水下爬壁清洁机器人多壁面作业路径规划方法及系统
本发明涉及特种机器人,特别是涉及水下爬壁清洁机器人多壁面作业路径规划方法及系统。
背景技术:
1、本部分的陈述仅仅是提到了与本发明相关的背景技术,并不必然构成现有技术。
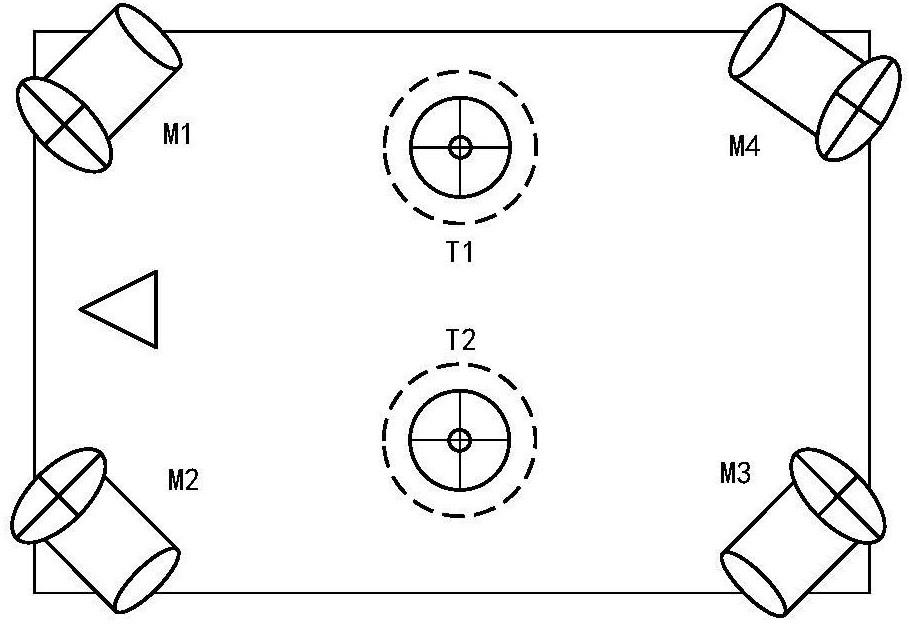
2、水下爬壁清洁机器人的工作过程是工作母船装载高压水射流设备、电力设备和水下爬壁清洁机器人到达要工作的区域后,工作母船行驶至第一个要工作的壁面上方,然后把连接调试好的机器人下放到该壁面周围,机器人运动到该壁面附近然后贴附在壁面上按照规划好的全遍历路径进行清洁作业,当机器人按次序完成所有壁面的清洁工作后,机器人返回工作母船位置并由工作母船进行回收。
3、面对水下三维多壁面作业环境的特点,需要考虑如何实现各壁面之间的遍历连接即如何规划所有工作壁面之间的遍历次序路径,使水下爬壁清洁机器人遍历完各壁面所消耗的能量最小。
4、水下爬壁清洁机器人对水下三维多壁面作业次序进行路径规划时,现有的评估水下机器人功率消耗情况的方法过于复杂,且不具有普适性;对多壁面作业次序路径进行规划的算法存在扰动机制单一且搜索最优解需要耗费大量时间的问题。
技术实现思路
1、为了解决现有技术的不足,本发明提供了水下爬壁清洁机器人多壁面作业路径规划方法、系统、电子设备及计算机可读存储介质,以能耗最优为约束条件,提出改进的模拟退火算法对壁面作业次序路径进行规划。
2、第一方面,本发明提供了水下爬壁清洁机器人多壁面作业路径规划方法;
3、水下爬壁清洁机器人多壁面作业路径规划方法,包括:
4、根据水下爬壁清洁机器人的基本运动形式,构建水下爬壁清洁机器人的三维运动模型;
5、对三维运动模型进行受力分析,获取水下爬壁清洁机器人的能效系数;
6、构建水下三维多壁面作业目标模型,以水下爬壁清洁机器人在运动过程中产生的总能耗最少为目的建立目标函数;
7、获取水下机器人的运动速度,根据运动速度和对应的能效系数,通过模拟退火算法对目标函数进行求解,获取水下爬壁清洁机器人的最优能耗作业路径。
8、进一步的,所述根据水下爬壁清洁机器人的基本运动形式,构建水下爬壁清洁机器人的三维运动模型包括:
9、根据水下爬壁清洁机器人的基本运动形式,确定水下爬壁清洁机器人在水下三维空间的运动模式;
10、对水下爬壁清洁机器人进行模型假设,根据运动模式和模型假设后的水下爬壁机器人,获取水下机器人在水下三维空间的运动学方程。
11、进一步的,水下爬壁清洁机器人的能效系数表示为:
12、
13、其中,c为阻力系数,ρ为密度,s为水下爬壁清洁机器人的端面面积,v为水下爬壁清洁机器人的运动速度。
14、进一步的,所述根据运动速度和对应的能效系数,通过模拟退火算法对目标函数进行求解,获取水下爬壁清洁机器人的最优能耗作业路径包括:
15、基于水下三维多壁面作业目标模型,根据运动速度和对应的能效系数,获取所有目标点间的相对过程能耗;
16、获取当前目标点目标,根据当前目标点坐标和所有目标点间的相对过程能耗,通过模拟退火算法对目标函数进行迭代求解,获取水下爬壁清洁机器人的最优能耗作业路径。
17、优选的,所述通过模拟退火算法对目标函数进行迭代求解包括:
18、s1、输入当前目标点坐标,根据当前目标点坐标和所有目标点间的相对过程能耗,获取当前目标点与预计到达目标点的相对运动总能耗,初始化模拟退火算法的控制参数,随机产生初始解;
19、s2、对初始解添加扰动得到新解;
20、s3、根据metropolis判别准则,判断是否接受新解;若是,则执行s4,若否,则执行s5;
21、s4、令初始解等于新解;
22、s5、判断迭代次数是否大于链长,若是,则执行s6,若否,则执行s2;
23、s6、判断是否连续n次没有出现最优解,若是,则采用第一降温策略进行降温,若否,则采用第二降温策略进行降温;
24、s7、判断温度是否小于预设温度阈值,若是则输出当前解,若否则执行s1。
25、优选的,所述metropolis判别准则表示为:
26、
27、其中,df为新路径和上一次路径的运动总消耗的差值。
28、进一步的,所述目标函数表示为:
29、
30、其中,td为水下爬壁清洁机器人运动过程中产生的总能耗,d(vi,vi+1)为水下爬壁清洁机器人由作业点vi抵达作业点vi+1的过程能耗。
31、第二方面,本发明提供了水下爬壁清洁机器人多壁面作业路径规划系统;
32、水下爬壁清洁机器人多壁面作业路径规划系统,包括:
33、三维运动模型构建模块,被配置为:根据水下爬壁清洁机器人的基本运动形式,构建水下爬壁清洁机器人的三维运动模型;
34、能耗分析模块,被配置为:对三维运动模型进行受力分析,获取水下爬壁清洁机器人的能效系数;
35、最优能耗作业路径获取模块,被配置为:构建水下三维多壁面作业目标模型,以水下爬壁清洁机器人在运动过程中产生的总能耗最少为目的建立目标函数;
36、获取水下机器人的运动速度,根据运动速度和对应的能效系数,通过模拟退火算法对目标函数进行求解,获取水下爬壁清洁机器人的最优能耗作业路径。
37、第三方面,本发明提供了一种电子设备;
38、一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成上述爬壁清洁机器人多壁面作业路径规划方法的步骤。
39、第四方面,本发明提供了一种计算机可读存储介质;
40、一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成上述爬壁清洁机器人多壁面作业路径规划方法的步骤。
41、与现有技术相比,本发明的有益效果是:
42、1、本发明提供的技术方案,通过改进的模拟退火算法进行路径规划,在模拟退火算法中,通过对原解添加扰动来得到新解,路径变异方式通过改善扰动机制来扩大全局最优解的搜索范围。若只使用一种路径变异方式,新路径只能从一个方向生成,会限制全局最优解的搜索范围,导致算法陷入局部最优解。通过增加多种路径变异方式,可以从不同方向产生新路径,这样就有更大的可能性逼近全局最优解,提升能耗最小路径规划的准确性。
43、本改进算法采用了三种路径变异方式:目标点交换、移位、倒置。其中,目标点交换是指随机选择两个目标点,将它们的位置交换;移位是指随机地将一个目标点插入到另一个目标点的前面;倒置是指将随机选出的两个目标点之间的目标点顺序完全倒置得到新的路径。
44、而在进行路径变异方式选择时,在每一个路径变异方式后面加入计数器,如果某一路径变异方式被连续选取m次,那么下次的路径变异方式便不再选择这个,改为随机选取另外两个方式中的一个。
45、2、本发明提供的技术方案,针对退火策略提出跳跃式降温,在每一次结束内循环后,都不是直接进行降温,而是先判断经过这次内循环后是否产生更优解,若连续n次都没有出现最优解,那么降温策略就由t=t*q改为t=t*q*q,进行一次跳跃式降温,把该温度临近的温度所需要进行的降温环节省略,进行相当于连续两次的降温过程。使用跳跃式降温策略的模拟退火算法相比于没有使用的,数据迭代处理的次数显著减少,提升路径规划的效率。
- 还没有人留言评论。精彩留言会获得点赞!