一种基于长短时神经网络的导弹故障识别方法与流程
本发明涉及一种基于长短时神经网络的导弹故障识别方法,属于飞行器故障在线诊断领域。
背景技术:
1、随着飞行任务复杂度的提高,导弹控制系统的复杂程度日益增加,飞控系统的可靠性和稳定性变得尤其重要,执行机构的故障是造成导弹失控的重要原因之一,故障产生的基本原因有部件结构损坏、功能丧失等。为了减少这种事故发生或者降低因此引起的损失,确保导弹系统运行过程中对出现故障的容错能力,是现代导弹设计的有一个重要考虑因素。在导弹飞行过程中,如果执行机构中一个或者多个执行器出现故障,使得导弹出现了设计之外的异常状况,飞控接收到的信息与当前实际状态信息差异很大,使得控制律输出的指令和各舵面的偏转值产生偏差,严重影响飞行的安全性。为了确保导弹能够稳定飞行,并完成预定的飞行任务要求,需要对出现异常状况(即故障)的导弹进行重构设计。导弹在出现故障条件下,确保系统能完成稳定飞行和飞行品质任务,这将大大增强导弹作战使用的可靠性和鲁棒程度。然而,执行机构故障(增益损失、卡死等)会使得导弹的飞行动力学特性将变得更为复杂,导致动力学模型呈现强非线性等特性,因此,需要及时地对故障进行识别与处理,尽可能抑制故障和外部干扰的影响。
技术实现思路
1、本发明解决的技术问题是:针对目前现有技术中,缺少能够快速准确可靠识别故障类型的技术的问题,提出了一种基于长短时神经网络的导弹故障识别方法。
2、本发明解决上述技术问题是通过如下技术方案予以实现的:
3、一种基于长短时神经网络的导弹故障识别方法,包括:
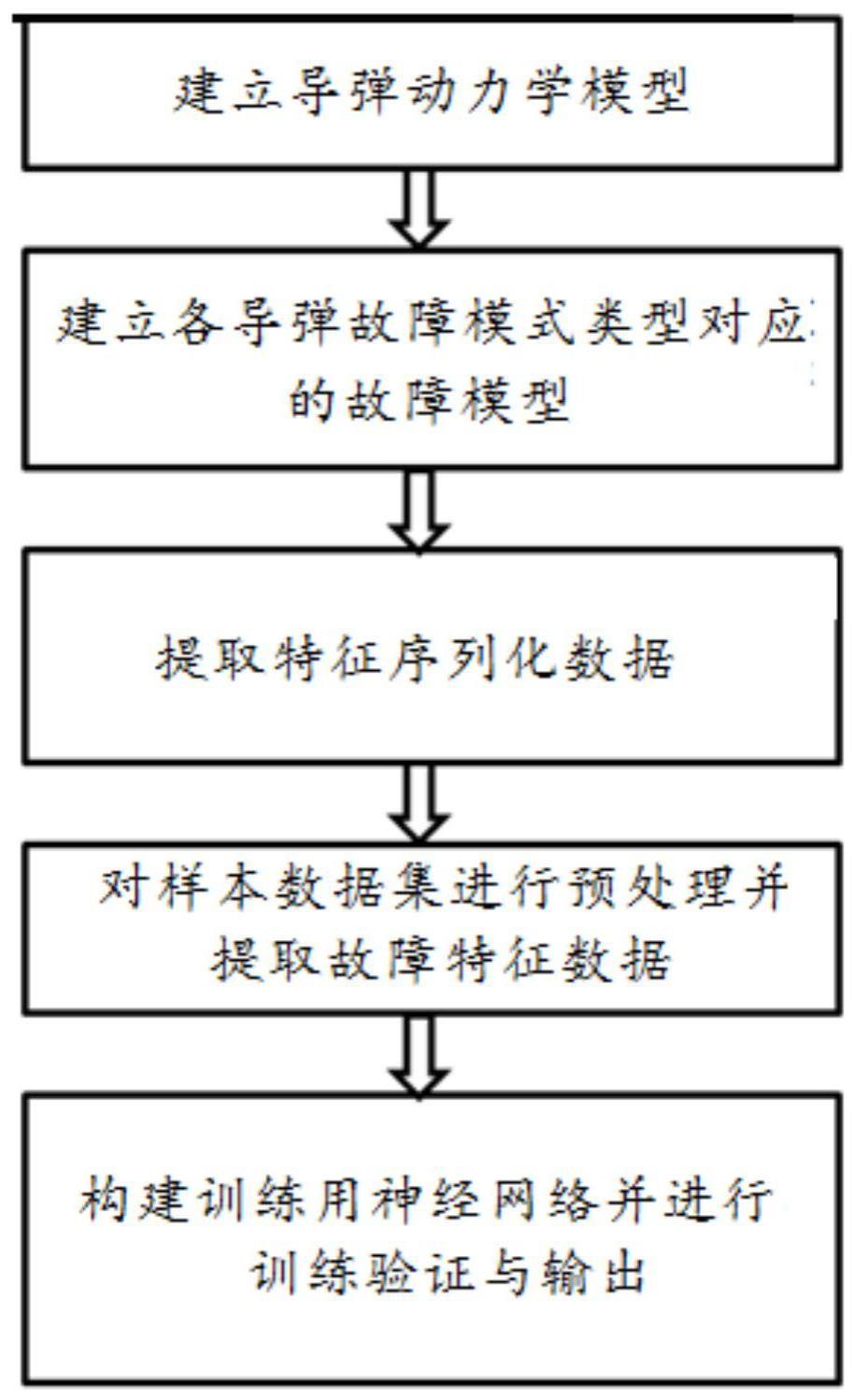
4、建立导弹动力学模型;
5、建立各导弹故障模式类型对应的故障模型;
6、根据导弹故障模式类型分别将对应的各故障模型装载于导弹动力学模型中,采集导弹动力学模型输出的状态量数据、控制量数据,并提取特征序列化数据作为样本数据集;
7、对样本数据集进行预处理,并根据导弹故障模式类型,提取故障特征数据,利用故障特征数据将样本数据集划分训练集数据和测试集数据;
8、构建训练用神经网络,利用训练集数据训练训练用神经网络,利用测试集数据对训练后神经网络进行验证,利用通过验证的训练后神经网络对导弹故障数据进行识别。
9、所述导弹动力学模型具体为:
10、
11、
12、
13、
14、
15、
16、
17、[δx,δy,δz]=g(δxc,δyc,δzc)
18、式中,α,β,γ表示弹体攻角,侧滑角,滚转角,ωx,ωy,ωz表示导弹绕弹体x,y,z轴的转动角速度,jx,jy,jz表示导弹绕弹坐标轴转动惯量,δx,δy,δz表示副翼通道舵偏角,俯仰通道舵偏角,偏航通道舵偏角;q表示动压头,v表示导弹速度,s表示导弹参考面积,l表示导弹特征长度,p表示发动机推力,m表示导弹质量;表示攻角升力系数,侧滑角侧力系数,表示俯仰舵升力系数,偏航舵侧力系数,mx,my,mz表示x,y,z轴方向的操纵力矩系数,f()表示气动包函数,由实际舵面偏转角度和相关状态量作为输入,输出相关气动参数,others表示气动包所需要的其他状态量,g()表示舵面故障模式函数,δxc,δyc,δzc表示三个通道的舵面指令,不同的故障下g()不同,导致实际的舵面输出由故障模式和舵面指令共同决定。
19、导弹故障模式包括:卡死故障、控制效能损失故障、漂浮故障,导弹故障模式均为导弹舵机故障,通过建立故障模型进行描述,包括卡死故障模型、控制效能损失故障模型、漂浮故障模型。
20、卡死故障,当导弹舵机舵面固定于任意位置且无法正常响应偏转指令时,舵机不受舵面偏转指令影响且仅能提供固定力矩;卡死故障模型具体为:
21、δk=常数,k∈[1,4]
22、式中,δk为实际输出的舵面偏角,当为常数时,表示第k片舵面发生卡死故障,舵机共4片舵面。
23、控制效能损失故障,当舵面接收偏角指令后,舵面恒增益系数变化,实际输出力矩与偏角指令对应的输出力矩不同;控制效能损失故障模型具体为:
24、δkc=λδk
25、式中,λ是恒增益变化的比例系数为常数,δkc为第k个舵面的偏角指令,δk为实际输出的舵面偏角。
26、漂浮故障,舵面无法响应舵偏指令,处于漂浮状态,无有效输出力矩;
27、δk=rand(δmin,δmax),k∈[1,4]
28、式中,δmin是舵发生故障时,舵面可偏转的最低极限,δmax为舵发生故障时,舵面可偏转的最高极限,δk为实际输出的舵面偏角,rand()函数表示随机抽样。
29、获取样本数据集的方法为:
30、将各类导弹故障模式模型加载至导弹动力学模型中,利用导弹故障模式作为激励输入,提取导弹动力学模型输出的各类导弹故障模式下的导弹动力学数据中的导弹的状态量数据、控制量数据;
31、提取状态量数据、控制量数据中的特征序列化数据作为样本数据集。
32、对样本数据集进行预处理并提取故障特征数据的方法为:
33、对样本数据集进行预加重处理,提取包含故障特征数据的参数并进行平滑滤波;
34、对平滑滤波输出数据进行加窗处理,获取经过加窗处理后的样本数据;
35、对加窗处理后的样本数据进行自相关分析,获取故障特征数据。
36、采用lstm神经网络作为训练用神经网络,以当前状态的hh-1、xt作为输入数据,lstm神经网络具体为:
37、ft=σ(wf[ht-1,xt]+bf)
38、it=σ(wi[ht-1,xt]+bi)
39、
40、
41、ot=σwo[ht-1,xt]+bo)
42、ht=ot*tanh(ct)
43、式中,h(t)表示lstm网络中的隐层状态,wf[],wi[],wo[],wc[]表示权重分配,bf,bi,bo,bc代表偏置,均为需要训练的参数,ft,it,ct为各个门控单元的输出,用来形成对样本数据的记忆,ot表示网络的输出,σ代表sigmoid的非线性映射,当前状态的hh-1表示上一时刻隐函层神经元权值信息、xt表示训练集数据中每种故障模型下,进行阶跃激励响应得到的9个特征的时序变化数据;lstm神经网络经过训练集数据训练后,调整优化神经网络内部的连接权值直到满足设定精度后获得训练后神经网络。
44、利用测试集数据对训练后神经网络进行验证,向训练后神经网络输入测试集数据获取输出测试数据,根据输出测试数据与故障特征数据进行对比,判断当前时刻出现的导弹故障模式类型。
45、本发明与现有技术相比的优点在于:
46、(1)本发明提供的一种基于长短时神经网络的导弹故障识别方法,采用长短时循环神经网络,对故障条件下的状态量响应进行学习,利用滤波,加窗等方法对样本数据进行处理,实现典型机构故障类型的故障诊断,为导弹的容错飞行控制提供关键技术参考,针对故障信息的非线性,非平稳性等特点,强化了特征的故障表征能力。通过lstm神经网络的“门”结构对故障特征进行序列化数据学习。通过对这种时间先后信息的学习,进一步深化故障的特征表达,只需要测量状态量特征变化,就可以实现故障的诊断,省去布置众多专用传感器的成本,在大大减少成本的情况下还能保持较高的辨识精度。
47、(2)本发明采用的基于长短时神经网络进行执行机构故障模式识别方法,可以用来故障的识别,对比现有的方法需要大量传感器进行测量,该方法只需利用状态量的响应即可实现故障的快速辨识,利用较少的资源实现较高的辨识精度。
- 还没有人留言评论。精彩留言会获得点赞!