基于李群空间的无人机姿态几何PID控制方法及系统
本发明属于无人机飞行控制,具体涉及一种基于李群空间的无人机姿态几何pid控制方法及系统。
背景技术:
1、无人机具有机动灵活、获取信息方便等优点,在航空、军事、科学研究、航拍摄影、物流和救援等许多领域得到广泛应用。无人机的组成包括飞行控制器、传感器、执行器等多个硬件模块。为实现对于无人机的控制,需要对非线性动态系统做深入的结构分析,并基于其动态方程的结构设计符合要求的控制器。
2、无人机运动过程中,表示姿态的三维特殊旋转矩阵满足李群结构,可运用李群的运动方程描述无人机的姿态运动;其转动角速度满足欧拉刚体运动方程,该方程是力学系统中典型的非线性被控对象。相对于欧拉角和四元数等其它姿态建模方法,基于李群空间的姿态建模具有全局描述和无歧义描述的优势。在现有控制算法的研究中,经典的控制算法如pid控制、lqr控制、观测器控制和mpc控制等方法均被用于该力学模型的控制,并取得了一定的技术效果;通过鲁棒控制和自适应控制,控制器对于不确定性和鲁棒性以及对于动态环境的适应性得到了明显提升。虽然上述控制方法(特别是传统pid控制)可以被应用于基于欧拉角或四元数描述的刚体运动系统,但未能获得李群空间全局描述的优势,也无法消除姿态描述的歧义性。为实现基于李群空间描述的姿态控制,需要对基于欧几里得空间设计的传统pid进行改造,设计一种能够适用于非线性空间的几何pid控制器。基于此,本发明提出了一种基于李群空间的无人机姿态几何pid控制方法及系统。
技术实现思路
1、针对现有技术的不足,本发明提出了一种基于李群空间的无人机姿态几何pid控制方法及系统。本发明运用三维特殊正交群描述无人机姿态,根据欧拉刚体方程建立受控无人机的动力学模型,设计无人机姿态的几何pid控制,实现对无人机姿态的精确控制。本发明能够消除稳态误差,具有鲁棒性强、响应速度快、控制器结构简单和易调节的优势。
2、本发明具体技术方案如下:
3、一种基于李群空间的无人机姿态几何pid控制方法,其包括如下步骤:
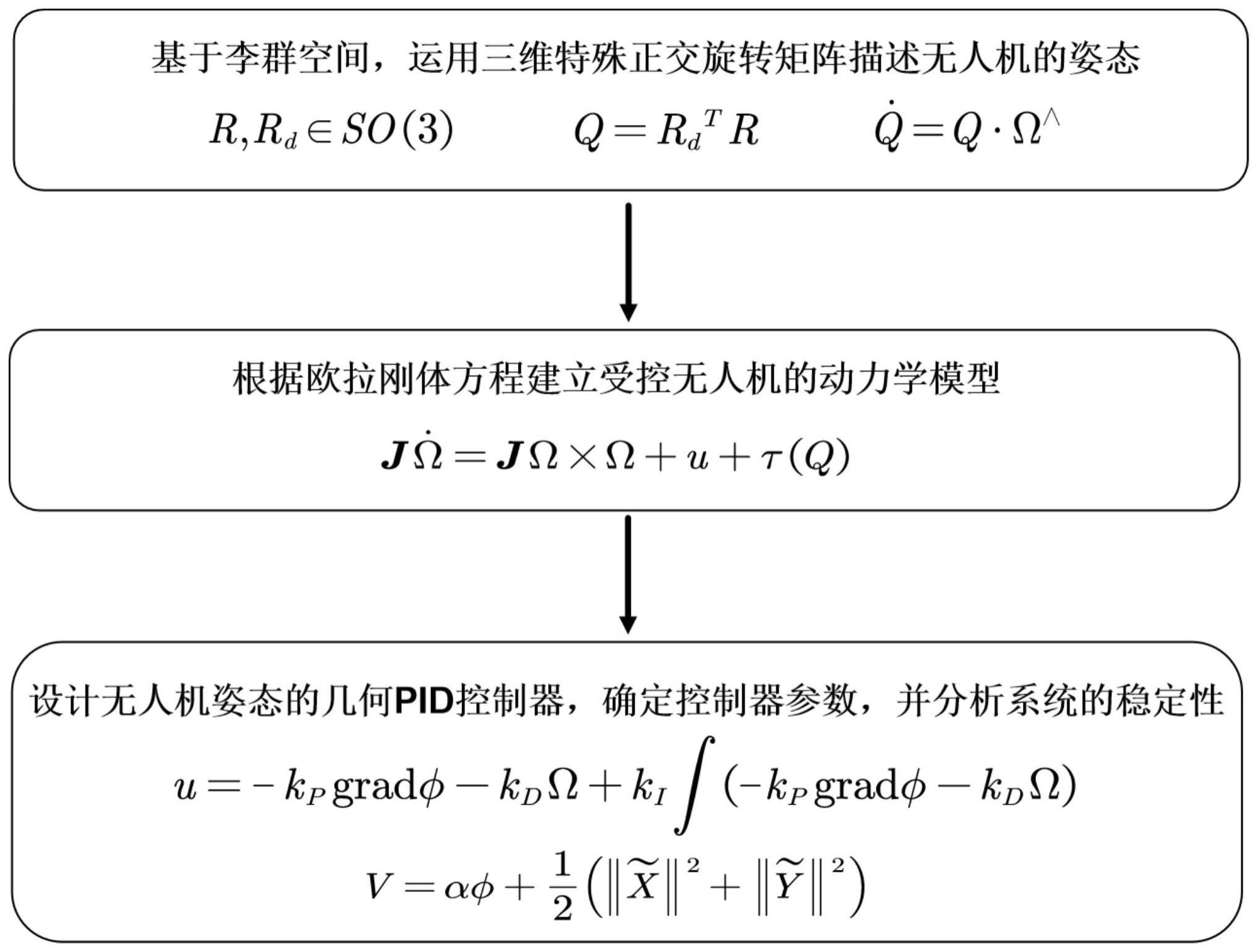
4、步骤s1,基于李群空间,运用三维特殊正交旋转矩阵描述无人机的姿态;
5、步骤s2,根据李群空间的运动学方程和欧拉刚体运动方程建立受控无人机的动力学模型;
6、步骤s3,设计无人机姿态的几何pid控制器,确定控制器参数,并分析模型的稳定性。
7、优选的,步骤s1具体包括:
8、用so(3)表示三维特殊正交群,该群满足李群的结构,即满足封闭性和结合律,存在单位元和逆元。用三维旋转矩阵r∈so(3)表示无人机姿态,则有:
9、
10、
11、存在单位元e=i,i为单位矩阵;逆元为
12、设目标姿态为rd∈so(3),受控无人机姿态为r∈so(3),则相对姿态为q=rdtr∈so(3),无人机姿态控制目标为使得r趋向于rd,即q趋向于i。
13、优选的,步骤s2具体包括:
14、根据李群空间描述可得姿态的运动方程:
15、
16、其中,为向量在李代数关系下对应的反称矩阵。三维向量和反称矩阵之间可以相互转换。
17、通过运算(·)∧可将三维向量转化为对应的反称矩阵:
18、
19、通过运算(·)∨可将反称矩阵转化为对应的三维向量:
20、
21、根据欧拉刚体运动方程得无人机动态模型:
22、
23、其中,j=diag{j1,j2,j3},惯性矩阵对角线上的惯性矩j1,j2,j3可以理解为刚体绕x,y,z轴旋转的转动惯量。u为力矩的控制输入,可由控制器给出,τ(q)为与q有关的扰动项。
24、优选的,步骤s3具体包括:
25、几何pid控制器的表达式为:
26、u=-kpgradφ-kdω+kiui
27、
28、其中,-kpgradφ为比例项,正比于梯度向量-kdω为微分项,kiui为积分项。kp,kd,ki>0为控制器参数,为误差函数,tr(·)表示矩阵的迹。比例项使姿态收敛至目标状态;微分项用于减轻震荡,提高收敛速度;积分项用于消除稳态误差,提高系统鲁棒性。
29、确定控制器参数的过程为:首先,选择充分大的kd;其次,增大kd使得β=kp/kd足够大;最后,选择ki=γkd,其中
30、将u的式子代入欧拉刚体运动方程得受几何pid控制器的无人机动力学模型:
31、
32、为分析模型的稳定性,需对模型做变量替换,选取变量x,y
33、x=-kpgradφ-kdω,y=kiui+ub
34、其中,ub=τ(q)+jω×ω为模型所有扰动项之和。对模型做进一步的变量替换:
35、其中,k1,k2为3×3的对角矩阵,且对角线元素均为正。k1,k2满足特征方程:
36、k2-k+γj=0
37、解该特征方程可求得:
38、
39、
40、根据新的变量,结合模型的势能函数,可构造李雅普诺夫函数:
41、
42、由可知,李雅普诺夫函数单调递减至零,模型逐渐收敛到期望的目标状态并保持该状态,模型的稳态误差被积分项抵消,即(r,ω,kiui+ub)趋向于(rd,0,0)。
43、本发明还公开了一种基于李群空间的无人机姿态几何pid控制系统,基于上述方法,其包括如下模块:
44、无人机姿态描述模块:基于李群空间,运用三维特殊正交旋转矩阵描述无人机姿态;
45、无人机动力学模型建立模块:根据李群空间的运动学方程和欧拉刚体运动方程建立受控无人机的动力学模型;
46、几何pid控制器建立模块:设计无人机姿态的几何pid控制器,确定控制器参数,并分析稳定性。
技术特征:
1.基于李群空间的无人机姿态几何pid控制方法,其特征在于包括如下步骤:
2.如权利要求1所述的基于李群空间的无人机姿态几何pid控制方法,其特征在于,步骤s1具体包括:
3.如权利要求2所述的基于李群空间的无人机姿态几何pid控制方法,其特征在于,步骤s2具体包括:
4.如权利要求3所述的基于李群空间的无人机姿态几何pid控制方法,其特征在于,步骤s3具体中:
5.如权利要求4所述的基于李群空间的无人机姿态几何pid控制方法,其特征在于,步骤s3具体中,确定控制器参数的过程为:
6.基于李群空间的无人机姿态几何pid控制系统,基于权利要求1所述的方法,其特征在于包括如下模块:
技术总结
本发明公开了一种基于李群空间的无人机姿态几何PID控制方法及系统,本发明方法包括如下步骤:S1,基于李群空间,运用三维特殊正交旋转矩阵描述无人机姿态;S2,根据李群空间的运动学方程和欧拉刚体运动方程建立受控无人机的动力学模型;S3,设计无人机姿态的几何PID控制器,确定控制器参数,并分析稳定性。本发明的无人机姿态几何PID控制方法及系统能够消除稳态误差,具有较好的鲁棒性;控制器结构简单,易调节。
技术研发人员:张志飞,刘国威,李津蓉,齐帅,赵海涛,杜静
受保护的技术使用者:浙江科技学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!