一种基于故障诊断与容错控制的姿态动力学建模方法与流程
本发明属于运载火箭控制领域,涉及在运载火箭伺服机构故障情况下,一种故障诊断与容错控制的姿态动力学建模方法。
背景技术:
1、运载火箭飞行过程中,通过伺服机构驱动发动机摆动,以达到对俯仰、偏航和滚动通道控制的目的。目前运载火箭设计时都没有考虑伺服机构故障情况下的控制,一旦出现故障只能被动的进行克服,极易导致姿态发散。新一代运载火箭的研制过程中,开始考虑伺服机构故障情况下的控制。在伺服故障卡滞、松浮、损伤等故障模式下,通过故障下的姿态动力学建模,并进行有效的摆角分配,能够实现火箭伺服机构在一定故障程度下的火箭姿态稳定。
技术实现思路
1、为了解决上述问题,本发明所采取的技术方案是:提出一种基于故障诊断与容错控制的姿态动力学建模方法,通过摆角分配,建立了基于实际摆角的绕质心动力学方程、三通道耦合弹性振动方程。分析了这种建模方法对于伺服机构故障的适应性。
2、包括步骤:
3、步骤1:分析运载火箭伺服故障模式;
4、步骤2:芯级和助推等效摆角的分配方法;
5、步骤3:对伺服故障状态下的绕质心动力学方程的建模;
6、步骤4:对伺服故障状态下的三维弹性振动方程建模;
7、步骤5:验证基于故障的姿态动力学模型对于伺服故障的适应性。
8、优选地,基于故障诊断与容错控制的姿态动力学建模方法能够适应伺服机构卡滞、松浮、损伤等故障模式。即适应伺服机构卡死在某个角度、伺服机构不受控制和伺服机构只能部分跟踪摆角指令的情况。
9、优选地,基于故障诊断与容错控制的姿态动力学模型需要按照实际摆角进行建模,因此需要进行芯级与助推摆角指令分配、等效摆角与实际摆角进行分配。
10、
11、
12、
13、
14、
15、
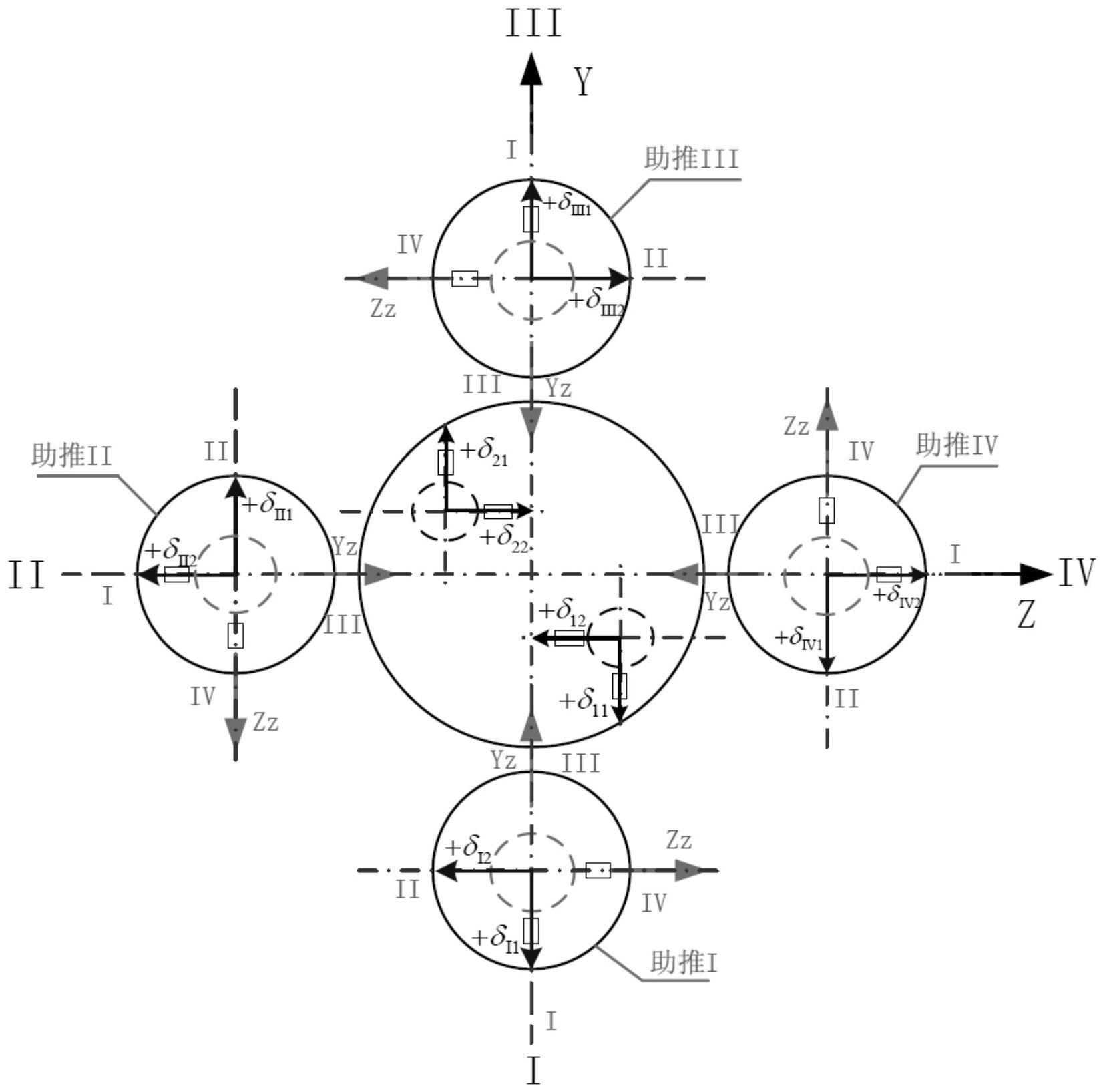
16、其中,δψxj、δγxj为芯级的三通道等效摆角;δψzt、δγzt为助推的三通道等效摆角;δij,i=i…iv,j=1,2为四个助推的实际摆角;δmn,m=1,2,n=1,2为二个芯级的实际摆角。
17、优选地,建立基于实际摆角的三通道绕质心动力学方程,该方程能够实现伺服机构卡滞、松浮、损伤等故障模式下对姿态影响的分析。
18、
19、
20、
21、其中,ωx、ωy、ωz为绕质心角速度,d1、为刚体系数,为弹性系数、mxpj、为晃动系数。
22、优选地,建立基于实际摆角的三通道耦合弹性振动方程,该方程能够实现伺服机构卡滞、松浮、损伤等故障模式下弹性信号的抑制。
23、
24、其中,qi为广义坐标,ξi弹性阻尼,ωi为弹性频率,d1i、d1i、d2i、(m=i…iv,n=1…2)为刚体参数。rij、r′ij、为弹性模态间的交联系数。为广义力系数。kipj、k(i+n)pj、为弹晃交联系数。
25、优选地,基于故障诊断与容错控制的姿态动力学建模方法,通过在实际摆角处加故障的方式,实现了伺服机构卡滞、松浮、损伤等故障模式的影响分析。
26、本发明的有益效果:本发明提出的一种运载火箭伺服机构故障情况下的姿态动力学建模方法。该方法能够分析伺服机构在卡滞、松浮、损伤等故障模式对姿态控制系统的影响。
技术特征:
1.一种基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,包括步骤:
2.如权利要求1所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述步骤1中运载火箭伺服故障模式包括所述建模方法能适应伺服机构卡滞、松浮、损伤故障模式。
3.如权利要求2所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述伺服机构卡滞是指伺服机构卡死在某个角度;伺服机构松浮是指伺服机构不受控制,无法跟踪摆角指令;伺服机构损伤是伺服机构只能部分跟踪摆角指令。
4.如权利要求1所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述步骤2中,芯级和助推等效摆角分配方法包括:摆角分配分成两个部分,一是芯级和助推按照一定的比例进行摆角分配,摆角分配的比例系数依据芯级和助推的实际最大摆角确定;二是芯级和助推的等效摆角分配到实际摆角。
5.如权利要求4所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述步骤2具体方法包括:
6.如权利要求1所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述步骤3中,伺服故障状态下的绕质心动力学方程的建模时,将等效摆角化为实际摆角,并给出绕质心动力学方程,三通道绕质心动力学方程如下:
7.如权利要求1所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述步骤4中,伺服故障状态下的三维弹性振动方程建模包括:三维弹性振动方程建模时考虑空间弹性模态,为三通道耦合的弹性振动方程,方程中有关摆角的项,将等效摆角化为实际摆角,三维弹性振动方程如下:
8.如权利要求1所述基于故障诊断与容错控制的姿态动力学建模方法,其特征在于,所述步骤5中,建立基于故障诊断与容错控制的姿态动力学模型后,伺服机构卡滞、松浮、损伤故障模式下均能分析其对姿态、弹性振动的影响,能够分析单台或多台伺服机构不同故障情况下的适应性。
技术总结
本发明涉及在运载火箭伺服机构故障情况下,一种基于故障诊断与容错控制的姿态动力学建模方法,属于运载火箭控制领域,包括:1运载火箭伺服故障模式;2芯级和助推等效摆角的分配;3伺服故障状态下的绕质心动力学方程的建模;4伺服故障状态下的三维弹性振动方程建模;5基于故障的姿态动力学模型对于伺服故障的适应性。本发明所述的运载火箭伺服机构故障情况下的基于故障诊断与容错控制的姿态动力学建模方法,满足运载火箭伺服机构故障下的姿控系统设计与分析,实现了伺服机构故障情况下的运载火箭控制。
技术研发人员:张卫东,刘玉玺,修观,薛宇,张开宝
受保护的技术使用者:上海宇航系统工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!