基于事件触发控制的异构多智能体系统一致性控制方法
本发明属于分布式控制,涉及一种多智能体系统一致性控制方法,具体涉及一种基于事件触发控制的异构多智能体系统一致性控制方法。
背景技术:
1、多智能体系统的分布式协调控制由于其在编队控制、集群控制和蜂拥控制等方面的广泛应用而得到了广泛的关注。集中式控制对比于分布式控制,要求每个节点都能有一个与中央控制器有着优良连接的网络通信,但是实际应用中由于通信延迟等因素的影响,集中式控制往往难以良好地实现预定的控制效果,并且由于可能存在的单点故障,集中式控制所发生故障的概率比分布式控制较高。分布式控制减少了集中式控制中中央控制器和各节点的通信时滞的影响,使系统能够适应动态变化的运行环境,减少了对全局通信的依赖,提高了系统的容错率和鲁棒性。
2、一致性问题作为最基本的分布式协调控制问题之一,是控制系统理论和图论的交叉领域,它是涉及一系列智能体通过信息交互与共享来达到共同目标的过程。一致性指的是智能体系统的各个状态随着时间的推移最终在某一时刻都趋近于同一个值,这种状态可以是卫星的运动姿态、鱼群或鸟群的行动方向、数据融合或者分布式传感器的滤波值。
3、目前,一致性问题的研究,主要成果集中在一阶系统、二阶系统、高阶系统和异构系统的协同一致性控制。“distributed event-triggered control of multi-agentsystems with combinational measurements”提出了一种组合测量方法的事件触发控制,区别于以往的事件触发控制,智能体只在它们自己的事件时间触发而不用考虑邻居的触发时刻,这在实践中减少了通信量,降低了控制器更新的频率。该方案提供了一个方法的可行性,但是并未考虑一阶二阶异构多智能体系统。“distributed event-triggeredconsensus control for leaderless heterogeneous multiagent systems”使用分布式事件触发控制方法,控制一阶二阶异构多智能体系统使其位置达到平均一致,速度收敛到0,排除了系统的zeno行为,但是该方案没有考虑组合测量方法的事件触发控制,不能更好的减轻控制输入更新的能量消耗。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于事件触发控制的异构多智能体系统一致性控制方法。
2、本发明的方法所采用的技术方案是:一种基于事件触发控制的异构多智能体系统一致性控制方法,所述异构多智能体系统含有m个一阶多智能体,n-m个二阶多智能体,通过加权无向网络进行通信;
3、首先根据所述异构多智能体系统收敛到一致时,智能体的位置收敛到位置的平均值,速度收敛到0,定义位置收敛平均值;然后将所述异构多智能体系统一致性问题转化为稳定性问题,通过分段控制输入率和事件触发控制,实现异构多智能体系统一致性控制。
4、本发明还提供了一种基于事件触发控制的异构多智能体系统一致性控制系统,包括:
5、一个或多个处理器;
6、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现所述的基于事件触发控制的异构多智能体系统一致性控制方法。
7、本发明还提供了一种存储介质,存储有程序,所述程序被处理器执行时,实现所述的基于事件触发控制的异构多智能体系统一致性控制方法。
8、与现有技术相比,本发明的优点是:
9、(1)结合了组合测量方法的事件触发控制,继承了一阶二阶异构多智能体系统一致性,减少通信资源损耗。
10、(2)矩阵q的条件为其最小奇异值大于0,以减少事件触发条件的保守性。
技术特征:
1.一种基于事件触发控制的异构多智能体系统一致性控制方法,其特征在于:所述异构多智能体系统含有m个一阶多智能体,n-m个二阶多智能体,通过加权无向网络进行通信;
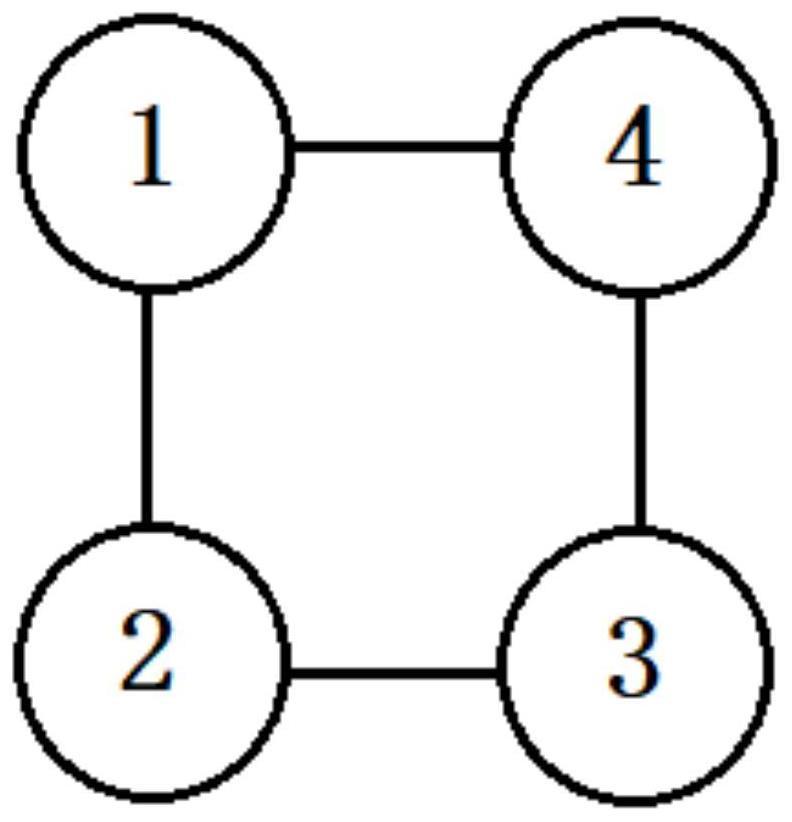
2.根据权利要求1所述的基于事件触发控制的异构多智能体系统一致性控制方法,其特征在于:所述加权无向网络的拓扑图定义为g={v,ε,a},v={v1,v2,...,vn}代表节点集,vi表示编号为i的智能体,1≤i≤n;代表边集;a=[aij]∈rn×n代表加权邻接矩阵,如果智能体i和智能体j之间存在信息链接则aij=1,否则aij=0;定义d为度矩阵,拉普拉斯矩阵l=d-a;
3.根据权利要求2所述的基于事件触发控制的异构多智能体系统一致性控制方法,其特征在于:
4.一种基于事件触发控制的异构多智能体系统一致性控制系统,其特征在于,包括:
5.一种存储介质,存储有程序,其特征在于,所述程序被处理器执行时,实现权利要求1至3中任一项所述的基于事件触发控制的异构多智能体系统一致性控制方法。
技术总结
本发明公开了一种基于事件触发控制的异构多智能体系统一致性控制方法,所述异构多智能体系统含有m个一阶多智能体,N‑m个二阶多智能体,通过加权无向网络进行通信;首先根据所述异构多智能体系统收敛到一致时,智能体的位置收敛到位置的平均值,速度收敛到0,定义位置收敛平均值;然后将所述异构多智能体系统一致性问题转化为稳定性问题,通过分段控制输入率和事件触发控制,实现异构多智能体系统一致性控制。本发明结合了组合测量方法的事件触发控制,继承了一阶二阶异构多智能体系统一致性。减少通信资源损耗。矩阵Q的条件为其最小奇异值大于0,以减少事件触发条件的保守性。
技术研发人员:姜晓伟,刘伟超,焦燃燃
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!