物料运输控制方法、装置、电子设备及存储介质与流程
本发明涉及智能物流,尤其涉及一种物料运输控制方法、装置、电子设备及存储介质。
背景技术:
1、在物流行业自动化的浪潮中,随着立体仓储成为仓储行业发展的主流,仓储机器人也成为了研究的热点问题之一。仓储机器人是应用最广泛的一种机器人,是一种在仓储车间可移动导引的智能小车,可以按照程序设置前进,被广泛运用到生产制造和物流领域。随着自动化控制技术的发展和自动导向车(automated guided vehicle,agv)技术的应用,关键技术与难点在于agv的路径规划和智能调度问题。
2、agv路径规划是将生产运输过程中的工作环境信息抽象成一幅电子地图,并在该地图上搜索出一条与周围障碍物不会产生冲突的最短路径。现有技术多个agv协同作业时,路径规划不够合理,导致agv运输耗时长、效率低,多个agv相遇时还会产生冲突和避障不及时的问题。
技术实现思路
1、本发明实施例提供了一种物料运输控制方法、装置、电子设备及存储介质,以解决agv按照现有技术规划的路径执行运输任务效率低的问题。
2、第一方面,本发明实施例提供了一种物料运输控制方法,包括:
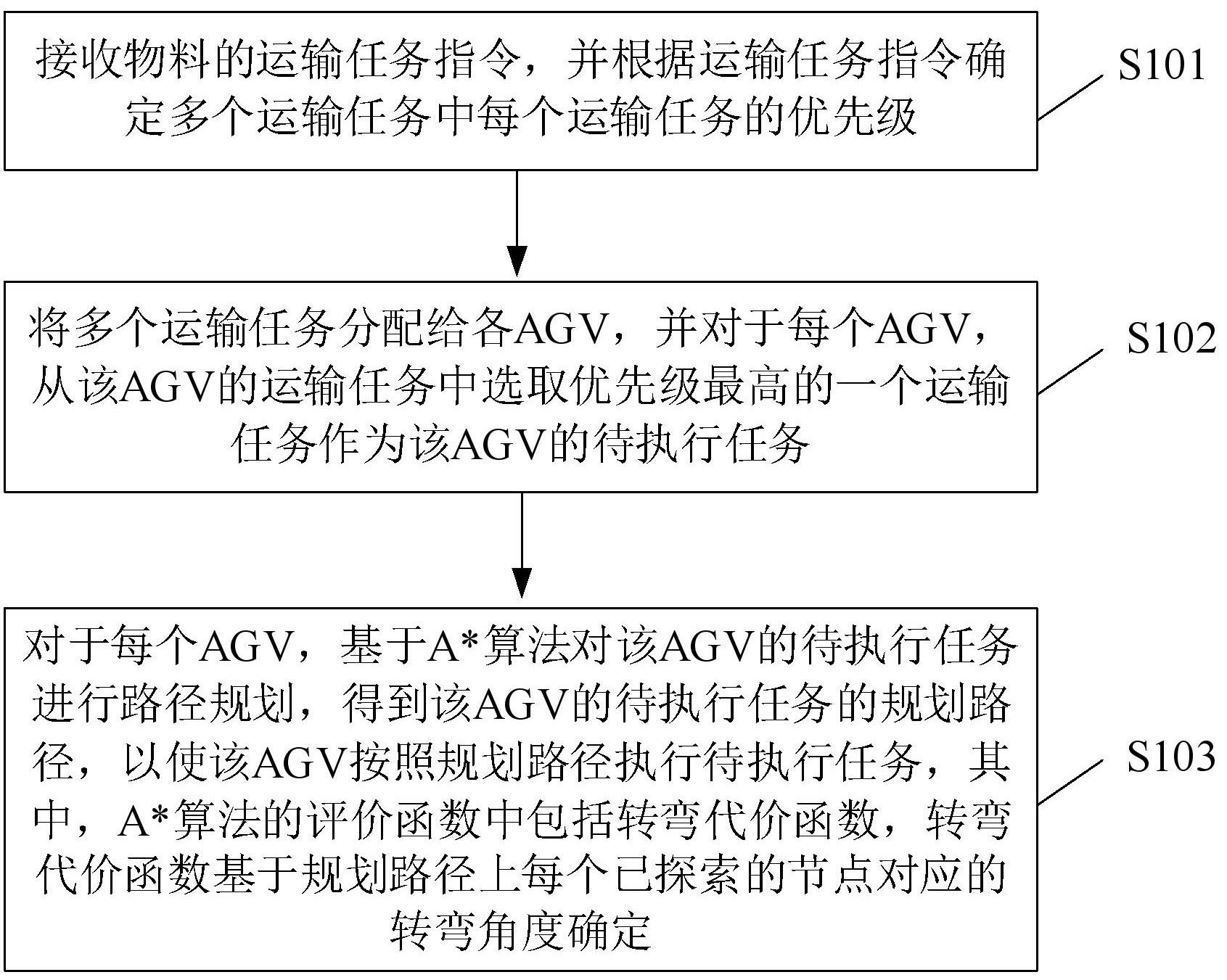
3、接收物料的运输任务指令,并根据所述运输任务指令确定多个运输任务中每个运输任务的优先级;
4、将所述多个运输任务分配给各agv,并对于每个agv,从该agv的运输任务中选取优先级最高的一个运输任务作为该agv的待执行任务;
5、对于每个agv,基于a*算法对该agv的待执行任务进行路径规划,得到该agv的待执行任务的规划路径,以使该agv按照所述规划路径执行所述待执行任务,其中,a*算法的评价函数中包括转弯代价函数,所述转弯代价函数基于规划路径上每个已探索的节点对应的转弯角度确定。
6、在一种可能的实现方式中,所述每个已探索的节点对应的转弯角度基于第一向量和第二向量的夹角确定,其中,所述第一向量为当前节点的上一个已探索的节点指向所述当前节点的向量,所述第二向量为所述当前节点指向所述当前节点的下一个节点的向量。
7、在一种可能的实现方式中,所述转弯代价函数为:
8、
9、其中,表示规划路径上的第个已探索的节点;表示当前节点;表示转弯代价系数;表示第个已探索的节点对应的转弯角度。
10、在一种可能的实现方式中,所述a*算法的评价函数中包括流量代价函数,其中,所述流量代价函数基于所有agv的规划路径中包含目标路段,且尚未通过所述目标路段的agv的数量确定,所述目标路段为当前节点与下一个待探索的节点之间的路段。
11、在一种可能的实现方式中,所述评价函数为:
12、
13、其中,表示在通过节点的情况下,从起始节点到目标节点的最优路径的实际时间成本;为实际代价,表示从起始节点到节点的最优路径的实际时间成本;为启发函数,表示从节点到目标节点的最优路径的估计时间成本;为转弯代价函数;为流量代价函数。
14、在一种可能的实现方式中,所述运输任务指令包括每个运输任务的任务发布时间和任务重要程度;
15、每个运输任务的优先级通过下式确定:
16、
17、其中,为运输任务的优先级;为任务发布时间,表示任务发布时刻与当前时刻之间的时长;为任务重要程度;为暂停等待时长,表示正在执行运输任务的agv在规划路径中的暂停等待时长;、和为权重;
18、所述方法还包括:
19、当监测到多个agv执行运输任务在某一节点相遇时,按照优先级由高到低控制agv依次通过该节点,每次仅通过一个agv,其余agv暂停等待;
20、对于每个agv,分别累计该agv的暂停等待时长,并根据所述暂停等待时长更新该agv正在执行的运输任务的优先级。
21、在一种可能的实现方式中,所述对于每个agv,基于a*算法对该agv的待执行任务进行路径规划,得到该agv的待执行任务的规划路径,包括:
22、基于所述待执行任务确定规划路径的起始节点和目标节点;
23、从所述起始节点开始对其可到达的相邻节点进行探索,将所述起始节点设置为当前节点,计算所述当前节点的相邻节点的代价函数,选择代价函数最小的相邻节点作为规划路径的拓展节点;
24、设置所述拓展节点为新的当前节点,重复上述节点探索步骤至无节点可拓展,得到所述待执行任务的规划路径。
25、第二方面,本发明实施例提供了一种物料运输控制装置,包括:
26、确定模块,用于接收物料的运输任务指令,并根据所述运输任务指令确定多个运输任务中每个运输任务的优先级;
27、选取模块,用于将所述多个运输任务分配给各自动导向车agv,并对于每个agv,从该agv的运输任务中选取优先级最高的一个运输任务作为该agv的待执行任务;
28、规划模块,用于对于每个agv,基于a*算法对该agv的待执行任务进行路径规划,得到该agv的待执行任务的规划路径,以使该agv按照所述规划路径执行所述待执行任务,其中,a*算法的评价函数中包括转弯代价函数,所述转弯代价函数基于规划路径上每个已探索的节点对应的转弯角度确定。
29、第三方面,本发明实施例提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
30、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
31、本发明实施例提供一种物料运输控制方法、装置、电子设备及存储介质,通过接收物料的运输任务指令,并根据运输任务指令确定多个运输任务中每个运输任务的优先级。然后将多个运输任务分配给各agv,并对于每个agv,从该agv的运输任务中选取优先级最高的一个运输任务作为该agv的待执行任务。对于每个agv,基于a*算法对该agv的待执行任务进行路径规划,得到该agv的待执行任务的规划路径,以使该agv按照规划路径执行待执行任务。其中,a*算法的评价函数中包括转弯代价函数,转弯代价函数基于规划路径上每个已探索的节点对应的转弯角度确定。本发明通过累计规划路径中已探索的节点对应的转弯代价,将转弯代价函数添加进a*算法的评价函数中,提高了agv路径规划的准确度,以及agv物料运输的整体效率。
技术特征:
1.一种物料运输控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述每个已探索的节点对应的转弯角度基于第一向量和第二向量的夹角确定,其中,所述第一向量为当前节点的上一个已探索的节点指向所述当前节点的向量,所述第二向量为所述当前节点指向所述当前节点的下一个节点的向量。
3.根据权利要求1所述的方法,其特征在于,所述转弯代价函数为:
4.根据权利要求1所述的方法,其特征在于,所述评价函数为:
5.根据权利要求1所述的方法,其特征在于,所述运输任务指令包括每个运输任务的任务发布时间和任务重要程度;
6.根据权利要求1所述的方法,其特征在于,所述对于每个agv,基于a*算法对该agv的待执行任务进行路径规划,得到该agv的待执行任务的规划路径,包括:
7.一种物料运输控制装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至6中任一项所述方法的步骤。
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至6中任一项所述方法的步骤。
技术总结
本发明提供一种物料运输控制方法、装置、电子设备及存储介质。该方法包括:接收物料的运输任务指令,并根据运输任务指令确定多个运输任务中每个运输任务的优先级;将多个运输任务分配给各AGV,并对于每个AGV,从该AGV的运输任务中选取优先级最高的一个运输任务作为该AGV的待执行任务;对于每个AGV,基于A*算法对该AGV的待执行任务进行路径规划,得到该AGV的待执行任务的规划路径,以使该AGV按照规划路径执行待执行任务;其中,A*算法的评价函数中包括转弯代价函数,转弯代价函数基于规划路径上每个已探索的节点对应的转弯角度确定。本发明能够提高AGV路径规划的准确度,以及AGV物料运输的整体效率。
技术研发人员:史树恒
受保护的技术使用者:河北高大永恒塑料制品有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!