一种隧道巡检机器人自适应控速方法与流程
本发明涉及计算机视觉,特别涉及一种隧道巡检机器人自适应控速方法。
背景技术:
1、特征点检测和速度自控模型在工业生产中有着重要的技术背景。特征点检测在工业生产中的应用非常广泛,特别是在计算机视觉和机器视觉领域。工业生产中常常需要对产品进行质量检测、零件匹配、位置定位等任务,而特征点检测可以提供关键的视觉特征信息,以实现这些任务。
2、特征点检测在工业生产中的应用非常广泛,特别是在计算机视觉和机器视觉领域。工业生产中常常需要对产品进行质量检测、零件匹配、位置定位等任务,而特征点检测可以提供关键的视觉特征信息,以实现这些任务。随着工业生产的自动化和数字化程度的提高,生产过程中产生的图像和视频数据量急剧增加。特征点检测技术能够高效地处理大规模的图像数据,提取出关键的特征点,为后续的分析和决策提供基础。特征点检测是计算机视觉领域的核心任务之一,随着计算机视觉算法的不断发展和改进,特征点检测算法也在不断演进和改进。随着硬件技术的不断进步,如计算能力的提升、传感器的改进等,特征点检测算法在实时性和精度方面都有了很大的提升。这使得特征点检测在工业生产中的应用更加可行和可靠。
3、速度自控模型在工业生产中的应用主要涉及自适应控制和自动化系统。在工业生产中,需要对生产过程进行实时的控制和调整,以满足不同的工艺要求和产品质量标准。在工业生产中,许多任务需要实时性地进行控制和调整,如自动化装配线的速度调节、机器人的路径规划和调整等。速度自控模型能够根据实际需求,实时地调整系统的运行速度,满足实时性控制的需求。速度自控模型涉及到自适应控制算法的应用,而自适应控制算法的发展和改进为速度自控模型的实现提供了技术支持。例如,模糊控制、pid控制、自适应控制等算法的应用,使得速度自控模型在工业生产中更加灵活和可靠。速度自控模型需要依靠传感器对系统状态进行实时监测,以及执行器对系统进行实时调整。随着传感器和执行器技术的改进和进步,如高精度传感器的应用、电机控制系统的改进等,使得速度自控模型能够更准确地感知和调整系统的速度。根据产品需求和生产线的实际情况,实时调节生产线的运行速度,以提高生产效率和产品质量。而在机器人领域。根据机器人当前的任务和工作环境,实时调整机器人的路径规划和运行速度,以适应不同的工作场景和任务要求。根据自动化系统的实际需求和运行状态,实时调整系统的速度和运行模式,以实现精确的控制和调节。
技术实现思路
1、为实现上述目的,本发明提供了一种隧道巡检机器人自适应控速方法。
2、本发明提供的一种隧道巡检机器人自适应控速方法,包括:
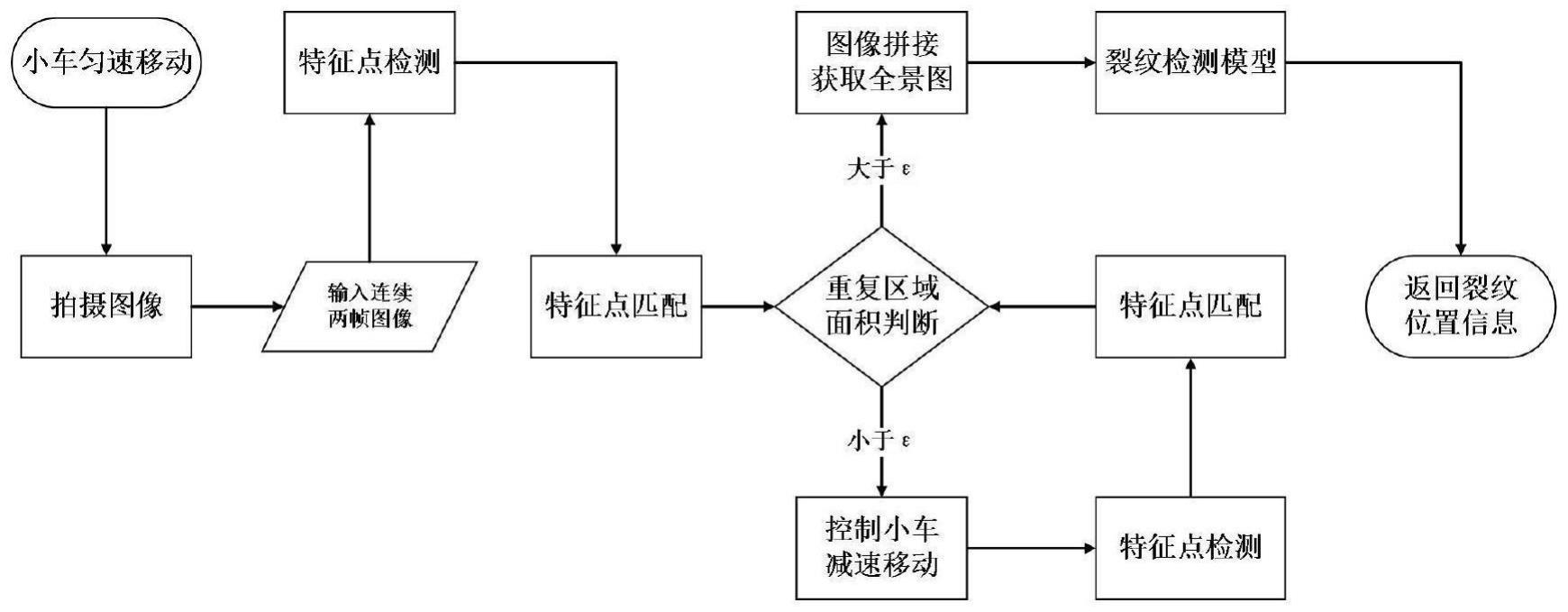
3、获取巡检机器人的初始参量,基于所述巡检机器人采集隧道图像;
4、基于特征点检测模型对连续两帧的隧道图像进行特征点检测得到特征点匹配结果;
5、基于所述特征点匹配结果控制所述巡检机器人的巡检速度,获得自适应控速巡检机器人;
6、基于所述自适应控速巡检机器人获取隧道全景图;
7、基于裂纹检测模型对所述隧道全景图进行裂纹检测得到隧道裂纹检测结果。
8、可选地,所述特征点检测模型采用sift特征点检测方法对连续两帧的隧道图像进行特征点检测,并将检测的特征点标注于隧道图像;
9、其中,特征点的检测过程包括:
10、基于所述sift特征点检测方法对所述隧道图像进行尺度变换得到不同尺度空间下的表示序列;
11、基于不同尺度空间下的表示序列构建高斯金字塔。
12、可选地,所述高斯金字塔包括若干组结构,所述组结构包括若干层结构;其中,基于若干所述组结构构建高斯金字塔的过程包括:
13、s1、设置初始高斯平滑因子,基于所述初始高斯平滑因子和高斯卷积公式得到第n组结构的第m层结构的图像;
14、s2、基于更新公式对所述初始高斯平滑因子进行更新,得到更新高斯平滑因子,基于所述更新高斯平滑因子和所述高斯卷积公式得到第n组结构的第m+1层结构的图像;
15、s3、循环执行s2得到高斯金字塔第n组结构;
16、s4、对所述金字塔第n组结构的图像进行下采样得到第n+1组结构的第m层结构的图像;
17、s5、循环执行s2-s4得到第n+1组结构;
18、s6、基于若干所述组结构得到高斯金字塔。
19、可选地,所述高斯卷积公式为:
20、
21、式中,σ表示初始高斯平滑因子,g(x,y)表示点(x,y)处的高斯权重,x表示当前帧待计算权重点的横坐标,y表示当前帧待计算权重点的纵坐标,x0表示上一帧该点对应的横坐标,y0表示上一帧中该点对应的纵坐标;
22、所述更新公式为:
23、σ′=k*σ
24、式中,σ′表示更新后的高斯平滑因子,k表示比例系数。
25、可选地,所述高斯金字塔还包括差分金字塔;
26、基于所述差分金字塔检测特征点位置的过程包括:
27、获取第n组结构的第m层结构的层图像;
28、计算第m层结构的层图像分别与第m-1层结构的层图像、第m+1层结构的层图像的差分,得到若干差分图像;
29、基于若干所述差分图像得到第n组结构差分金字塔;
30、基于像素比较获取第n组结构差分金字塔的极值点;
31、对所述极值点采用二维高斯函数进行极值点相邻像素拟合得到特征点位置和特征点数量。
32、可选地,所述初始参量包括初始速度、加速度、数量阈值和面积阈值。
33、可选地,对所述巡检机器人的巡检速度进行自动控速的过程包括:
34、基于所述特征点进行隧道图像拼接,得到拼接图像;
35、计算重复图像面积在所述拼接图像中的占比,得到面积占比值;
36、基于所述特征点数量和所述面积占比值控制巡检机器人的巡检速度。
37、可选地,基于所述特征点数量和所述面积占比值控制巡检速度的条件包括:
38、当所述特征点数量小于所述数量阈值,则所述巡检机器人加速运动;
39、当所述特征点数量大于所述数量阈值且所述面积占比值大于所述面积阈值,则所述巡检机器人匀速运动;
40、当所述特征点数量大于所述数量阈值且所述面积占比值小于所述面积阈值,则所述巡检机器人减速运动。
41、可选地,巡检速度的控制公式为:
42、
43、式中,v表示初始速度,α表示加速度,v′表示变换后的速度,t表示时间,n表示特征点数量,n表示数量阈值,s表示面积占比值,ε表示面积阈值。
44、可选地,所述裂纹检测模型包括:fcn模型、u-net模型、segnet模型和pspnet模型。
45、本发明具有如下技术效果:
46、本专利提出了一种隧道巡检机器人自适应控速方法。采用了sift特征点提取法等图像处理的方法来构建特征金字塔从而实现裂纹特征提取。sift能够在不同尺度和旋转条件下保持稳定性,并且对光照变化和视角变化也具有一定的鲁棒性。sift算法能够准确地检测出关键点,这些关键点在图像中具有独特性,能够代表图像中的重要特征。这使得特征点匹配模型能够在复杂的场景中有效地找到匹配的特征点,实现高精度的图像匹配。sift算法具有尺度不变性,即无论目标在图像中的尺寸大小如何变化,sift算法都能够检测出对应的关键点。这使得特征点匹配模型在处理多尺度图像时具有优势,能够处理不同尺寸的目标物体。sift算法对于图像中的旋转变化也具有不变性,能够检测出具有相同特征的关键点。这使得特征点匹配模型能够在旋转变换下实现准确的匹配,对于物体的旋转姿态估计具有较好的效果。sift算法在光照变化和视角变化等情况下也能够保持较好的鲁棒性。这使得特征点匹配模型能够在不同环境下适应性强,对于光照变化和视角变化较大的场景中的特征点匹配具有较好的效果。
47、速度自控是一种自适应控制方法,可以根据系统当前状态和外部环境实时调整系统的运行速度,以达到更好的性能和效果。速度自控模型能够根据系统当前状态实时地调整运行速度。这使得系统能够及时响应变化,减少响应延迟,并能够处理实时性要求较高的任务。速度自控模型能够根据系统负载情况和任务要求,动态地调整运行速度。通过合理地分配资源,可以最大限度地提高系统的效率和性能,实现资源的优化利用。速度自控模型能够根据外部环境变化实时地调整运行速度,使系统在不同的工作条件下保持稳定。这使得系统能够适应环境的变化,提高系统的稳定性和可靠性。速度自控模型能够根据系统需求动态地调整运行速度,以适应不同的任务要求。这使得系统具有较强的灵活性,能够应对多样化的工作场景和任务需求。
48、特征点匹配模型采用sift特征点检测算法具有高精度、尺度不变性、旋转不变性和鲁棒性等技术效果。而速度自控模型则能够实现实时性、资源优化、稳定性和灵活性等技术效果。这些技术效果使得这两个模型在计算机视觉和自适应控制等领域具有广泛的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!