基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制方法及其控制系统
本发明属于航天领域,具体涉及一种基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制方法及其控制系统。
背景技术:
1、一组小卫星编队可以完成单颗大卫星难以完成的复杂任务,在过去的二十年里,基于图论的航天器编队的姿态协同控制问题因其广泛的潜在应用价值引起了研究人员的广泛关注。需要进行姿态协同控制的航天器编队可以分为有领航星和无领航星两种情形。对于有领航星的星群姿态协同控制问题,有两种可行的控制方案。一种是基于各星间的姿态和角速度误差的反馈值构造控制器,另一种是各跟随星通过分布式状态观测器对领航星的姿态及角速度信息进行实时估计,然后对估计值进行姿态跟踪。
2、传统非线性控制方法理论上所需的收敛时间往往是无穷大的,而工程应用中对姿态误差的收敛时间往往是有要求的,因而这些方法的实用性受到了一定限制。为增强控制器的实用性,有限时间控制是一种有效的控制方法,它可以保证系统在不大于某确定值的时间内完成收敛,但是此收敛时间上界与初始条件直接相关。相比之下,固定时间控制的收敛时间上界仅由控制器本身的参数决定,与初始条件无关,可以使设计者在设计控制器的时候摆脱初始条件对于如何设置控制器参数的困扰。但是,传统固定时间控制的一个主要缺点是收敛时间上界往往与控制器的多个参数存在比较复杂的等式关系。给定要求的收敛时间以后,如何确定各个控制参数的值是一个比较困难的问题。而作为固定时间控制的一种特殊形式,预设时间控制的收敛时间上界显式存在于控制器参数当中,设计者可以根据实际需要很方便地对其进行设置,因而成为当下的一个热门研究方向。
3、目前,常用的预设时间控制技术包括终端滑模、性能函数和时域转换。第一种方法基于现有预设时间数学理论,构造终端滑模及控制器,实现系统的预设时间控制。在系统所受扰动上界已知的情况下,第一种方法可以保证系统误差在预设时间内收敛至指定的精度以内,即预设精度;但如果扰动上界未知,则只能保证系统误差在预设时间内收敛至零附近,具体精度未知。相比之下,借助性能函数,可以在扰动上界未知情况下实现系统的预设时间预设精度控制。第三种方法则适合用于构造预设时间状态观测器或者扰动观测器。
技术实现思路
1、本发明提供一种基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制方法,用以解决刚体航天器编队的快速高精度总体协调控制问题。
2、本发明提供一种基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制系统,用以实现基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制方法。
3、本发明通过以下技术方案实现:
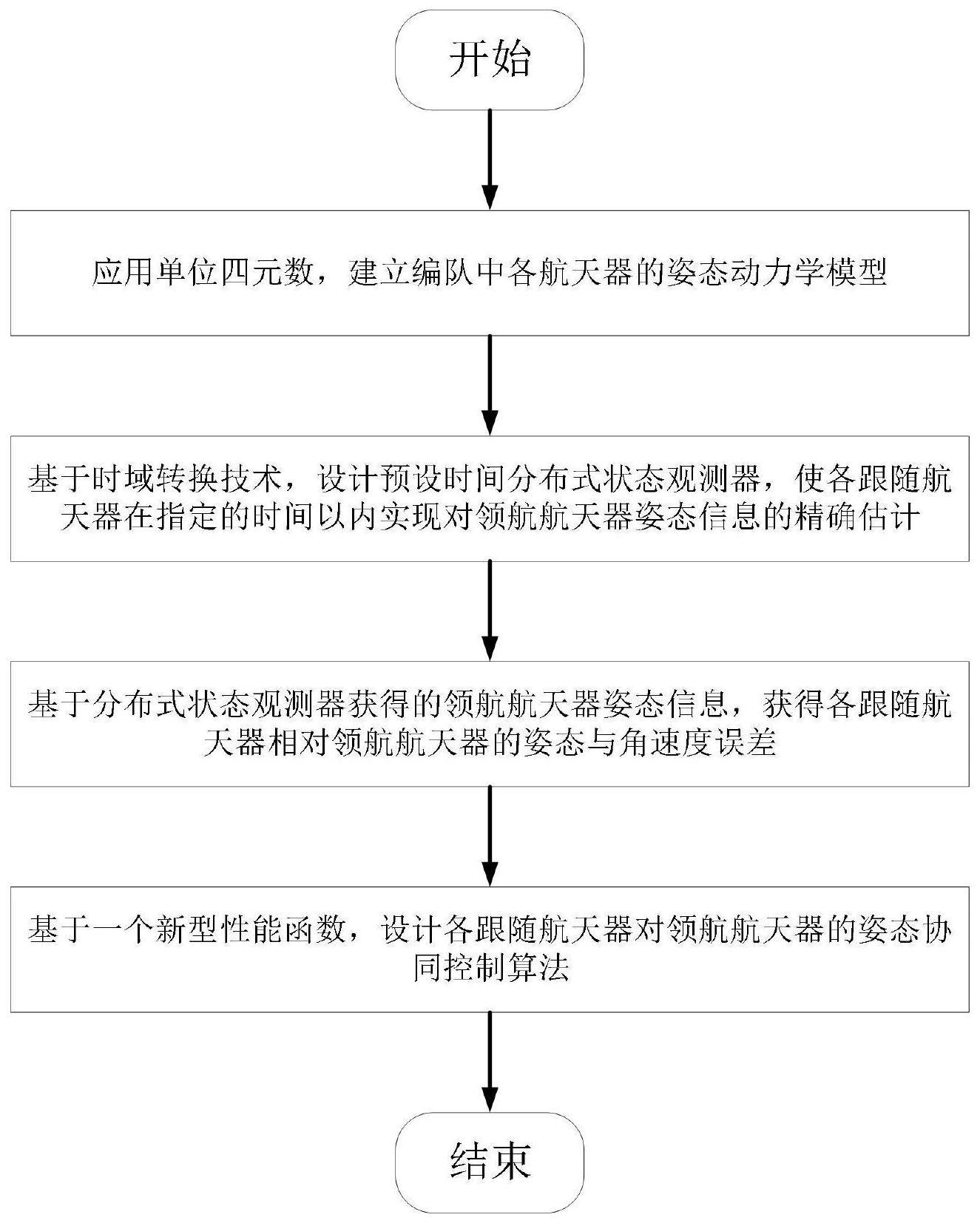
4、一种基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制方法,所述协同控制方法包括,
5、首先基于时间转换函数,构造各跟随航天器对领航航天器姿态及角速度信息的分布式预设时间状态观测器;
6、然后基于此观测器估计获得的领航航天器的姿态信息,考虑扰动力矩上界未知,采用自适应技术对其进行补偿,设计了基于一个新型性能函数的预设时间预设精度的姿态协同控制算法;
7、实现有领航星的航天器编队的预设时间预设精度的姿态协同控制。
8、假设各航天器间的信息传递是有向的,全体n个跟随航天器组成的系统由一个有向图g={v,ε,a}来表示,其中v={v1,...,vn}表示n个跟随航天器所对应的节点;ε表示图g中所有的有向边集,其中有向边(vi,vj)∈ε表示跟随航天器i对跟随航天器j存在信息传递。a=[aij]∈rn×n表示g的加权邻接矩阵,如果(vj,vi)∈ε,则aij>0,否则aij=0;aii=0。将领航航天器的序号记为0,以节点v0表示,其与n个跟随航天器对应的节点共同组成的有向拓扑图记为领航航天器的邻接矩阵为b=diag{b1,...,bn},若领航航天器对跟随航天器i存在信息传递,则bi>0,否则bi=0。本发明假设拓扑图包含一个有向生成树,以领航航天器为根节点。
9、进一步的,所述基于时间转换函数,构造各跟随航天器对领航航天器姿态及角速度信息的分布式预设时间状态观测器具体为,
10、构造如下两个时间转换函数:
11、t=θ0(ρ0)=tp0tanh(ρ0/tp0) (1)
12、t=θ1(ρ1)=tp1tanh(ρ1/tp1) (2)
13、其中tp1>tp0,tanh(.)表示双曲正切函数;式(1)和式(2)分别将时间域t∈[0,tp0)和t∈[0,tp1)转换为ρ0∈[0,∞)和ρ1∈[0,∞)。
14、进一步的,令x1i、x2i分别为跟随航天器i对领航航天器姿态四元数q0及其时间导数的估计值,基于式(1)和式(2)时间转换函数,提出分布式预设时间状态观测器形式如下:
15、
16、其中,
17、
18、
19、sign(.)是符号函数,k1、k0均为大于零的常数,γ是领航航天器姿态四元数的二阶时间导数的模值的上界,满足
20、其中是表示领航航天器姿态的单位四元数。
21、进一步的,根据上述状态观测器的估计结果,跟随航天器i可以获得其做姿态机动的期望姿态及时间导数:
22、
23、相应的期望角速度为
24、
25、由此,跟随航天器i的姿态和角速度协同误差分别为
26、
27、ωei=ωi-c(qei0,qei)ωdi (7)
28、其中是表示跟随航天器姿态i的单位四元数,ωi是跟随航天器i相对惯性坐标系的角速度,对任意三维向量a=[a1 a2 a3]t,a×=[0 -a3 a2;a3 0 -a1;-a2 a10],
29、
30、相应的,误差姿态运动学与姿态动力学方程分别为,
31、
32、
33、其中ji是跟随航天器i的转动惯量矩阵。
34、进一步的,所述基于此观测器估计获得各跟随航天器对领航航天器的姿态信息,考虑扰动力矩上界未知,采用自适应技术对其进行补偿,设计一个基于新型性能函数的预设时间预设精度的姿态协同控制算法具体为,
35、构造如下新型性能函数:
36、
37、其中ε>0即为对姿态跟踪误差四元数矢部的三个分量预设的收敛精度。
38、进一步的,取tp2=100,ε=0.01,
39、令
40、
41、
42、
43、
44、构造一个中间变量
45、
46、针对未知的外部扰动的上界di,设计如下自适应规律进行补偿:
47、
48、其中g>0。
49、进一步的,设计如下姿态控制律:
50、
51、其中a>0,k∈r3×3为对称正定矩阵;控制律式(17)需要用到ωdi的时间导数,通过追踪微分器或者高阶滑模微分器获得的值;显然,控制律式(17)是连续的;
52、在通过观测器式(3)准确获得领航航天器的姿态信息以后,在控制律式(17)作用下,经过预设的tp2时间以后姿态协同误差的三个分量将保持在指定的精度|qeik|≤ε(k=1,2,3)以内。
53、一种基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制系统,所述协同控制系统使用上述基于分布式状态观测器的航天器编队预设时间预设精度的姿态协同控制方法,所述协同控制系统包括,
54、分布式预设时间状态观测器,基于时间转换函数与各跟随航天器对领航航天器姿态及角速度信息进行构造,可以保证各跟随航天器在指定的时间以内实现对领航航天器姿态及角速度的精确估计;
55、预设时间预设精度的姿态协同控制模块,基于分布式预设时间状态观测器估计获的领航航天器的姿态信息,考虑扰动力矩上界未知,采用自适应技术对其进行补偿,基于新型性能函数设计预设时间预设精度的姿态协同控制算法;实现有领航星的航天器编队的预设时间预设精度的姿态协同控制。
56、实现有领航星的航天器编队的预设时间预设精度的姿态协同控制。
57、一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
58、存储器,用于存放计算机程序;
59、处理器,用于执行存储器上所存放的程序时,实现上述的方法步骤。
60、一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法步骤。
61、本发明的有益效果是:
62、本发明可确保在航天器编队接收到姿态协同指令后,各跟随航天器与领航航天器的姿态协同误差将在预设时间内收敛到预设精度。
63、本发明的预设时间与预设精度可由航天任务规定实现。
- 还没有人留言评论。精彩留言会获得点赞!