一种海上风电场的无人巡检平台及巡检方法与流程
本发明涉及海上风电智能巡检,具体涉及一种海上风电场的无人巡检平台及巡检方法。
背景技术:
1、由于海上具有风能流动基本不受地形地貌等因素的影响、风速更高以及风能资源更丰富等特点,海上风电与陆上风电相比,可以获取更稳定的风能,更大的风电机组单机容量以及更高的发电效率,所以近年来,海上风电场的建设呈现持续快速增长的局面。但同时,海上风电场建成后的巡检也会更复杂,成本也更高,同时还伴有一定的风险性。
2、当前,海上风电的巡检主要还是依靠人工检测,需要运维人员乘船出海,存在成本高,效率低,风险大等问题,并且在海况较差,运维人员长时间高负荷工作的情况下,容易出现巡检覆盖不全,关键区域遗漏等情况。
技术实现思路
1、有鉴于此,本发明提供了一种海上风电场的无人巡检平台及巡检方法,以解决通过人工进行海上风电的巡检存在效率低和准确性差的问题。
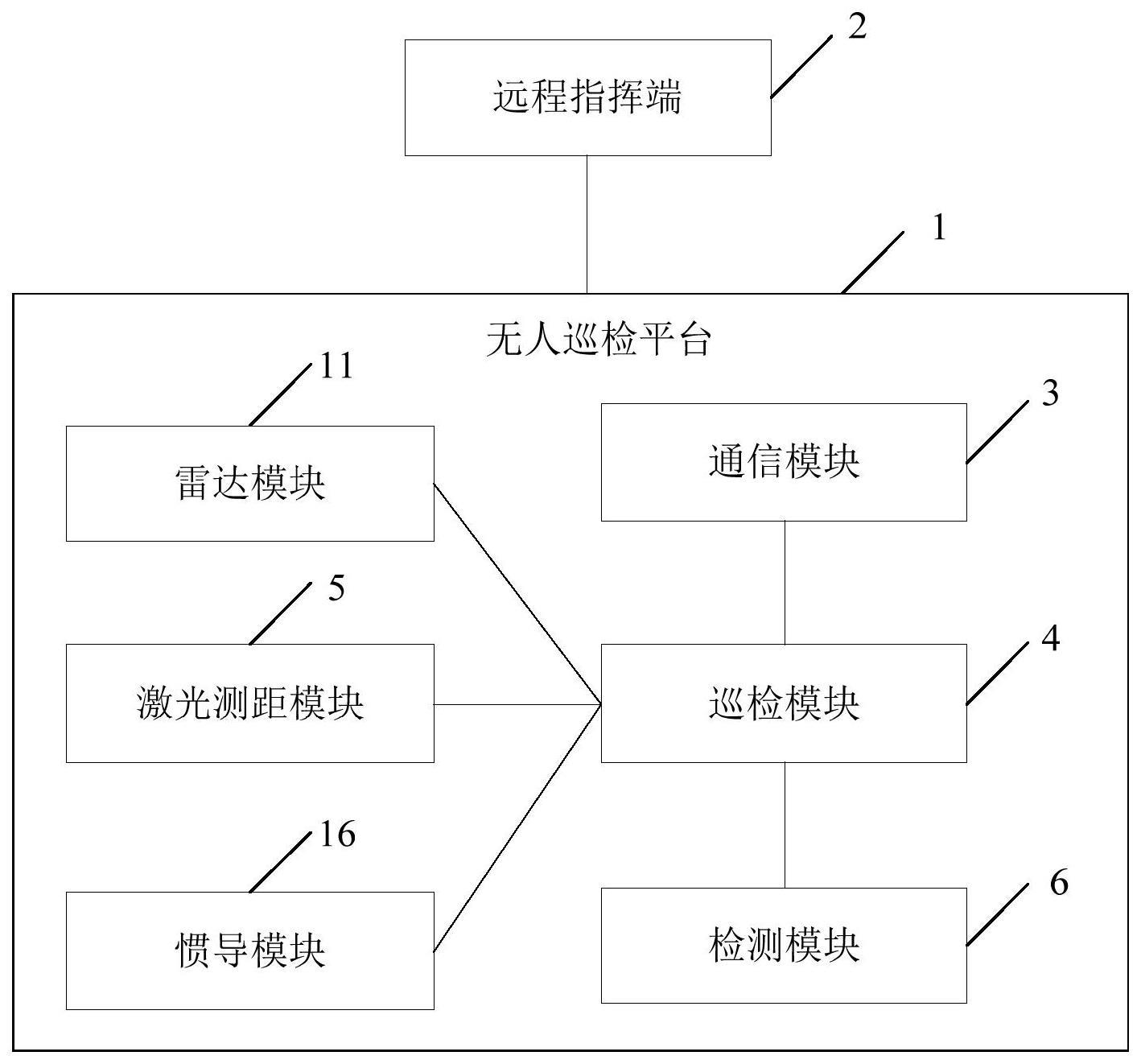
2、第一方面,本发明提供了一种海上风电场的无人巡检平台,无人巡检平台和远程指挥端无线连接,无人巡检平台包括:
3、通信模块,用于获取远程指挥端传输的海上风电场中的风机位置信息;
4、巡检模块,与通信模块连接,用于接收风机位置信息,根据风机位置信息确定巡检路线,并控制无人巡检平台按照巡检路线进行航行;
5、激光测距模块,与巡检模块连接,用于测量无人巡检平台与目标风电塔筒的距离,当无人巡检平台与目标风电塔筒的距离等于预设距离时,向巡检模块发送告警信号;
6、巡检模块,还用于接收告警信号,基于告警信号停止前进,并以目标风电塔筒为中心进行圆周运动,直至绕行一周后,基于巡检路线进行航行;
7、检测模块,与巡检模块连接,用于对巡检路线中的目标风电塔筒进行检测,生成风机巡检信息,并将风机巡检信息通过通信模块发送给远程指挥端进行分析存储。
8、本发明提供的一种海上风电场的无人巡检平台,针对风电场区域大,海上环境复杂,人为巡检成本高、效率低、风险大等特点,通过通信模块、巡检模块、激光测距模块和检测模块之间的交互,无需人工干预即可完成海上风电场的巡检任务,相比传统的风电场巡检,可以有效地降低人为风险,提高巡检效率和准确性。
9、在一种可选的实施方式中,巡检模块,包括:
10、控制子模块,用于接收风机位置信息和告警信号,根据风机位置信息确定巡检路线,并基于巡检路线生成第一控制信号,基于告警信号生成第二控制信号;
11、动力子模块,与控制子模块连接,用于接收第一控制信号和第二控制信号,基于第一控制信号驱动无人巡检平台按照巡检路线进行航行,并基于第二控制信号停止前进,并以目标风电塔筒为中心进行圆周运动,直至绕行一周后,基于巡检路线进行航行。
12、本发明提供的一种海上风电场的无人巡检平台,通过控制子模块和动力子模块可以实现对无人巡检平台巡检的自主控制,全程无需人工干预完成相应的巡检任务,可以有效缩短巡检周期,降低人员安全风险,从而达到节约运维成本的目的。
13、在一种可选的实施方式中,通信模块,包括:
14、无线数传子模块,用于将远程指挥端传输的海上风电场中的风机位置信息传输给巡检模块,并将风机巡检信息发送给远程指挥端;
15、北斗子模块,用于获取远程指挥端与无人巡检平台之间的通信距离,当通信距离大于预设阈值时,向远程指挥端发送紧急数据。
16、本发明提供的一种海上风电场的无人巡检平台,通过无线数传子模块和北斗子模块实现无人巡检平台与远程指挥端的交互,为后续全自主的路径规划奠定了基础,保证了无人巡检平台的安全性。
17、在一种可选的实施方式中,还包括:
18、雷达模块,与巡检模块连接,用于采集巡检路线中的故障物信息,并将故障物信息传输给巡检模块;其中,巡检模块基于故障物信息在航行中进行避障。
19、本发明提供的一种海上风电场的无人巡检平台,通过雷达模块自主感知外部环境进行自主避障,避免了巡检路线中的安全风险,提高了巡检安全性。
20、在一种可选的实施方式中,雷达模块采用导航雷达或激光雷达。
21、在一种可选的实施方式中,检测模块,包括:
22、光电子模块,用于获取目标风电塔筒的环面图像;
23、水下三维成像子模块,设置在无人巡检平台底部,用于采集水下桩基周围的三维地貌图像,并对水下桩基周围的三维地貌图像进行拼接,生成目标风电塔筒的水底三维图像。
24、本发明提供的一种海上风电场的无人巡检平台,在巡检过程中利用光电子模块和水下三维成像子模块同时对标风电塔筒的水上水下进行全面检查,发现问题更加全面和准确,提高了海上风电场巡检的准确性。
25、在一种可选的实施方式中,光电子模块,包括:
26、高清摄像头,用于基于预设摄像头视场角,在巡检模块圆周运动时对目标风电塔筒进行连续拍照,生成多张目标风电塔筒图像;
27、后端图像处理单元,用于对多张目标风电塔筒图像进行处理,生成目标风电塔筒的环面图像。
28、本发明提供的一种海上风电场的无人巡检平台,通过高清摄像头和后端图像处理单元实现了对目标风电塔筒的水上环面图像的采集与处理,提高了海上风电场巡检的准确性。
29、在一种可选的实施方式中,还包括:
30、惯导模块,与所述巡检模块连接,用于获取无人巡检平台的实时姿态信息,并将无人巡检平台的实时姿态信息传输给巡检模块;其中,巡检模块基于无人巡检平台的实时姿态信息调整无人巡检平台的位置。
31、本发明提供的一种海上风电场的无人巡检平台,通过惯导模块实现了对无人巡检平台位置的实时调整,提高了海上风电场巡检的准确性与灵活性。
32、在一种可选的实施方式中,巡检模块,还用于当未获取到风机位置信息时,则获取风电场区域信息,基于风电场区域信息对海上风电场目标区域进行等间距划分,生成多条平行直线,并基于多条平行直线依次首尾航行,生成风机位置信息。
33、本发明提供的一种海上风电场的无人巡检平台,利用巡检模块实现了风机位置信息的自动生成,使得巡检路线覆盖全面,有效降低了人为风险,提高了巡检效率与准确性。
34、第二方面,本发明提供了一种海上风电场的无人巡检方法,应用于上述一种海上风电场的无人巡检平台,方法包括:
35、通信模块获取远程指挥端传输的海上风电场中的风机位置信息;
36、巡检模块接收风机位置信息,根据风机位置信息确定巡检路线,并控制无人巡检平台按照巡检路线进行航行;
37、激光测距模块测量无人巡检平台与目标风电塔筒的距离,当无人巡检平台与目标风电塔筒的距离等于预设距离时,向巡检模块发送告警信号;
38、巡检模块接收告警信号,基于告警信号停止前进,并以目标风电塔筒为中心进行圆周运动,直至绕行一周后,基于巡检路线进行航行;
39、检测模块对巡检路线中的目标风电塔筒进行检测,生成风机巡检信息,并将风机巡检信息通过通信模块发送给远程指挥端进行分析存储。
- 还没有人留言评论。精彩留言会获得点赞!