基于多传感信息融合的轨道机器人避障控制方法及系统
本公开涉及轨道机器人控制,尤其涉及一种基于多传感信息融合的轨道机器人避障控制方法及系统。
背景技术:
1、自主避障是行走式机器人必备的功能之一,行走式机器人需要能够自主避障,才能在复杂的环境中安全行动。为了避免机器人与环境中的障碍物相撞,确保其足够安全、高效地工作,机器人需要通过传感器感知周围环境中的静态或动态障碍物,并根据一定的算法实时更新路径,绕过障碍物,最终达到目标点或者完成作业任务。
2、避障控制技术的发展经历了几个阶段,包括:基于规则的反应式避障,基于模型的预测式避障,基于学习的智能式避障。反应式避障是指机器人根据当前的传感器数据,直接生成控制命令,调整运动方向和速度,以避免与障碍物碰撞;这种方法简单快速,但缺乏全局规划和预测能力,容易陷入局部最优或死锁状态。预测式避障是指机器人根据传感器数据和内部模型,对未来的运动轨迹和障碍物状态进行预测和评估,选择最优或次优的避障策略;这种方法能够考虑更多的信息和约束,但需要较高的计算能力和准确的模型。智能式避障是指机器人利用机器学习等方法,从大量的数据中学习避障策略或者优化避障性能;这种方法能够适应不同的场景和任务,但需要大量的训练数据和合适的学习算法。
3、然而,目前多传感信息融合的避障控制技术的研究主要针对轮式或履带式机器人展开此类控制方法受虚拟阻抗因子的影响系统鲁棒性较差,而轨道机器人仍多采用单一传感方式的避障控制技术,导致对于轨道机器人的避障控制性能差、精准度差,无法根据不同的实际工况自主进行更新控制。
技术实现思路
1、有鉴于此,本公开实施例提供了一种基于多传感信息融合的轨道机器人避障控制方法及系统,能够有效解决现有技术中存在的轨道机器人避障控制性能差、精准度差,无法根据不同的实际工况自主进行更新控制,智能化程度低的问题。
2、第一方面,本公开实施例提供了一种基于多传感信息融合的轨道机器人避障控制方法,该方法包括:
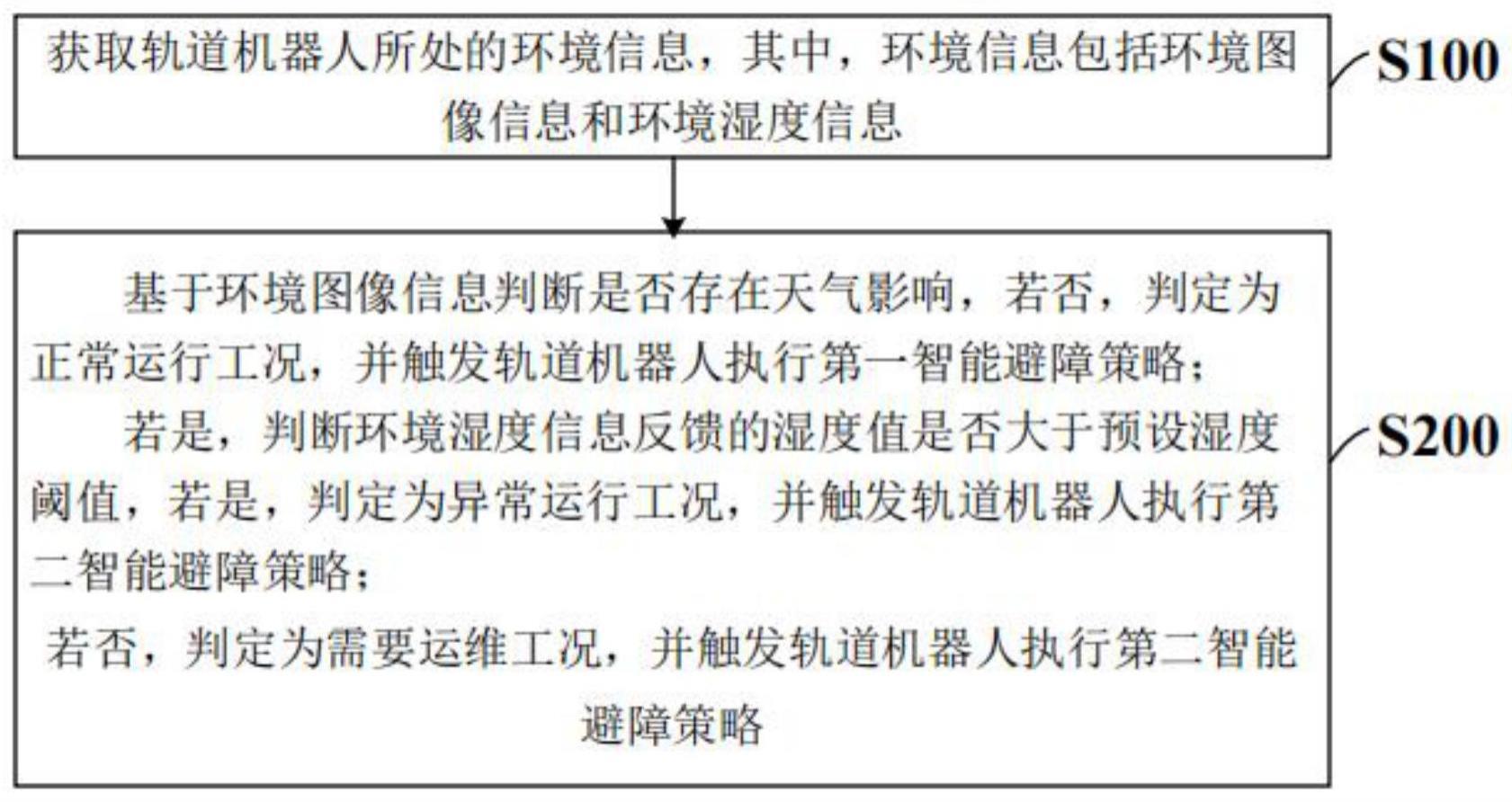
3、获取轨道机器人所处的环境信息;所述环境信息包括环境图像信息和环境湿度信息;
4、基于所述环境图像信息判断是否存在天气影响,若否,判定为正常运行工况,并触发所述轨道机器人执行第一智能避障策略;
5、若是,判断所述环境湿度信息反馈的湿度值是否大于预设湿度阈值,若是,判定为异常运行工况,并触发所述轨道机器人执行第二智能避障策略;
6、若否,判定为需要运维工况,并触发所述轨道机器人执行第三智能避障策略。
7、可选的,所述基于所述环境图像信息判断是否存在天气影响,若否,判定为正常运行工况,包括:
8、当所述环境图像信息中不包含预设天气信息时,则判定为正常运行工况;
9、所述预设天气信息包括大雨、大雪、大雾中的任一种。
10、可选的,所述并触发所述轨道机器人执行第一智能避障策略,包括:
11、以预设的第一扫描策略采集所述轨道机器人设定检测范围内的物体信息,判定在设定检测范围内是否存在物体,若否,控制所述轨道机器人以预设初始速度行进;
12、若是,以预设的第一扫描策略采集该物体到所述轨道机器人的实际距离,判断所述实际距离是否满第一预设条件,若是,控制所述轨道机器人原位停止;
13、若否,判断所述实际距离是否满足第二预设条件,若否,控制所述轨道机器人以预设初始速度行进;
14、若是,采集该物体的图像信息,基于所述图像信息判断该物体是否为人类,若否,按照指数速度函数更新轨道机器人的巡航速度;若是,按照线性速度函数更新轨道机器人的巡航速度;
15、所述第一扫描策略为每0.1秒采集一次数据。
16、可选的,所述第一预设条件为所述实际距离不大于安全距离最小阈值;
17、所述第二预设条件为所述实际距离大于安全距离最小阈值且所述实际距离不大于1.5倍的安全距离最小阈值。
18、可选的,所述指数速度函数为:
19、
20、其中,为更新后的轨道机器人的行进速度,vref为预设初始速度,rsaf为安全距离最小阈值,r为检测到的物体距离轨道机器人的距离,r为速度衰减补偿距离,k为速度衰减系数;
21、所述线性速度函数为:
22、其中,rrat为所述设定检测范围。
23、可选的,所述并触发所述轨道机器人执行第二智能避障策略,包括:
24、以预设的第二扫描策略采集所述轨道机器人设定检测范围内的物体信息,判定在设定检测范围内是否存在障碍物,若否,控制所述轨道机器人以预设初始速度行进;
25、若是,以预设的第二扫描策略采集该障碍物到所述轨道机器人的实际距离,判断所述实际距离是否满第一预设条件,若是,控制所述轨道机器人原位停止;
26、若否,判断所述实际距离是否满足第二预设条件,若否,控制所述轨道机器人以预设初始速度行进;
27、若是,采集该障碍物的图像信息,基于所述图像信息判断该障碍物是否为人类,若否,按照指数速度函数更新轨道机器人的巡航速度;若是,按照线性速度函数更新轨道机器人的巡航速度。
28、可选的,所述第二扫描策略包括:按照预设采集频率采集n次,获得n个实际数据;
29、剔除n个实际数据中的跃变数据,得到n个正常数据;
30、计算n个正常数据的平均值,获得该平均值对应的实际信息作为后续预设的扫描频率;
31、0<n<n。
32、可选的,所述预设采集频率为每10毫秒采集1次数据;
33、n为10;
34、所述跃变数据为最大数据和最小数据。
35、可选的,所述第三智能避障策略为控制所述轨道机器人原位停止。
36、第二方面,本公开实施例还提供了一种基于多传感信息融合的轨道机器人避障控制系统,包括:
37、获取模块,获取轨道机器人所处的环境信息;所述环境信息包括环境图像信息和环境湿度信息;
38、第一判断模块,基于所述环境图像信息判断是否存在天气影响,若否,判定为正常运行工况,并触发所述轨道机器人执行第一智能避障策略;
39、第二判断模块,若所述环境图像信息判断存在天气影响,判断所述环境湿度信息反馈的湿度值是否大于预设湿度阈值,若是,判定为异常运行工况,并触发所述轨道机器人执行第二智能避障策略;
40、第三判断模块,若所述环境湿度信息反馈的湿度值不大于预设湿度阈值,判定为需要运维工况,并触发所述轨道机器人执行第三智能避障策略。
41、第三方面,本公开实施例还提供了一种电子设备,采用如下技术方案:
42、所述电子设备包括:
43、至少一个处理器;以及,
44、与所述至少一个处理器通信连接的存储器;其中,
45、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行以上任一所述的基于多传感信息融合的轨道机器人避障控制方法。
46、第四方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储计算机指令,该计算机指令用于使计算机执行以上任一所述的基于多传感信息融合的轨道机器人避障控制方法。
47、本技术公开的基于多传感信息融合的轨道机器人避障控制方法,可以全面获得轨道机器人所处的环境信息,获得轨道机器人所处的运行工况,并能够根据所划分的工况,实时、自动地调整轨道机器人的巡航速度,实现轨道机器人的智能避障控制;该申请有效的解决了轨道机器人在不同工况条件下的避障控制问题,保证了轨道机器人自身安全以及运行区域内作业人员的人身安全。
48、上述说明仅是本公开技术方案的概述,为了能更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为让本公开的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!