一种无人船避障控制系统的制作方法
本发明涉及无人船,尤其涉及一种无人船避障控制系统。
背景技术:
1、随着人类对海洋资源的重视程度加剧,需要越来越频繁地对海洋进行巡视探索,无人船是一种无需遥控,借助卫星定位和自身传感器即可按照预设路线在水面航行的全自动水面机器人,在航行过程中可根据设置在船体的各类传感器完成对障碍物的适应性避障,针对无人船的避障控制系统也需要适应复杂的海洋环境,相关领域技术人员也在对无人船的避障控制系统进行更加精确化以及智能化的研究,使无人船更加满足生产以及科研的需求。
2、中国专利公开号:cn115328122a,该发明提供了一种基于多雷达感知的无人船避障方法及系统,其中,方法包括:步骤1:动态获取无人船上设置的多雷达对水域中周边环境进行感知获得的点云数据包;步骤2:获取辅助构建信息,基于辅助构建信息和点云数据包,构建动态三维场景模型;步骤3:基于动态三维场景模型,规划避障行驶路线;步骤4:基于所述避障行驶路线,控制无人船进行避障行驶,该发明的基于多雷达感知的无人船避障方法及系统,基于雷达动态获取的点云数据包和辅助构建信息,构建动态三维场景模型,提升了场景构建的实时性;在动态三维场景模型中规划避障行驶路线,无需人工遥控避障,降低了人力成本,同时,提高了避障的精确性,但是,该发明的场景模型构建缺乏对固定障碍物以及移动障碍物的区分,且在基于规划好的避障行驶路线上行驶时未考虑海洋复杂环境对行驶路线的影响。
3、现有技术中还存在以下问题,
4、1、现有技术中,未考虑对固定障碍物以及不同移动速度的漂浮障碍物采取不同的避障方式,导致避障方式单一;
5、2、现有技术中,未考虑海况、水流等因素在无人船避障过程中对无人船避障轨迹的影响,影响避障控制系统的避障效果。
技术实现思路
1、为此,本发明提供一种无人船避障控制系统,用以克服现有技术中没有对固定障碍物以及不同移动速度的漂浮障碍物采取不同的避障方式导致的避障方式单一以及容易受海况、水流等因素影响避障控制系统的避障效果的问题。
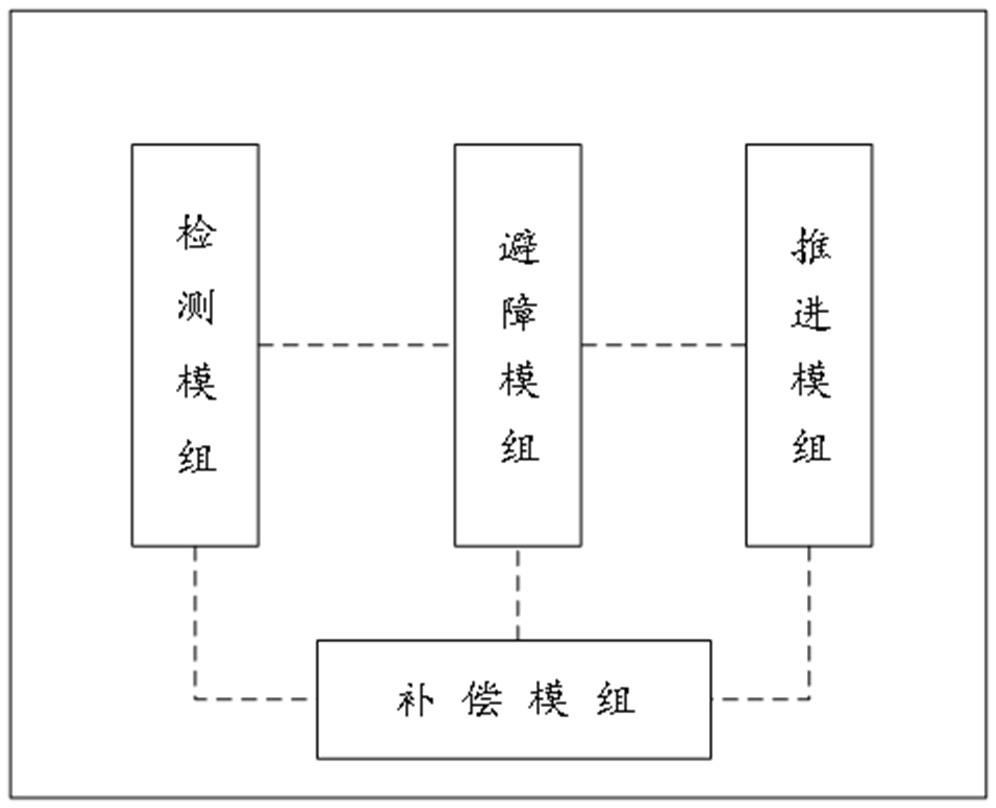
2、为实现上述目的,本发明提供一种无人船避障控制系统,包括:
3、检测模组,其包括设置在无人船前端用以检测所述无人船周围是否有障碍物以及检测所述障碍物的移动速度的雷达单元,设置在所述无人船四周用以采集海浪推进方向以及海浪高度的视觉单元;
4、推进模组,其包括设置在所述无人船尾部且推进速率以及推进方向可控的第一发动机组以及设置在所述无人船侧部且推进速率以及推进方向可控的第二发动机组;
5、避障模组,其与所述检测模组以及推进模组连接,包括相互连接的分析单元以及控制单元,所述分析单元用以在第一预设条件下,判定障碍物状态,所述障碍物状态包括固定障碍物状态以及漂浮障碍物状态;
6、所述控制单元用以基于所述障碍物状态以及障碍物的移动速度判定所述无人船的避障方式,其中,
7、第一避障方式为确定绕行轨迹,控制所述推进模组改变推进方向以及推进速率以使所述无人船沿所述绕行轨迹航行;
8、第二避障方式为控制所述推进模组改变推进方向以及推进速率以使无人船保持静止,在第二预设条件下,控制所述推进模组推进所述无人船再次前进;
9、所述第一预设条件为所述雷达单元判定所述无人船周围有障碍物,所述第二预设条件为所述雷达单元判定所述无人船周围没有障碍物;
10、补偿模组,其与所述检测模组、推进模组以及避障模组连接,用以基于所述海浪推进方向与无人船航行方向的偏差夹角以及海浪高度与预设海浪高度阈值的对比结果判定是否需要对所述推进模组的运行参数进行修正,并判定对推进模组的运行参数进行修正时的修正方式,包括,
11、对第一发动机组的推进速率进行修正;
12、或,对第二发动机组的推进方向进行修正。
13、进一步地,所述控制单元还用以在所述雷达单元判定所述障碍物状态为漂浮障碍物状态下,获取所述障碍物的移动速度,并将所述障碍物的移动速度与预设的速度对比值进行比对,根据比对结果判定所述障碍物的速度状态,其中,
14、若所述障碍物的移动速度小于等于所述速度对比值,则所述控制单元判定所述障碍物的速度状态为第一速度状态;
15、若所述障碍物的移动速度大于所述速度对比值,则所述控制单元判定所述障碍物的速度状态为第二速度状态。
16、进一步地,所述控制单元基于所述障碍物状态以及障碍物的移动速度判定所述无人船的避障方式,其中,
17、在第一预设判定条件下,所述控制单元判定所述无人船的避障方式为第一避障方式;
18、在第二预设判定条件下,所述控制单元判定所述无人船的避障方式为第二避障方式;
19、所述第一预设判定条件为所述障碍物状态为固定障碍物状态或所述障碍物状态为漂浮障碍物状态且所述障碍物的速度状态为第一速度状态;
20、所述第二预设判定条件为所述障碍物状态为漂浮障碍物状态,且,所述障碍物的速度状态为第二速度状态。
21、进一步地,所述第一避障方式下的绕行轨迹为围绕所述障碍物的航行轨迹,所述航行轨迹基于所述雷达单元检测到障碍物的宽度确定,所述航行轨迹的曲率与所述障碍物的宽度成正相关。
22、进一步地,所述补偿模组还用以确定所述偏差夹角,其中,所述补偿模组将所述海浪推进方向与无人船航行方向之间的夹角确定为所述偏差夹角。
23、进一步地,所述补偿模组判定是否需要对所述推进模组的运行参数进行修正,其中,
24、所述补偿模组将所述偏差夹角与预设的偏差夹角阈值进行对比,将海浪高度与预设海浪高度阈值进行对比,
25、在预设对比条件下,所述补偿模块判定需要对所述推进模组的运行参数进行修正;
26、在非所述预设对比条件下,所述补偿模块判定不需要对所述推进模组的运行参数进行修正;
27、所述预设对比条件为,所述偏差夹角小于等于所述偏差夹角阈值且所述海浪高度大于预设海浪高度阈值,或所述偏差夹角大于所述偏差夹角阈值。
28、进一步地,所述补偿模组判定对推进模组的运行参数进行修正时的修正方式,其中,
29、若所述偏差夹角小于等于所述偏差夹角阈值且所述海浪高度大于预设海浪高度阈值,或所述偏差夹角处于第一预设区间,则所述补偿模组判定对推进模组的第一发动机组的推进速率进行修正;
30、若所述偏差夹角处于第二预设区间,则所述补偿模组判定对推进模组的第二发动机组的推进方向进行修正;
31、其中,所述第一预设区间为(150°,180°],所述第二预设区间为(30°,150°]。
32、进一步地,所述补偿模组内部设置有若干基于所述偏差夹角以及海浪高度修正所述第一发动机组的推进速率的速率修正方式,
33、各所述速率修正方式对所述第一发动机组的推进速率的修正比例不同。
34、进一步地,所述补偿模组内部设置有若干基于所述偏差夹角确定所述第二发动机组的推进方向的确定方式,各所述确定方式中所确定的推进方向不同。
35、进一步地,所述检测模组内还设置有存储单元,用以存储所述雷达单元以及视觉单元所检测的数据。
36、与现有技术相比,本发明的有益效果为,本发明通过设置检测模组、推进模组、避障模组以及补偿模组,通过避障模组判定障碍物状态为固定障碍物状态或漂浮障碍物状态,基于障碍物状态以及障碍物的移动速度判定无人船的避障方式,包括,控制无人船沿预先确定的绕行轨迹航行,或,控制推进模组改变推进方向以及推进速率以使无人船保持静止,在前方无障碍时再次前进,通过补偿模组基于海浪推进方向与无人船航行方向的偏差夹角以及海浪高度判定对推进模组的运行参数进行修正时的修正方式,包括,对第一发动机组的推进速率进行修正,或,对第二发动机组的推进方向进行修正,进而,实现了对不同状态以及移动速度的障碍物采取不同的避障方式,减少了海况、水流等因素对避障效果的影响,避障方式的多样性提高了避障控制系统的适应性,修正方式的引入提升了系统的避障效果。
37、进一步地,本发明通过避障模组判定障碍物状态,在实际情况中,障碍物状态可以为海面上固定的礁石,也可以为漂浮的杂物,不同类型的障碍物具有不同的特征,进而,便于系统对不同障碍物采取不同的避障方式。
38、进一步地,本发明基于障碍物状态以及障碍物的移动速度判定所述无人船的避障方式,在实际情况中,对于固定状态的障碍物需要系统规划绕行轨迹,并控制无人船沿绕行轨迹进行避障,对于漂浮状态的障碍物,需要获取障碍物的移动速度,移动速度慢的漂浮障碍物也要基于规划好的绕行轨迹进行避障,移动速度快的漂浮障碍物变化情况多端,规划的绕行路线很难适用,可以控制无人船保持静止,待障碍物快速移出对无人船的航行方向造成影响的区域,无人船的雷达单元检测航行方向没有障碍物时再按航行方向行进,进而,实现了对固定障碍物以及不同移动速度的漂浮障碍物采取不同的避障方式,提高了避障控制系统的适应性。
39、进一步地,本发明通过补偿模组判定是否需要对推进模组的运行参数进行修正,在实际情况中,海况、水流等因素在无人船避障过程中对无人船避障轨迹的影响,海浪的推进方向与无人船的航行方向之间存在偏差夹角,偏差夹角在不同的角度区间对无人船的航行方向造成的影响不同,在偏差夹角小于等于30°且海浪高度较低时,对航行方向造成的影响较小,可以不去调整推进模组的运行参数,但在海浪高度较高时,海浪的起伏会导致无人船前进方向的速度向量被分解至海浪起伏方向,在无人船向心加速度的作用下容易偏航,需要调整推进模组的运行参数,在偏差夹角大于30°时,对航行方向造成的影响较大,需要调整推进模组的运行参数,以避免无人船避障过程中海况、水流等因素对无人船避障轨迹的影响。
40、进一步地,本发明通过补偿模组基于偏差夹角判定对推进模组的运行参数进行修正时的修正方式,在实际情况中,由于偏差夹角较大,需要对无人船的航行方向进行调整,偏差夹角在不同的角度区间对无人船的航行方向造成的影响不同,在偏差夹角在(30°,150°]的状态下,海浪推进方向容易使无人船左右偏出原先的航行方向,此时需要设置在船体侧部的第二发动机组对无人船的左右方向进行修正,在偏差夹角在(150°,180°]的状态下,海浪推进方向容易使无人船前进的推进速率受到阻碍,进而影响沿避障轨迹的航行,此时需要修正第一发动机组的推进速率,并且,本发明考虑了海浪高度对航行的影响,海浪高度会对航行方向的速度向量产生抵消,本发明进而基于海浪高度对应的修正第一发动机组的推进速率,进而提升了系统的避障效果。
41、进一步地,本发明通过补偿模组确定对第一发动机组的推进速率的速率修正方式以及对第二发动机组的推进方向的方向修正方式,在实际情况中,由于偏差夹角的大小不同,对无人船的航行方向造成的影响程度也不同,所以需要确定对第一发动机组的推进速率的修正比例以及第二发动机组的推进方向,以使补偿单元控制推进模组的运行参数,减少了海况、水流等因素在无人船避障过程中对无人船避障轨迹的影响,提升了系统的避障效果。
- 还没有人留言评论。精彩留言会获得点赞!