一种控制方法、装置、设备及存储介质
本公开涉及信息处理,尤其涉及一种控制方法、装置、设备及存储介质。
背景技术:
1、目前,随着无人车技术的发展,利用无人车技术进行小区巡逻和区域清洁等得到了广泛的应用。通常,对于面积很大的区域,单个无人车进行巡逻或清洁时作业效率很低,因此,为了提高作业效率通常需要多个无人车合作作业。
2、然而,如何控制共同作业于同一片区域的多个无人车,保证其作业效率成为了一个亟待解决的技术问题。
技术实现思路
1、本公开提供了一种控制方法、装置、设备及存储介质,以至少解决现有技术中存在的以上技术问题。
2、根据本公开的第一方面,提供了一种控制方法,所述方法包括:
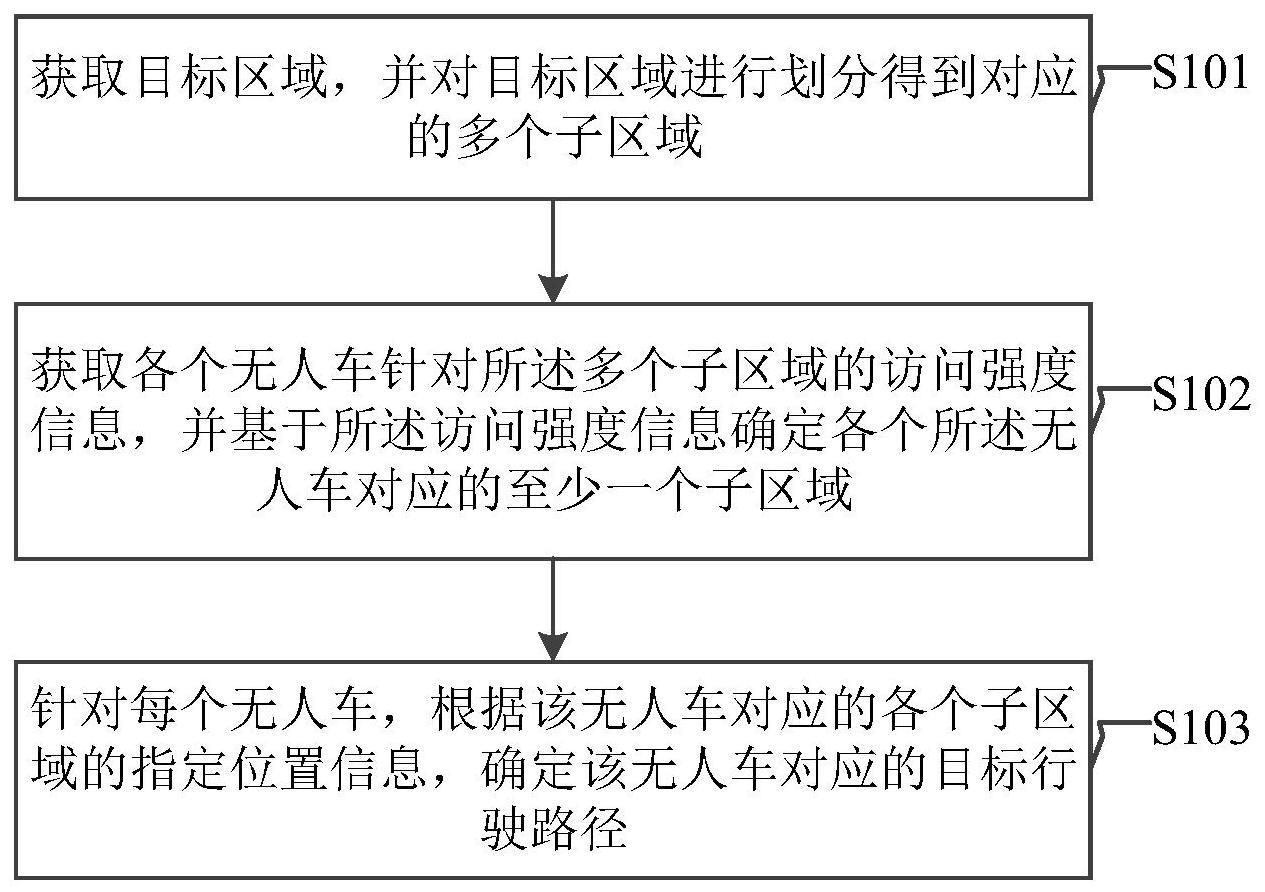
3、获取目标区域,并对目标区域进行划分得到对应的多个子区域;
4、获取各个无人车针对所述多个子区域的访问强度信息,并基于所述访问强度信息确定各个所述无人车对应的至少一个子区域;
5、针对每个无人车,根据该无人车对应的各个子区域的指定位置信息,确定该无人车对应的目标行驶路径。
6、在一可实施方式中,所述获取目标区域,包括:
7、确定指定区域中障碍目标所在的障碍区域;
8、将去除所述指定区域中的所述障碍区域后得到的区域确定为目标区域。
9、在一可实施方式中,所述获取各个无人车针对所述多个子区域的访问强度信息,并基于所述访问强度信息确定各个所述无人车对应的至少一个子区域,包括:
10、在进入循环周期时,获取各个无人车对应的区域划分信息和各个无人车针对各个子区域的访问强度信息,所述区域划分信息用于表征无人车在所述目标区域中所占据的区域,无人车在所述目标区域中所占据的区域为无人车在所述目标区域中所占据的各个子区域所组成的区域;
11、根据所述区域划分信息和所述访问强度信息,确定各个无人车对所述目标区域的占据状态信息,以及各个无人车对应的第一访问强度和第二访问强度,其中,无人车对应的第一访问强度为该无人车对所占据的各个子区域的最小访问强度,第二访问强度为与该无人车相邻的其他无人车对所占据的各个子区域的最大访问强度;
12、针对每个无人车,若所述占据状态信息表示各个无人车所占据的区域为对所述目标区域均匀划分后的结果,且该无人车对应的第一访问强度大于第二访问强度,控制该无人车访问该无人车当前所占据的第一目标子区域,所述第一目标子区域为该无人车当前所占据的各个子区域中对应的访问强度最小的子区域;
13、若所述占据状态信息表示各个无人车所占据的区域不是对所述目标区域均匀划分后的结果,且该无人车对应的第一访问强度大于第二访问强度,控制该无人车访问第二目标子区域,所述第二目标子区域为与该无人车相邻的各个无人车中对应的占据的区域最大的无人车所占据的子区域;
14、若该无人车对应的第一访问强度不大于第二访问强度,控制该无人车访问第三目标子区域,所述第三目标子区域为与该无人车相邻的无人车所占据的子区域;
15、在所述循环周期结束时,确定所述目标区域是否被均匀划分;
16、如果是,确定各个子区域所属的无人车信息和各个子区域对应的访问强度信息,得到各个所述无人车对应的至少一个子区域;
17、如果否,当进入下一个循环周期时,返回执行所述获取各个无人车对应的区域划分信息和各个无人车针对各个子区域的访问强度信息的步骤。
18、在一可实施方式中,子区域的指定位置信息为子区域的中心位置;
19、所述针对每个无人车,根据该无人车对应的各个子区域的指定位置信息,确定该无人车对应的目标行驶路径,包括:
20、针对每个无人车,将该无人车所占据的各个子区域划分为至少两个网格,并确定每个所述网格的中心,作为第一中心位置;
21、根据所述第一中心位置确定主路径;
22、将该无人车所占据的各个子区域的中心位置以围绕所述主路径所构成的路径确定为该无人车对应的目标行驶路径。
23、在一可实施方式中,所述方法还包括:
24、检测各个无人车在所述目标区域内所占据的区域是否发生变化;
25、如果是,重新确定各个无人车对应的至少一个子区域。
26、根据本公开的第二方面,提供了一种控制装置,所述装置包括:
27、区域划分模块,用于获取目标区域,并对目标区域进行划分得到对应的多个子区域;
28、子区域确定模块,用于获取各个无人车针对所述多个子区域的访问强度信息,并基于所述访问强度信息确定各个所述无人车对应的至少一个子区域;
29、路径确定模块,用于针对每个无人车,根据该无人车对应的各个子区域的指定位置信息,确定该无人车对应的目标行驶路径。
30、在一可实施方式中,所述区域划分模块,具体用于确定指定区域中障碍目标所在的障碍区域;将去除所述指定区域中的所述障碍区域后得到的区域确定为目标区域。
31、在一可实施方式中,所述子区域确定模块,具体用于在进入循环周期时,获取各个无人车对应的区域划分信息和各个无人车针对各个子区域的访问强度信息,所述区域划分信息用于表征无人车在所述目标区域中所占据的区域,无人车在所述目标区域中所占据的区域为无人车在所述目标区域中所占据的各个子区域所组成的区域;根据所述区域划分信息和所述访问强度信息,确定各个无人车对所述目标区域的占据状态信息,以及各个无人车对应的第一访问强度和第二访问强度,其中,无人车对应的第一访问强度为该无人车对所占据的各个子区域的最小访问强度,第二访问强度为与该无人车相邻的其他无人车对所占据的各个子区域的最大访问强度;针对每个无人车,若所述占据状态信息表示各个无人车所占据的区域为对所述目标区域均匀划分后的结果,且该无人车对应的第一访问强度大于第二访问强度,控制该无人车访问该无人车当前所占据的第一目标子区域,所述第一目标子区域为该无人车当前所占据的各个子区域中对应的访问强度最小的子区域;若所述占据状态信息表示各个无人车所占据的区域不是对所述目标区域均匀划分后的结果,且该无人车对应的第一访问强度大于第二访问强度,控制该无人车访问第二目标子区域,所述第二目标子区域为与该无人车相邻的各个无人车中对应的占据的区域最大的无人车所占据的子区域;若该无人车对应的第一访问强度不大于第二访问强度,控制该无人车访问第三目标子区域,所述第三目标子区域为与该无人车相邻的无人车所占据的子区域;在所述循环周期结束时,确定所述目标区域是否被均匀划分;如果是,确定各个子区域所属的无人车信息和各个子区域对应的访问强度信息,得到各个所述无人车对应的至少一个子区域;如果否,当进入下一个循环周期时,返回执行所述获取各个无人车对应的区域划分信息和各个无人车针对各个子区域的访问强度信息的步骤。
32、根据本公开的第三方面,提供了一种电子设备,包括:
33、至少一个处理器;以及
34、与所述至少一个处理器通信连接的存储器;其中,
35、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开所述的方法。
36、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行本公开所述的方法。
37、本公开的控制方法、装置、设备及存储介质,获取目标区域,并对目标区域进行划分得到对应的多个子区域;获取各个无人车针对多个子区域的访问强度信息,并基于访问强度信息确定各个无人车对应的至少一个子区域;针对每个无人车,根据该无人车对应的各个子区域的指定位置信息,确定该无人车对应的目标行驶路径。即通过各个无人车针对多个子区域的访问强度信息实现对共同作业于同一片区域的多个无人车的控制,保证了无人车的作业效率。
38、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!