一种基于检测目标居中处理的电力杆塔无人机智能巡检方法及系统与流程
本发明涉及无人机智能巡检的,特别涉及一种基于检测目标居中处理的电力杆塔无人机智能巡检方法及系统。
背景技术:
1、随着无人机技术的快速发展,无人机在电力设备巡检行业得到了广泛的应用,为复杂电力系统的安全检查减少了大量人力、时间以及经济成本,已成为从业人员高效安全作业的有力辅助。
2、现有技术中,无人机普遍采用视觉识别方式寻找指定目标,但由于无人机飞行高度、相机转动角度等问题,使得指定目标随机出现在图像的不同位置,这对于图像后续处理带来了不必要的像素丢失。另外,无人机小型算力设备无法处理复杂神经网络模型,且无法实时传输到终端设备,具有一定的延时性。
技术实现思路
1、发明目的:提出一种基于检测目标居中处理的电力杆塔无人机智能巡检方法及系统,以解决现有技术存在的上述问题,通过检测目标居中拍摄的处理方式,有效减少了电力设备巡检过程中所需的人工、经济成本,提高了巡检作业的安全可靠性。
2、技术方案:第一方面,提出了一种基于检测目标居中处理的电力杆塔无人机智能巡检方法,该方法包括以下步骤:
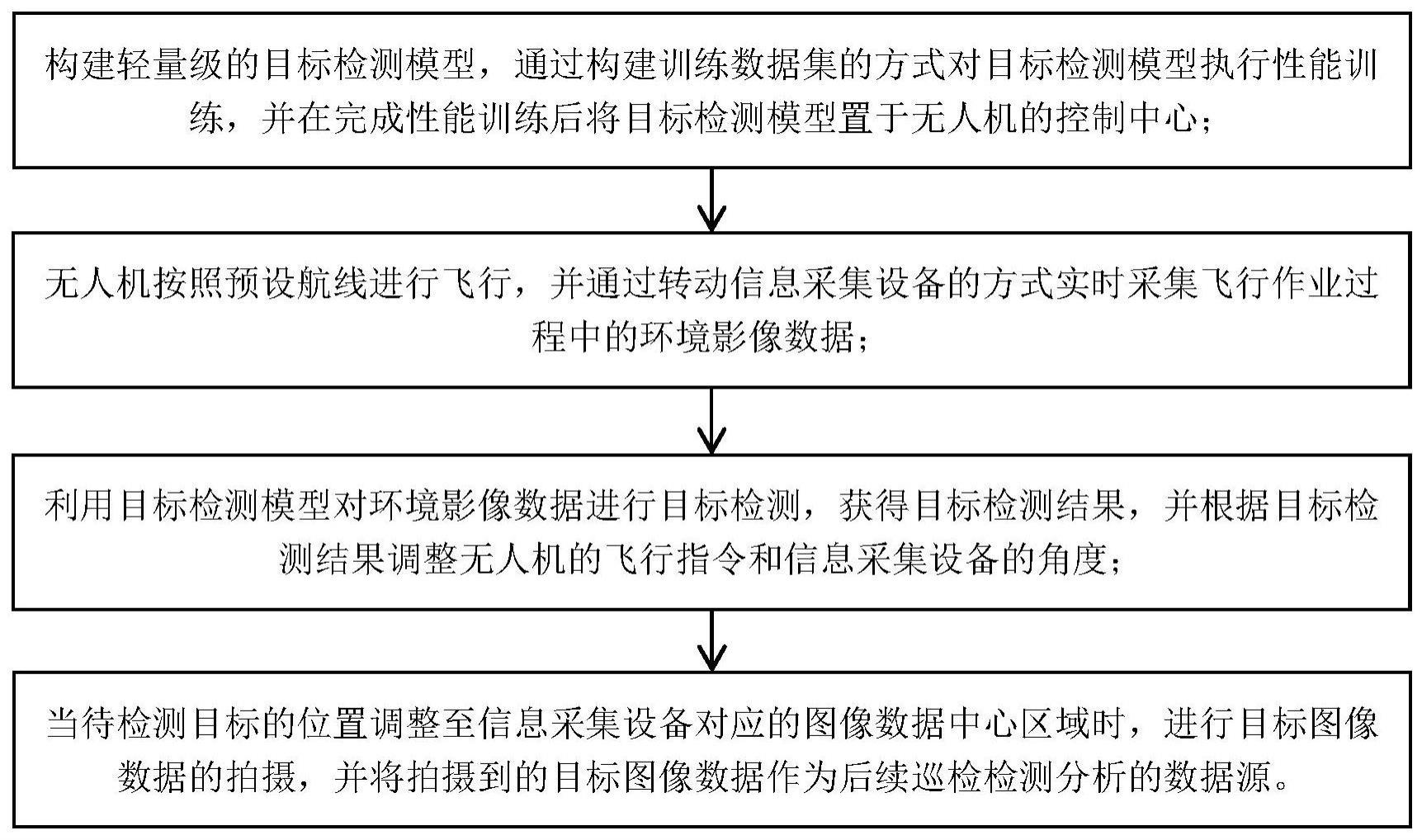
3、构建轻量级的目标检测模型,通过构建训练数据集的方式对所述目标检测模型执行性能训练,并在完成性能训练后将所述目标检测模型导入无人机的控制中心;
4、无人机按照预设航线进行飞行,并通过转动信息采集设备的方式实时采集飞行作业过程中的环境图像数据;
5、利用所述目标检测模型对环境图像数据进行目标检测,获得目标检测结果,并根据目标检测结果调整无人机的飞行指令和信息采集设备的角度;
6、当待检测目标的位置调整至信息采集设备对应的图像数据中心区域时,进行目标图像数据的拍摄,并将拍摄到的目标图像数据作为后续巡检检测分析的数据源。
7、在第一方面的一些可实现方式中,利用所述目标检测模型对环境图像数据进行目标检测的过程中,采用mobilenetv3网络对采集的图像数据进行特征提取和特征分析,并引入se通道注意力机制对特征图像中不同通道选择不同的权重。
8、其中,采用mobilenetv3网络作为特征提取的基础网络,首先,图像输入到1×1卷积进行通道扩展,然后通过3×3深度卷积进行图像特征提取,再经过平均池化整合特征提取的图像信息;
9、将得到的特征图像输送到se模块,通过卷积层对特征权重进行校正,从而提高特征图像的识别能力和网络的学习能力;
10、最后,通过1×1卷积将特征图像映射到低维空间,得到与原输入尺寸相同的特征图像。
11、在第一方面的一些可实现方式中,利用所述目标检测模型执行目标检测的过程包括以下步骤:
12、对接收到的环境图像数据执行归一化处理,获得归一化后的图像数据并将归一化处理后的结果输入目标检测模型中;
13、目标检测模型对接收到的归一化图像数据执行特征提取操作,获得归一化图像特征;
14、对归一化图像特征执行特征检测,获得特征检测结果;
15、基于所述特征检测结果执行分类操作,获得预测的分类结果;
16、基于检测目标中心点偏置尺寸和类别置信度对整体损失函数进行评估,使用极大值抑制算法对每个类别的预测的分类结果检测框进行打分,并保留最高分的选框;
17、将最高分选框对应的位置作为无人机巡检过程中信息采集设备角度更新的参考标准位置。
18、第二方面,提出一种基于检测目标居中处理的电力杆塔无人机智能巡检系统,用于实现基于检测目标居中处理的电力杆塔无人机智能巡检方法,该系统包括以下模块:
19、用于构建目标检测模型的模型构建模块;
20、用于执行模型性能训练的模型性能训练模块;
21、用于实时采集无人机巡检过程中图像数据的数据采集模块;
22、用于对图像数据执行目标检测分析的数据分析模块;
23、用于更新无人机飞行质量以及相机及拍摄角度的角度更新模块;
24、用于执行目标拍摄的目标拍摄模块。
25、第三方面,提出一种基于检测目标居中处理的电力杆塔无人机智能巡检设备,该设备包括:处理器以及存储有计算机程序指令的存储器,当处理器读取并执行计算机程序指令时,以实现基于检测目标居中处理的电力杆塔无人机智能巡检方法。
26、第四方面,提出一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序指令,当计算机程序指令被处理器执行时,以实现基于检测目标居中处理的电力杆塔无人机智能巡检方法。
27、有益效果:本发明提出了一种基于检测目标居中处理的电力杆塔无人机智能巡检方法及系统,通过控制无人机目标居中拍摄,增强了检测目标拍摄的准确性,提高了后续影像资料的使用价值以及无人机自主巡检的效率;同时,巡检过程中无人机在预设航线飞行同时自动对目标影像进行检测,飞行指令基于图像中心与检测目标中心的坐标差进行调整,有效减少了对操作人员的依赖性,同时也降低了时间和经济成本。另外,本发明提出的mobilenetv3-ssd分类检测模型,引入了改进的通道注意力结构对有效特征赋予更大的权重,增强了模型检测的准确度和运行速度。
技术特征:
1.一种基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,所述目标检测模型包括:mobilenetv3网络、se模块和分类模块,利用所述目标检测模型对环境影像数据进行目标检测的过程中,采用mobilenetv3网络对采集的图像数据进行特征提取和特征分析,并通过引入se模块中的se通道注意力机制对特征图像中不同通道选择不同的权重,最后采用分类模块获得最终的目标检测结果。
3.根据权利要求2所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,针对mobilenetv3网络获得的特征图像,采用改进se通道注意力机制整合不同通道的特征图像,对应包括以下步骤:
4.根据权利要求1所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,将无人机巡检过程不同方位以及不同环境下采集到的环境图像数据作为训练数据集,在所述目标检测模型执行性能训练的过程中将构建的训练数据集按照预设比例划分成训练集和验证集;
5.根据权利要求1所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,利用所述目标检测模型执行目标检测的过程包括以下步骤:
6.根据权利要求2所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,所述目标检测模型中的se模块,包括se通道注意力机制;在执行数据分析的过程中通过se模块对特征权重进行校正;
7.一种基于检测目标居中处理的电力杆塔无人机智能巡检系统,用于实现如权利要求1-6任意一项所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法,其特征在于,包括以下模块:
8.一种基于检测目标居中处理的电力杆塔无人机智能巡检设备,其特征在于,所述设备包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-6任意一项所述的基于检测目标居中处理的电力杆塔无人机智能巡检方法。
技术总结
本发明提出了一种基于检测目标居中处理的电力杆塔无人机智能巡检方法,属于无人机智能巡检的技术领域。针对无人机巡检过程中对投入成本以及计算设备的算力要求,构建轻量型的目标检测模型,并在完成模型性能训练后置于无人机控制中心,实现在满足算力要求的同时,减少模型的占用资源;同时,为了保证后续数据分析所需要的图像数据质量,通过调整相机位置的方式,使得检测目标在拍摄画面中处于居中位置,进而增强检测目标拍摄的准确性,提高了后续影像资料的使用价值以及无人机自主巡检的效率。
技术研发人员:冷聪,魏学备
受保护的技术使用者:中科方寸知微(南京)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!