面向数据采集的多无人机路径规划方法
本发明属于路径规划领域,特别是涉及一种面向数据采集的多无人机路径规划方法。
背景技术:
1、中国联通网络技术研究院发布的《空天地一体化通信系统白皮书》中提出要构建天地一体的通信网络和全域覆盖的感知网络,实现对突发事件和自然灾害进行系统化、立体化、智能化动态监测。无线传感器网络(wireless sensor networks,wsns)通过大量经济且易部署的传感器节点(sensor node,sn)对环境进行数据采集,并借助通信单元完成数据回传。wsns的多元化场景应用是物联网技术中的重要技术领域,目前已在数据采集、目标跟踪、应急救援等领域广泛应用。传统wsns常采用多跳的方式回传数据,多跳传输在规模较大的网络中存在高延迟、网络拥塞等问题,无法满足复杂动态场景中对信息时效性及最小化信息年龄(age of information,aoi)的要求。在复杂动态场景中,无人机(unmannedaerial vehicle,uav)因其高移动性、低成本、可集群控制等特点,可以在低空域构建空对地通信链路,为地面设备提供可靠通信和及时空中数据服务,充当wsns的移动空中基站和数据传输中继。因此,利用多uav辅助wsns进行数据采集是解决上述问题的有效办法,可进一步提升数据的时效性。
2、由于在网络中飞行的uav具有较强的动态性,其消息的快速回传显得至关重要,使用uav来辅助wsns带来了新的挑战。传统基于通信服务质量、延迟等指标的多uav路径规划算法不在适用于优化aoi的场景。近年来,学者对uav辅助wsns数据采集的路径规划问题开展了一系列的研究。文献[9:yang x,fu s,wu b et al.a survey of key issues in uavdata collection in the internet of things[c]//ieee international conferenceon dependable,autonomic and secure computing.calgary:ieee,2020:410-413.]主要围绕sn和uav的部署、uav路径规划和自主避障角度介绍了uav辅助数据采集的关键技术和挑战。文献[10:chen j,ye f,jiang t,et al.data collection and energy chargingfor uav-aided wireless sensor network based on a two-layer task assignmentstrategy[c]//ieee usnc-cnc-ursi northamerican radio science meeting(jointwithap-ssymposium).montreal:ieee,2020:55-56.]面向大型监控区域,提出一种双层任务分配机制,最小化uav辅助wsns场景下飞行路径距离。在该文献中,首先将监控区域划分为不同的子区域,然后根据任务需求派飞各uav前往各子区域执行任务。文献[11:mao c,lui j,xie l.multi-uav aided data collection for age minimization in wirelesssensor networks[c]//international conference on wireless communications andsignal processing(wcsp).nanjing:ieee,2020:80-85.]和文献[12:liu j,tong p,wangx,et al.uav-aided data collection for information freshness in wirelesssensor networks[j].ieee transactions on wireless communications,2021,21(4):2368-2382.]研究了多uav辅助wsns完成信息采集中最小化aoi的问题。文献[11:mao c,luij,xie l.multi-uav aided data collection for age minimization in wirelesssensor networks[c]//international conference on wireless communications andsignal processing(wcsp).nanjing:ieee,2020:80-85.]中在利用图论建模的基础上,使用k-means算法实现sns的聚类,并利用遗传算法优化uav飞行路径。文献[12:liu j,tongp,wang x,etal.uav-aided data collection for information freshness in wirelesssensor networks[j].ieee transactions on wireless communications,2021,21(4):2368-2382.]则是先对sn进行分簇,uav在固定悬停节点直接采集簇内sn信息,在一定程度上考虑了所采集数据的关联性,但是该文献中每个sn均需要独立发送数据给uav会降低采集效率,且基于k-means算法的分簇受初始值和异常点影响较大,获得的往往是局部最优解,在一定程度增加了wsns采集信息的aoi,降低了信息的时效性。对于上述文献uav悬停的采集策略,在一些较大的数据采集区域中,由于uav的续航能力有限,需要定时进行充电或者更换电池,这也限制了uav辅助数据采集的范围和数据采集效率。为此,通过合理分簇,由簇头成员搜集簇内成员信息,多uav协同采集簇头信息,可进一步降低wsns采集信息的aoi。文献[13:chen m,saad w,yin c,et al.data correlation-aware resource managementin wireless virtual reality(vr):an echo state transfer learning approach[j].ieee transactions on communications,2019,67(6):4267-4280.14:wang l,wang k,pan c,et al.deep q-network based dynamic trajectory design for uav-aidedemergency communications[j].journal ofcommunications and informationnetworks,2020,5(4):343-402.15:zhou c,he h,yang p,et al.deep rl-basedtrajectory planning for aoi minimization in uav-assisted iot[c]//11thinternational conference on wireless communications and signal processing(wcsp).xi'an:ieee,2019:1-6.]中则是使用强化学习的方式对uav路径进行优化,以此来获得更优的系统aoi。该方法虽然可以获得不错的解,但是在求解过程中大量的离线计算会消耗更多的计算资源,需要较长的求解时间,在追求快速求解的动态场景中不适用。
技术实现思路
1、本发明的目的是提供一种面向数据采集的多无人机路径规划方法,以解决上述现有技术存在的问题。
2、为实现上述目的,本发明提供了一种面向数据采集的多无人机路径规划方法,包括:
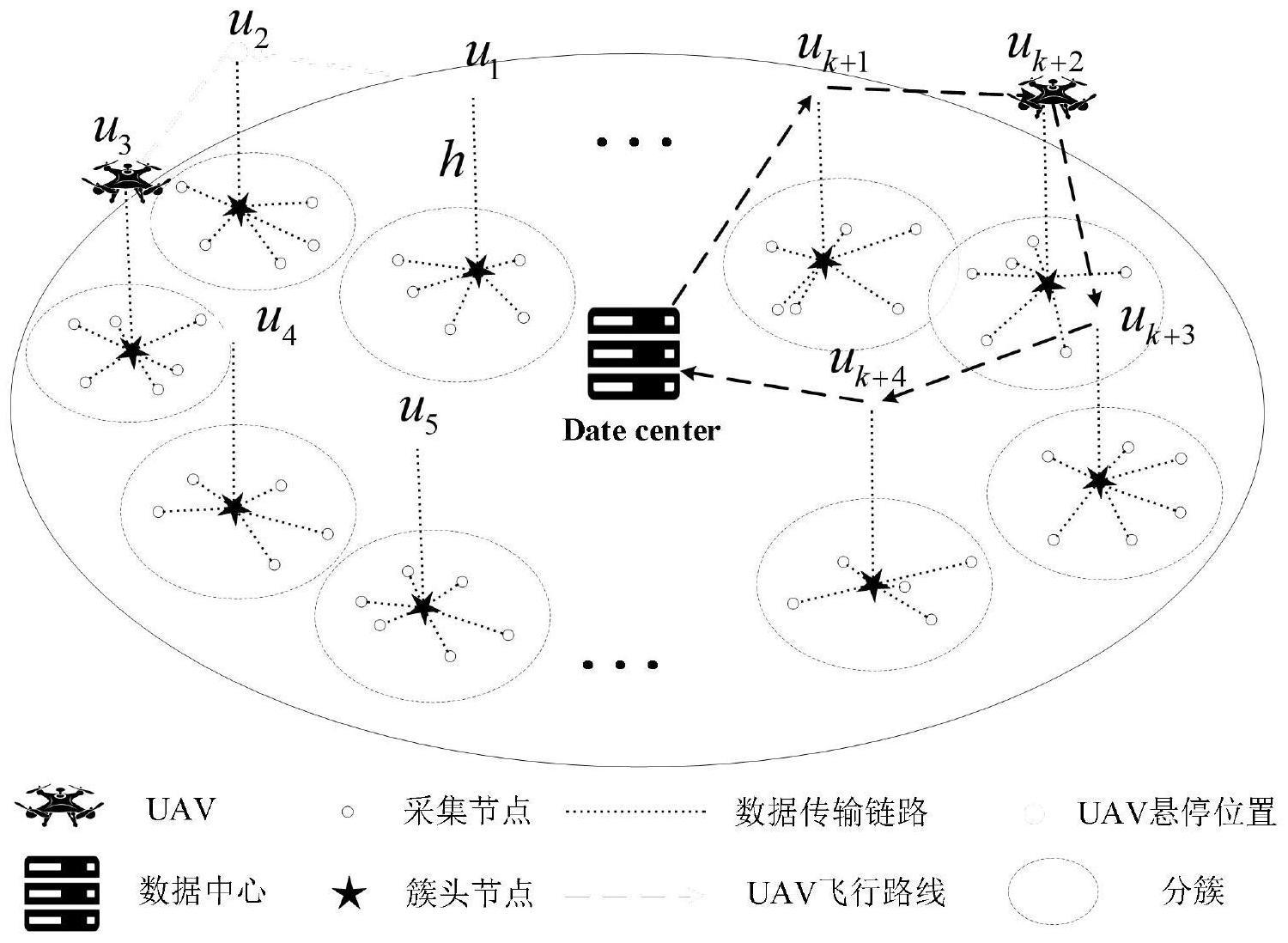
3、将无人机传感器节点分为若干个簇,通过所述若干个簇进行数据采集,获取簇组数据采集的过程和无人机路径;
4、对所述簇组数据采集的过程进行相关性优化,获得分簇问题的解;
5、对无人机路径进行优化,获得无人机路径优化解;
6、基于所述分簇问题的解和所述无人机路径优化解对多无人机的路径进行规划。
7、优选地,所述获取簇组数据采集的过程的过程包括:
8、将所述无人机传感器节点分为若干个簇,对所述若干个簇中的节点进行选取,获得若干个簇的簇头;
9、通过所述若干个簇的簇头采集若干个簇内无人机收集的信息,获得所述簇组数据采集的过程。
10、优选地,所述获得分簇问题的解的过程包括:
11、将传感器节点在满足最大簇成员数量约束条件下随机划分为若干个分簇,得到初始化联盟集合;
12、将所述初始化联盟集合中的无人机和传感器节点进行交换,获得交换操作联盟;
13、增加空元素,将所述空元素添加至所述初始化联盟集合中的无人机和传感器节点进行交换的过程中继续进行交换,获得所述分簇问题的解。
14、优选地,对所述簇组数据采集的过程进行相关性优化表示为:
15、
16、其中,φi→j表示为协方差,表示为传感器节点i的跟踪数据,表示为节点j的跟踪数据,di,j为节点i到节点j之间的距离,δ和κ决定两个传感器节点之间的距离值对数据相关性的影响程度。
17、优选地,所述获得无人机路径优化解的过程包括:
18、获取最小化信息年龄,基于所述最小化信息年龄构建改进ant-q的cgg算法;
19、基于所述改进ant-q的cgg算法对多无人机的路径进行优化,获得所述无人机路径优化解。
20、优选地,所述最小化信息年龄的表达式为:
21、δi(t)=ti,w(t)+n(ti,p(t)+ti,f(t));
22、其中,δi(t)表示为节点i的最小化信息年龄,ti,w(t)表示为节点i数据从产生到被无人机采集前的等待时间,ti,p(t)表示为为无人机采集节点i所在ch数据包的上传时间,ti,f(t)表示为节点i所在ch的无人机飞行总时间。
23、优选地,所述改进ant-q的cgg算法中的效用函数的表达式为:
24、uk,t(xk,t(u,i))=tw,av+(i-1)·tf(xk,t(u,i));
25、其中,uk,t(xk,t(u,i))表示为t时刻各uav采集所有ch的效用总和,tw,av表示为节点i从产生到被采集前的等待时间,固定值,tf(xk,t(u,i))表示为节点i所在ch的无人机飞行总时间。
26、优选地,基于所述分簇问题的解和所述无人机路径优化解对多无人机的路径进行规划的过程包括:
27、将多无人机路径规划的优化目标转化为传感器节点分簇优化目标和最优最小化信息年龄的无人机路径规划优化目标;
28、基于所述分簇问题的解将所述传感器节点分簇优化目标进行优化,获得分簇相关度优化解;
29、基于所述无人机路径优化解对所述最优最小化信息年龄的无人机路径规划优化目标进行优化,获得信息获取的解。
30、本发明的技术效果为:
31、在多无人机辅助无线传感器网络的数据采集场景下,构建关于多无人机路径规划的层次化联盟图博弈模型,实现最小化采集信息的最小化信息年龄。
32、将多无人机辅助无线传感器网络协同数据采集问题分解为节点分簇和无人机s路径规划两个过程,分别采用基于交换的cgg算法和基于改进ant-q算法的cgg进行求解。
33、仿真结果表明,该方法在取得近似最优解的同时具有较快的收敛速度。与蚁群算法、模拟退火算法以及遗传算法对比,验证了该方法的有效性。
- 还没有人留言评论。精彩留言会获得点赞!