一种智能无人船两阶段多目标点全局路径规划方法与流程
本发明涉及无人船路径规划技术邻域,尤其涉及一种智能无人船两阶段多目标点全局路径规划方法。
背景技术:
1、目前,各种无人技术如无人机、无人车和无人船等设备在当前社会中被广泛应用。其中水面智能无人船(unmanned surface vehicle,usv)作为一种无人设备,凭借体积小、成本低、灵活度高等优势,能够适用于各种复杂水域,在诸多领域(如军事、工业、科研等)有着广阔的应用前景。
2、凭借智能无人船的诸多优势,将智能无人船应用到水质采样具有良好的前景。智能无人船能够替代人工航行到指定采样点进行水质样本采集。由于具备多个采样点,这就需要智能无人船能够沿着可以遍历所有采样点且没有障碍物的路径运动。而且智能无人船航行时容易因为环境的干扰而偏离期望的路径,这就需要智能无人船的控制系统能够保持智能无人船沿着期望的路径航行。
3、粒子群优化(particle swarm optimization,pso)算法作为一种全局优化算法,能够求出全局最优解而不是局部最优解。在粒子群优化算法中,算法的搜索效率和收敛速度与惯性权重的取值有很大的关系。较大的惯性权重有利于全局搜索,较小的惯性权重有利于局部寻优。所以,如何选择惯性权重是一个需要解决的问题。并且,如何实现全局搜索与局部开发的平衡,以保证在全局范围内获得最佳解也是一个需要解决的问题。
4、模拟退火(simulated annealing,sa)算法利用boltzmann概率避免了算法陷入局部最优解,并成功地应用于求解旅行商问题(tsp)等问题。但sa算法也存在一些问题,第一个问题是它的搜索速度比较慢,原因是在每个温度下需要执行多次metropolis算法的迭代才能得到一个好的结果。第二个问题是在选择不同的扰动机制时难以决策,因为每种扰动机制的收敛速度和寻找优化解的能力是难以预估的。第三个问题是由于存在能够接受低质量解的机制,在后续的迭代过程中可能抛弃当前的最优解。
5、因此,为了解决上述问题,研究智能无人船进行水质采样时的多目标点全局路径规划与路径跟踪方法是十分必要的。
技术实现思路
1、本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种智能无人船两阶段多目标点全局路径规划方法。
2、本发明解决其技术问题所采用的技术方案是:
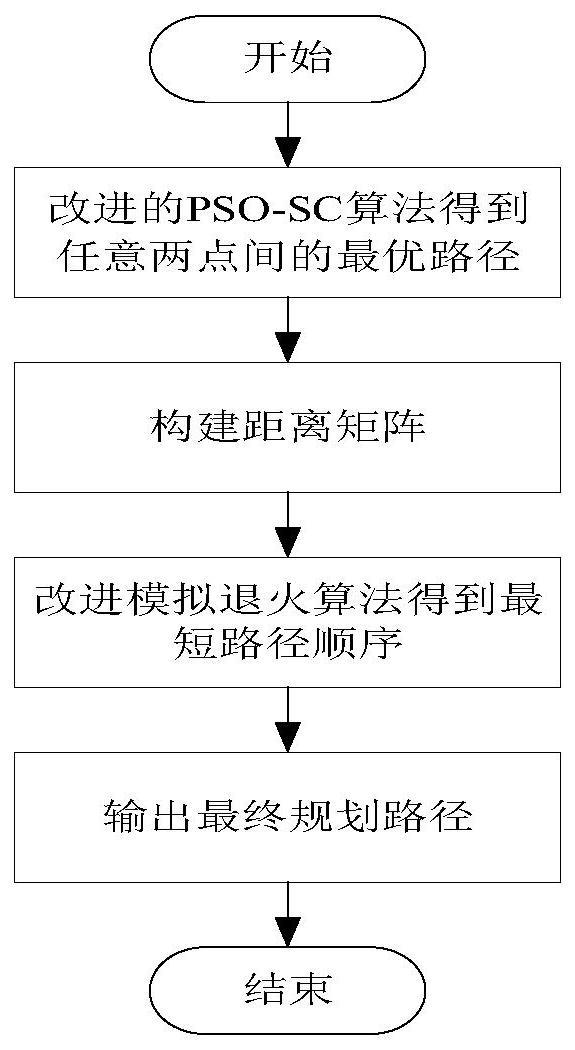
3、本发明提供一种智能无人船两阶段多目标点全局路径规划方法,该方法包括以下步骤:
4、步骤1、获取智能无人船工作过程中的起点和所有目标点,并对起点和所有目标点在栅格图中进行编号;
5、步骤2、构建起点和所有目标点之间的距离矩阵;
6、步骤3、单目标点路径规划:从距离矩阵中读取起始点和目标点的信息,通过引入非线性自适应惯性参数和正弦余弦因子,对粒子群算法进行改进,以路径距离和路径平滑度为评价指标,采用改进粒子群算法求解各点之间的最优路径和相应的距离;
7、步骤4、将各点之间的最优路径长度保存在矩阵中,然后将矩阵补全为对称形式,得到更新后的完整的距离矩阵;
8、步骤5、多目标点路径寻优:通过改变温度衰减系数、增加多邻域搜索和记忆器,对模拟退火算法进行改进,以距离最短为目标,采用改进模拟退火算法求解了多目标点的路径寻优问题,得到最短路径顺序;
9、步骤6、输出智能无人船的最终规划路径。
10、进一步地,本发明的所述步骤2中构建的距离矩阵为:
11、
12、其中,起点和所有目标点在栅格图中对应的编号,按升序的方式对它们进行排序,编号分别为[s1,s2,...,sn],(sn-1,sn)表示点sn和点sn-1,之间的距离。
13、进一步地,本发明的所述步骤3中引入非线性自适应惯性参数对粒子群算法进行改进的方法为:
14、第i个粒子在整个d维搜索空间中位置为速度为用n个粒子来表示不同的解,第i个粒子搜索到的个体最优位置为所有粒子中的最优位置为再将xi带入适应度函数来计算适应度值,根据以下公式来更新每个粒子的速度和位置:
15、
16、
17、式中,i=1,2,...,n,t为迭代次数,ω为惯性权重,c1和c2为学习因子,r1和r2为区间[0,1]内的随机数;
18、为了平衡全局搜索和局部寻优效果,结合非线性和自适应的方法,对ω进行调节,惯性系数ω的更新公式如下:
19、ω=ωmax-(ωmax-ωmin)*artanht/tmax
20、式中,ωmax和ωmin分别表示粒子在粒子群算法中惯性权重的上限和下限,t代表算法当前的迭代次数;tmax为最大迭代次数;通过引入反双曲正切函数artanh(x)使ω取值随着迭代次数变化自适应调整。
21、进一步地,本发明的所述步骤3中引入正弦余弦因子对粒子群算法进行改进的方法为:
22、在引入非线性自适应惯性参数的基础上,引入正弦余弦因子,对更新每个粒子位置的方程进行改进:
23、
24、式中,表示第i个粒子在第t次迭代中在第d维的位置,表示当前迭代次数t中的最优解;r1、r2、r3为随机数,r4控制着正弦余弦的更新切换选择,r4~u[0,1],表示0到1之间的随机数;
25、第i个粒子的全局最佳位置更新为:
26、
27、每个粒子依据自身最优位置和群体最优位置,更新其速度和位置;直到最终设置的终止条件,终止条件包括:迭代次数或适应度值。
28、进一步地,本发明的所述步骤3中以路径距离和路径平滑度来设计适应度函数,其方法为:
29、所规划的路径要尽可能保证距离短,以此来减少智能无人船运动时的能源消耗,增加续航时间;路径距离fl为:
30、
31、其中,第i个路径点的坐标为(xi,yi),相邻下一个路径点坐标的坐标为(xi+1,yi+1),n表示路径节点的总数量;
32、通过设置路径平滑度使得智能无人船的运动更加平稳,路径平滑度fr为:
33、
34、式中,θi表示前后两段路径之间的夹角;
35、基于归一化的方法,并结合多目标权重分配策略,以路径长度权重取1为基础,对多个目标进行统一化处理;统一化权重系数γ为:
36、
37、路径平滑度的权重取为1/2,fl/n-1和fr/n-2分别为所有路径分段长度的均值以及所有路段之间夹角的均值;
38、适应度函数为表示为:
39、f=fl+γfr
40、适应度函数f的值越小,代表所规划的路径长度越短,更加的平滑,路径质量越高。
41、进一步地,本发明的所述步骤5中的方法包括:
42、在智能无人船多目标点全局路径规划问题中,包括起点和目标点在内共有n个点需要被依次访问;将其描述为tsp问题,不同的目标点组合产生了n(n-1)/2条不同的路径,最终目标是选择一种最佳的路径组合,使得智能无人船在依次访问所有目标点后能够回到起点,同时保证路径长度最短;通过模拟退火算法进行求解:
43、步骤5.1、初始化系统温度t=t0,随机产生一个初始解x0,即随机产生一个可行路径,计算其目标函数值e(x0),即起点到目标点的距离;
44、步骤5.2、采用温度衰减系数来改进模拟退火算法,温度衰减系数的公式为:
45、
46、式中,k为迭代次数,k为总降温次数,利用该函数不断衰减温度t;
47、步骤5.3、对当前解xt施加扰动,通过多邻域搜索的方式来改进模拟退火算法,通过多邻域搜索的方式产生新解xt+1,计算其目标函数值e(xt+1),并计算:
48、δe=e(xt+1)-e(xt)
49、步骤5.4、如果δe<0,则采纳新解xt+1作为当前解;如果δe>0,则以概率e-δe/kt采纳新解xt+1作为当前解;更新并存储历史最优解;
50、步骤5.5、在当前温度下重复上述步骤,直到达到设定的迭代次数;
51、步骤5.6、判断是否满足输出条件,若不满足,则通过多普勒衰减函数降低温度,并重置迭代次数,返回步骤5.2重新求解;若满足输出条件,则输出最优解,即最优路径。
52、进一步地,本发明的所述步骤5.3中通过多邻域搜索的方式来改进模拟退火算法的方法为:
53、采用了多邻域搜索的方式来产生新解,在生成新解时结合基于概率的交叉变异操作,把解中的两个元素交换位置,或者把一个元素插入到另一个位置,或者把一段元素反转顺序从而产生多个新解;对这些新解分别计算目标函数取最小值对应的解作为真正新解。
54、进一步地,本发明的所述步骤5中还包括通过记忆器改进模拟退火算法的方法:
55、通过引入记忆器改进传统模拟退火算法的接受低质量解的机制;记忆器用于在算法运行过程中记录下整个运行过程中出现的优解,并进行更新;在算法的最后,将记忆器中记录的最优解与改进模拟退火算法的最终解进行比较;只有在记忆器中的更优解出现时,才会进行替换。
56、本发明产生的有益效果是:
57、本发明针对智能无人船的路径规划问题,提出了两阶段多目标点全局路径规划方法,分解为单目标点路径规划和多目标点路径寻优两个子问题,该方法中:
58、1、通过引入非线性自适应惯性参数和正弦余弦因子,对粒子群算法进行改进,从而能够找到粒子的全局最佳位置,使得改进pso算法的搜索能力得到了提升,并表现出更高的求解精度和效率。其中:
59、(1)引入非线性自适应惯性参数,其中引入反双曲正切函数artanh(x)使自适应惯性参数ω取值随着迭代次数变化自适应调整,迭代开始时,反双曲正切函数的值比较小,使得ω比较大,有利于粒子搜索全局最优解;迭代进行时,反双曲正切函数的值逐渐变大,使得ω变小,增强了粒子的局部搜索能力;同时函数的变化速率比较缓和,有助于粒子稳定地寻优。
60、(2)引入正弦余弦因子,正弦函数与余弦函数进行概率性切换,使得粒子展开出震荡衰减性的搜索移动,从而拓宽了粒子的探索空间。
61、2、通过改变温度衰减系数、增加多邻域搜索和记忆器,对模拟退火算法进行改进,提高了算法的收敛速度。其中:
62、(1)通过改变温度衰减系数,防止算法停留在局部最优解,也提高了算法的搜索速度和效率。
63、(2)采用了多邻域搜索的方式来产生新解,该操作参考了遗传算法的基于概率的交叉变异操作,通过对新解多样性的引入来提高解的质量和搜索空间的效率。
64、(3)由于传统sa算法接受低质量解的机制,可能导致算法在前期已经找到了全局最优解,但在后期因为算法选择接受了劣解而放弃了最优解。本发明设计了一个记忆器,该记忆器能够在算法运行过程中记录下整个运行过程中出现的优解,并进行更新,防止算法接受低质量解。
- 还没有人留言评论。精彩留言会获得点赞!