一种拖拉机悬挂机具电控装置的控制系统及操控方法与流程
本发明涉及一种拖拉机悬挂机具电控装置的控制系统及操控方法,属于拖拉机电控。
背景技术:
1、
2、现有技术当中,依靠高线束激光雷达以及全球定位系统已经基本实现拖拉机的自动行驶,然而拖拉机在田间作业是通过操控其悬挂机具进行田间翻土、播种、除草等工作,而这些工作经常需要根据田间的具体情况(如地头拐弯)进行调整,悬挂机具无法实现自动控制,也就无法实现拖拉机真正的自动驾驶,操控悬挂机具仍然是由驾驶员完成,操作复杂繁琐,驾驶员的操作难度高,工作量较大,工作舒适度低,并且工作效率不高。
技术实现思路
1、本发明针对背景技术中的不足,提供一种拖拉机悬挂机具电控装置的控制系统及操控方法,可以实现悬挂机具的自动控制,操控简单,工作效率高,并能够实现远程操控。
2、为解决以上技术问题,本发明采用以下技术方案:
3、一种拖拉机悬挂具电控装置的控制系统,包括单片机、can控制器、tcu控制器、操控手柄和控制电路,单片机通过控制电路实现对拖拉机悬挂机具的伸缩和提升的控制;
4、所述控制电路包括can收发电路、电源电路、单片机下载电路、晶振电路、电磁阀输出电路、模拟量输入电路和按键输入电路,所述电源电路对单片机和其他电路提供电源;
5、所述tcu控制器和can控制器通过can收发电路与单片机通信,操控手柄通过模拟量输入电路和按键输入电路对悬挂机具发出控制指令,can控制器通过can地址对悬挂机具发出控制指令;
6、所述单片机根据控制指令通过电磁阀输出电路发出动作指令,控制悬挂机具动作。
7、进一步地,所述操控手柄的按键包括模式旋钮、功能键、下降指示灯、下降键、上限位旋钮、强降按键、强降指示灯、备用旋钮、下限位旋钮、上升键、上升指示灯、四路多路阀收缩按键和伸出按键,收缩按键包括b1键、b2键、b3键、b4键,伸出按键包括a1键、a2键、a3键、a4键。
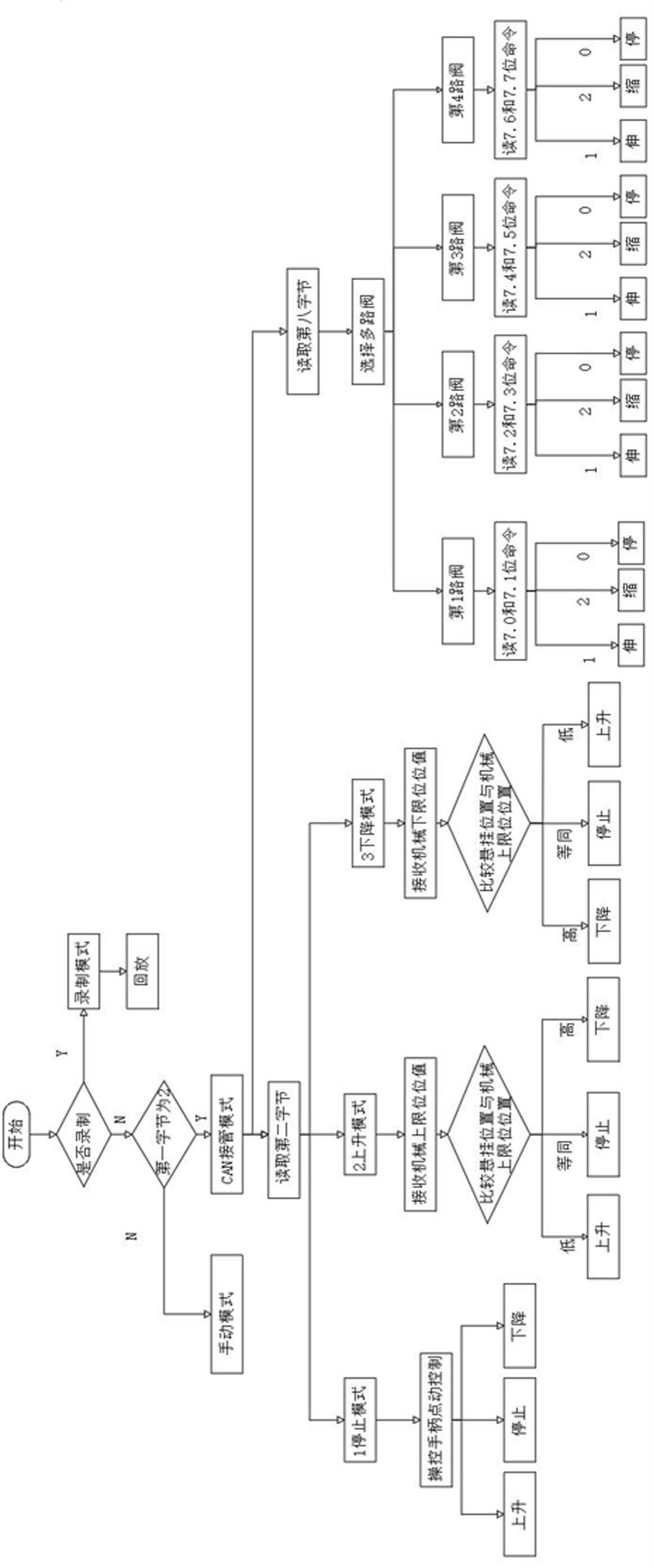
8、进一步地,包括can接管模式和手动模式,具体操作步骤如下:
9、首先会进行模式选择,模式选择通过定义can地址0x18000117来实现:
10、若can地址0x18000117的第一字节是2则进入can接管模式,若can地址0x18000117的第一字节是0则进入手动模式; can地址0x18000117的第一字节是2,则进入can接管模式;
11、在can接管模式下,悬挂机具的上升下降以及伸缩均是通过can地址0x18000117进行自动控制;
12、在手动模式下,手动模式又包括自学习模式和正常模式,先在自学习模式下进行标定后再进入正常模式下工作,在正常模式下,通过操作手柄控制悬挂机具的上升下降以及伸缩。
13、进一步地,在can接管模式下,悬挂机具的上升下降是通过can地址0x18000117的第二字节控制:当can地址0x18000117的第二字节是1时,进入停止模式;第二字节是2时,进入上升模式;第二字节是3时,进入下降模式;
14、在can接管模式下,悬挂机具伸缩通过can地址0x18000117的第八字节进行控制,每个字节有八位, 悬挂机具的每路多路阀占用两位,每路多路阀的对应值为1时多路阀伸出,为2时多路阀收缩,为0时多路阀不动作;
15、在can接管模式的停止模式下,可以通过控制手柄精确的点动制悬挂机具上升和下降,在此模式下不能通过can地址进行控制。
16、进一步地,自学习模式包括悬挂角度传感器标定、上限位旋钮标定和下限位旋钮标定;
17、悬挂角度传感器标定操作方法如下:长按功能键,直到指示灯s闪烁次,松开功能键按钮,按下上升键,直到悬挂机具上升到机械上限位,然后按a1键,机械上限位标定完成;然后再按下降键,直到悬挂机具下降到机械下限位,然后按b1键,机械下限位标定完成,再按其他键,悬挂角度传感器标定完成,程序自动退出悬挂标定模式;
18、上限位旋钮标定操作方法如下:长按功能键,直到指示灯1s闪烁2次,松开功能键,向左旋转上限位旋钮到极限,按a2键;向右旋转上限位旋钮到极限,按b2键;再按其他键,上限位旋钮标定完成,程序自动退出上限位旋钮标定;
19、下限位旋钮标定操作方法如下:长按功能键,直到指示灯1s闪烁3次,松开功能键,向左旋转下限位旋钮到极限,按a3键;向右旋转下限位旋钮到极限,按b3键;再按其他键,下限位旋钮标定完成,程序自动退出下限位旋钮标定。
20、进一步地,正常模式包括上升位置、停止位置和下降位置,通过转动模式旋钮进行切换;
21、将操控手柄的模式旋钮指针指到上升位置,控制系统会自动比对设定的机械上限位位置和悬挂机具位置,若悬挂机具位置低于机械上限位位置,悬挂机具就会上升到机械上限位位置;若悬挂机具位置与机械上限位位置在同等位置,悬挂机具会保持不动;若悬挂机具位置高于机械上限位位置,悬挂机具就会下降到机械上限位位置;
22、将操控手柄的模式旋钮指针指到下降位置,控制系统会自动对比设定的机械下限位位置和悬挂机具位置,若悬挂机具位置低于机械下限位位置,悬挂机具就会上升到与机械下限位位置;若悬挂机具位置与机械下限位位置在等同位置,悬挂机具将会保持不动;若悬挂机具位置高于机械下限位位置,悬挂机具就会下降到机械下限位位置。
23、进一步地,将操控手柄的模式旋钮指针指到停止位置,在停止位置下,又分为tcu控制器参与和tcu控制器不参与两种工作状态;判断tcu控制器是否参与是通过定义can地址0x18000217实现,若can地址0x18000217的第一字节是0时,则tcu控制器不参与,若can地址0x18000217的第一字节是2时,则tcu控制器参与;
24、tcu控制器不参与时,通过操控手柄操控悬挂机具,操作方法如下:按上升键悬挂机具上升,按下降键悬挂机具下降,调节上限位旋钮和下限位旋钮可以在最大极限位置以内调节悬挂机具的高度,四路多路阀a1-a4键是伸出,b1-b4键是收缩。
25、进一步地,tcu控制器参与时,通过定义can地址0x18000317实现对悬挂机具升降的控制,第一字节是2,第二字节是1时悬挂机具上升,是0时悬挂机具停止,是2时悬挂机具下降;
26、悬挂机具的伸缩通过can地址0x18000217的第四字节控制,每个字节有八位, 悬挂机具的每路多路阀占用两位,每路多路阀的对应值为1时多路阀伸出,为2时多路阀收缩,为0时多路阀不动作。
27、进一步地,tcu控制器参与时,通过传感器实时检测悬挂机具的扭矩和拉力,当扭矩或拉力变大时,tcu控制器对悬挂机具发出提升命令,保持一定时间后,同时tcu控制器控制变速箱降低档位,当扭矩或拉力变小,tcu控制器对悬挂机具发出下降命令,同时tcu控制器使变速箱上升档位。
28、进一步地,tcu控制器参与时,can地址0x18000317第四字节是4时,则进入地头模式,悬挂机具先提升到预设高度,拖拉机开始掉头,tcu控制器检测到拖拉机掉头完成后悬挂机具再下降回机械下限位位置,地头模式完成。
29、本发明采用以上技术方案后,与现有技术相比,具有以下优点:
30、 1.操作前,首先选择是否录制,如果选择录制,则进入录制模式,通过录制模式可以自动记录工作流程,当进行多次重复动作时,可以执行所述录制模式,自动重复保存的工作流程,驾驶员无需重复操作,便于自动化驾驶。
31、2.在不选择录制模式的前提下,所述拖拉机悬挂机具电控装置的操控方法包括can接管模式和手动模式,在can接管模式下定义can地址0x18000117,对不同的字节定义不同的功能,终端设备发出控制指令,可以实现对悬挂机具上升下降以及伸缩进行远程自动控制,无需人工坐在驾驶证进行现场调节和控制。
32、3.在手动模式下,手动模式又包括自学习模式和正常模式,自学习模式包括悬挂角度传感器标定,根据悬挂机具在田间的工作位置确定悬挂机具的机械上限位,在自学习模式下进行标定,根据标定位置,拖拉机在工作时使悬挂机具位于机械下限位,调头或不工作时使悬挂机具位于机械上限位,设定一次极限位置后即可方便地将悬挂机具调整到预定位置,更加方便快捷,有助于实现自动化无人操作。
33、4. 上限位旋钮5和下限位旋钮17的最大极限位置分别对应悬挂机具的机械上限位和机械下限位,转动上限位旋钮5和下限位旋钮17可以在最大极限位置以内调节。
34、5.正常模式包括上升位置、停止位置和下降位置,通过转动模式旋钮1进行切换,操控手柄的模式旋钮1在上升位置或下降位置时,上升键18和下降键4按钮不起作用,在上升位置或下降位置时,悬挂机具可以迅速到达机械上限位位置或机械下限位位置,不用进行调节,快捷方便。
35、6.正常模式下,将操控手柄的模式旋钮1指针指到停止位置,tcu控制器不参与时,通过操控手柄操控悬挂机具。
36、7.tcu控制器参与时,通过定义can地址0x18000317实现对悬挂机具升降的控制,tcu控制器参与可以解决驾驶频繁操作面板从而降低驾驶员的劳动力,tcu控制器参与由于是根据实际路况调整悬挂机具的状态,可以使作业标准化,保护农机具,对减小后续作业的修正,能更好具有智能、科学的管理田间。
37、8.tcu控制器参与模式下,can地址0x18000317第四字节是4时,进入地头模式,悬挂机具先提升到预设高度,拖拉机开始掉头,tcu控制器检测到拖拉机掉头完成后悬挂机具再下降回机械下限位,地头模式完成,地头模式是在拖拉机到达田间地头时完成自动调头。
38、下面结合附图和实施例对本发明进行详细说明。
- 还没有人留言评论。精彩留言会获得点赞!