程噪声w(t)表示为:
21、
22、其中:wν、均为零均值高斯白噪声。
23、以上技术方案中优选的,s2中第k个时刻的目标估计值为,则动压估计值为:
24、
25、在公式(7)中:
26、
27、其中:为目标地心距估计值,为目标速度估计值,ρ0为海平面大气密度,e为自然常数,re为地球半径且re=6371km,hs=6700km。
28、以上技术方案中优选的,s3中第k个时刻过程噪声的自适应调节因子表示为:
29、
30、其中,qmid为动压先验值,为动压估计值。
31、以上技术方案中优选的,动压先验值qmid的计算方式为:
32、
33、在公式(10)中:
34、
35、
36、
37、其中:rmax和rmin分别为飞行全程地心距的最大值和最小值,vmax和vmin分别为飞行全程速度的最大值和最小值,ρ0为海平面大气密度,e为自然常数,re为地球半径且re=6371km,hs=6700km。
38、以上技术方案中优选的,s4中第k个时刻的过程噪声方差计算方式为:
39、
40、
41、其中,和均为过程噪声方差先验值,λk为过程噪声的自适应调节因子。
42、以上技术方案中优选的,过程噪声协方差矩阵的计算方式为:
43、
44、在公式(16)中:
45、
46、
47、
48、其中:δt为采样间隔,i为单位矩阵,为tk+δt/2时刻的雅可比矩阵,qk为不考虑相关性的过程噪声协方差矩阵,表示倾侧角过程噪声的方差,均为第k个时刻的过程噪声方差,为tk+δt/2时刻的目标估计值,为第k个时刻的目标估计值,为k+1时刻状态量的预测值,为基于求导结果的雅可比矩阵,表示将代入至目标运动模型的函数中。
49、应用本发明的技术方案,具有以下有益效果:
50、本发明通过基于动压的过程噪声自适应调节,能够有效削弱模型误差变化对目标跟踪的不利影响,从而提升跟踪精度和稳定性;利用所设计的自适应调节因子对扩展状态的过程噪声方差大小进行调节,可在模型误差较大时增大过程噪声,在模型误差较小时减小过程噪声。
51、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
技术特征:
1.一种用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,s1中临近空间目标运动模型表示为:
3.根据权利要求2所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,升力加速度al和阻力加速度ad表示为:
4.根据权利要求3所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,大气密度ρ采用指数模型进行计算,表示为:
5.根据权利要求2所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,三个扩展状态的过程噪声w(t)表示为:
6.根据权利要求1所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,s2中第k个时刻的目标估计值为则动压估计值为:
7.根据权利要求1所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,s3中第k个时刻过程噪声的自适应调节因子表示为:
8.根据权利要求7所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,动压先验值qmid的计算方式为:
9.根据权利要求1所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,s4中第k个时刻的过程噪声方差计算方式为:
10.根据权利要求1所述的用于临近空间目标跟踪的过程噪声自适应调节方法,其特征在于,过程噪声协方差矩阵的计算方式为:
技术总结
本发明提供一种用于临近空间目标跟踪的过程噪声自适应调节方法,包括:构建基于气动参数的临近空间目标运动模型;根据当前时刻目标状态的估计值计算动压估计值;根据动压估计值和动压先验值,计算过程噪声的自适应调节因子;根据过程噪声方差先验值和自适应调节因子,计算当前时刻的过程噪声方差大小,并进一步计算过程噪声协方差矩阵;基于获得的过程噪声协方差矩阵,采用无迹卡尔曼滤波进行目标状态估计,更新目标状态估计值。本发明通过基于动压的过程噪声自适应调节,能够有效削弱模型误差变化对目标跟踪的不利影响,从而提升跟踪精度和稳定性。
技术研发人员:郑伟,李钊,王奕迪
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!