基于视觉分析调整飞行姿态的单片机控制系统的制作方法
本发明涉及飞行姿态控制,具体地说,涉及基于视觉分析调整飞行姿态的单片机控制系统。
背景技术:
1、飞行器移动为了减少飞行路径中的障碍物,一般处于高空飞行,但飞行器在飞行过程中,由于高空的风阻环境影响飞行器正常飞行,需要持续对飞行器的飞行姿态进行调整,目前是通过飞行器的规划航线和实际飞行航线进行比对,若出现差异,再对飞行姿态进行调整,但单片机的计算和存储资源通常有限,限制了航线比对的实时传输,而且只能判断出飞行器偏离,不方便获取飞行器具体飞行姿态的倾斜角度,导致不能依据数据进行校正造成控制偏差,为了减少这种情况,鉴于此,提出基于视觉分析调整飞行姿态的单片机控制系统。
技术实现思路
1、本发明的目的在于提供基于视觉分析调整飞行姿态的单片机控制系统,以解决上述背景技术中提出的问题。
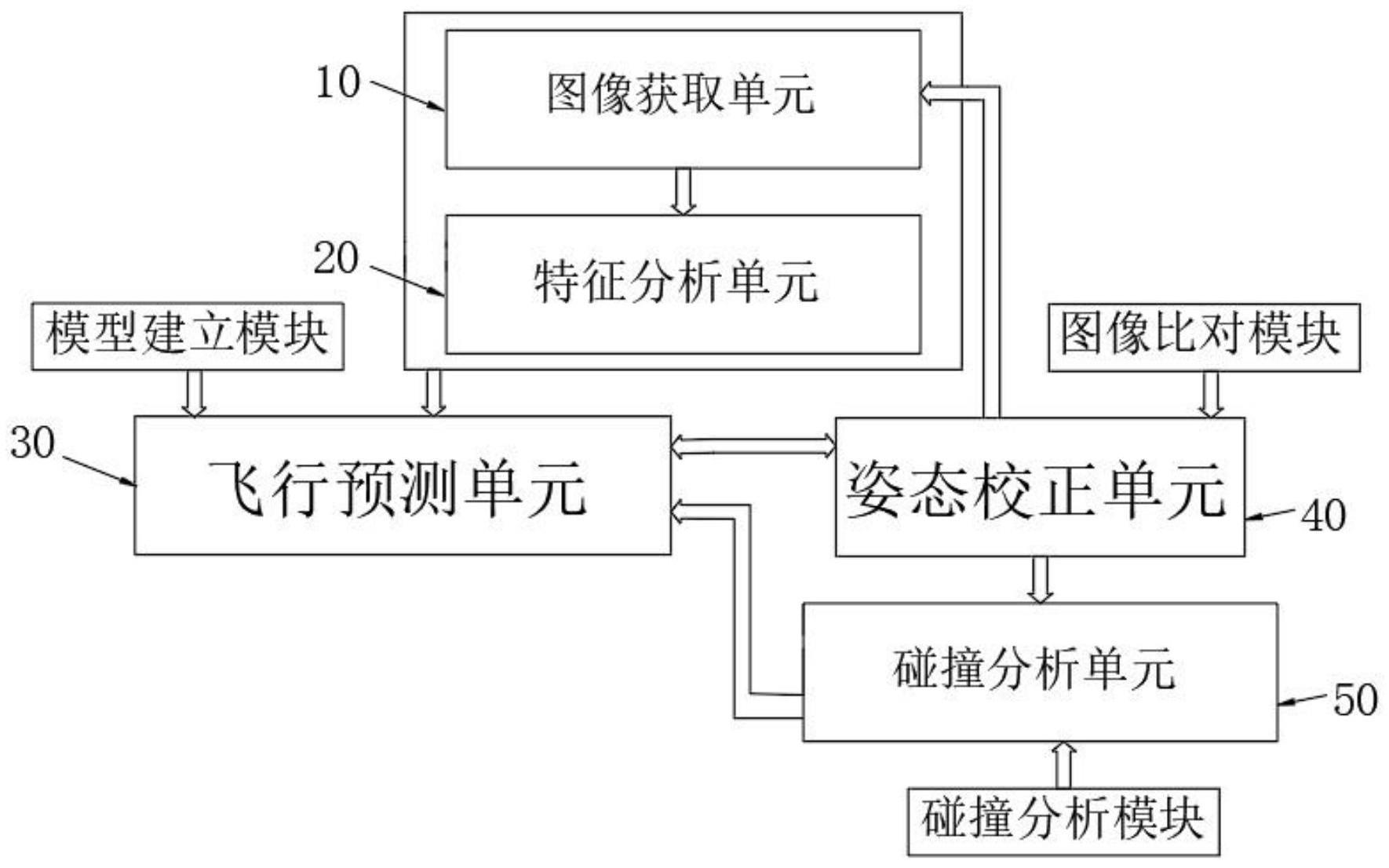
2、为实现上述目的,提供了基于视觉分析调整飞行姿态的单片机控制系统,包括图像获取单元、特征分析单元、飞行预测单元、姿态校正单元以及碰撞分析单元;
3、所述图像获取单元用于将单片机和飞行器之间建立传输通道,使单片机记录飞行器途中获取的图像信息;
4、所述特征分析单元用于在图像获取单元获取的实时图像信息中进行特征提取,获取图像信息中静态特征数据和鸟类特征数据;
5、所述飞行预测单元用于根据飞行器类型设置定时拍摄,获取飞行器的飞行航线和飞行速度,根据飞行航线和飞行速度建立图像预测模型并输入实时获取的图像信息,图像预测模型根据定时拍摄的时间输出预测图像信息;
6、所述姿态校正单元用于将二次拍摄图像信息和飞行预测单元输出的预测图像信息进行比对,若二次拍摄图像和预测图像信息中的静态特征数据不相同,将二次拍摄图像结合预测图像信息进行飞行姿态校正分析,获取应该修改的飞行姿态数据并发送至单片机控制飞行器调整飞行姿态,校正飞行航线;
7、所述碰撞分析单元用于将二次拍摄图像信息和输出预测图像信息的鸟类特征数据进行结合鸟类飞行分析,获取鸟类飞行预测轨迹,然后将预测轨迹和姿态校正单元校正之后的飞行航线进行碰撞分析,若分析结果显示产生碰撞,为避开鸟类飞行进行二次校正飞行航线。
8、作为本技术方案的进一步改进,所述图像获取单元通过将单片机和飞行器签订网络控制信息协议,从而使单片机和飞行器之间建立传输通道,使单片机提取飞行器的飞行数据。
9、作为本技术方案的进一步改进,所述图像获取单元通过在飞行器表面安装摄像头,摄像头在飞行棋飞行途中拍摄图像信息,单片机通过传输通道提取摄像头拍摄的图像信息并进行记录保存。
10、作为本技术方案的进一步改进,所述特征分析单元用于在图像获取单元获取的图像信息中进行特征提取,将图像信息中的树、山壁和建筑物进行提取作为静态特征数据,优先级建筑物,然后提取飞行器行驶方向的鸟类特征数据。
11、作为本技术方案的进一步改进,所述飞行预测单元设置定时拍摄的步骤如下:
12、确定飞行器类型:首先确定所使用的飞行器类型;
13、了解飞行器的特性:了解所选飞行器的最大速度、飞行模式、电池容量以及传感器的采样率特性;
14、确定摄像设备与参数:根据飞行器所装备的摄像设备和摄像头的分辨率、帧率、曝光时间;
15、综合考虑拍摄频率与需求:根据飞行器类型、特性以及拍摄任务的需求,综合拍摄频率合理性;
16、设置定时拍摄时间:根据特性、参数以及需求设定合适的定时拍摄时间。
17、作为本技术方案的进一步改进,所述飞行预测单元通过利用卫星地图软件获取地图数据。
18、作为本技术方案的进一步改进,所述飞行预测单元包括模型建立模块;
19、所述模型建立模块用于通过建立的传输通道获取飞行器的飞行航线和飞行速度,然后根据飞行航线和飞行速度结合地图数据建立图像预测模型,之后输入实时获取的图像信息,图像预测模型根据飞行航线和飞行速度结合定时拍摄时间预测飞行器二次拍摄时的位置,然后将二次拍摄的位置结合地图数据进行分析,输出二次拍摄位置的图像信息作为预测图像信息。
20、作为本技术方案的进一步改进,所述姿态校正单元包括图像比对模块;
21、所述图像比对模块用于将二次拍摄图像信息和模型建立模块输出的预测图像信息进行比对,若二次拍摄图像和预测图像信息中的静态特征数据不相同,将二次拍摄图像结合预测图像信息进行飞行姿态校正分析,获取应该修改的飞行姿态数据并发送至单片机控制飞行器调整飞行姿态,校正飞行航线,反之,若二次拍摄图像和预测图像信息中的静态特征数据相同,即无需对飞行器调整飞行姿态。
22、作为本技术方案的进一步改进,所述碰撞分析单元包括碰撞分析模块;
23、所述碰撞分析模块用于将二次拍摄图像信息和输出预测图像信息的鸟类特征数据进行结合鸟类飞行分析,获取鸟类飞行预测轨迹,然后将预测轨迹和图像比对模块校正之后的飞行航线进行碰撞分析,若分析结果显示产生碰撞,为避开鸟类飞行调整飞行器的飞行姿态完成二次校正飞行航线。
24、与现有技术相比,本发明的有益效果:
25、该基于视觉分析调整飞行姿态的单片机控制系统中,通过使用视觉分析技术,系统可以准确识别飞行器的当前姿态,并根据预先定义的策略进行调整,这可以确保飞行器在执行任务期间保持稳定的飞行姿态,提高飞行器的精确性和控制能力,传感器从摄像头或其他传感器获得即时的图像数据,经过图像处理和分析后,可以快速计算出需要调整的飞行姿态,通过实时的反馈控制,系统可以在短时间内对飞行器的姿态进行调整,以适应飞行条件的变化。
技术特征:
1.基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:包括图像获取单元(10)、特征分析单元(20)、飞行预测单元(30)、姿态校正单元(40)以及碰撞分析单元(50);
2.根据权利要求1所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述图像获取单元(10)通过将单片机和飞行器签订网络控制信息协议,从而使单片机和飞行器之间建立传输通道,使单片机提取飞行器的飞行数据。
3.根据权利要求1所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述图像获取单元(10)通过在飞行器表面安装摄像头,摄像头在飞行棋飞行途中拍摄图像信息,单片机通过传输通道提取摄像头拍摄的图像信息并进行记录保存。
4.根据权利要求1所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述特征分析单元(20)用于在图像获取单元(10)获取的图像信息中进行特征提取,将图像信息中的树、山壁和建筑物进行提取作为静态特征数据,优先级建筑物,然后提取飞行器行驶方向的鸟类特征数据。
5.根据权利要求1所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述飞行预测单元(30)设置定时拍摄的步骤如下:
6.根据权利要求1所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述飞行预测单元(30)通过利用卫星地图软件获取地图数据。
7.根据权利要求1所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述飞行预测单元(30)包括模型建立模块;
8.根据权利要求7所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述姿态校正单元(40)包括图像比对模块;
9.根据权利要求8所述的基于视觉分析调整飞行姿态的单片机控制系统,其特征在于:所述碰撞分析单元(50)包括碰撞分析模块;
技术总结
本发明涉及飞行姿态控制技术领域。本发明涉及基于视觉分析调整飞行姿态的单片机控制系统。其包括图像获取单元、特征分析单元、飞行预测单元、姿态校正单元以及碰撞分析单元;图像获取单元用于将单片机和飞行器之间建立传输通道,使单片机记录飞行器途中获取的图像信息;飞行预测单元用于根据飞行器类型设置定时拍摄,获取飞行器的飞行航线和飞行速度,根据飞行航线和飞行速度建立图像预测模型并输入实时获取的图像信息,图像预测模型根据定时拍摄的时间输出预测图像信息;通过使用视觉分析技术,系统可以准确识别飞行器的当前姿态,并根据预先定义的策略进行调整,这可以确保飞行器在执行任务期间保持稳定的飞行姿态。
技术研发人员:陈云,聂双,李根,陆杨
受保护的技术使用者:江苏芯安集成电路设计有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!