面向无人船的智能续航控制系统及方法
本发明涉及无人船智能管理,具体涉及一种面向无人船的智能续航控制系统及方法。
背景技术:
1、当前,人类生活在以化石能源为主要动力能用的社会模式中,而消费化石能源伴生的环境污染问题日益显现。与此同时,近年来航运发展迅速,80%以上的国际贸易往来通过海上运输实现;每年全球远洋船舶排放的so2约占人为排放源的8.1%,nox约占排放总量的15.2%。未来若继续采用不可再生能源作为海上船舶的动力用能,将进一步使全球生态环境恶化。随着全球环境问题日益突出,对于船舶行业来说,寻找一种环保、高效的燃料已经成为一个迫切的需求。
技术实现思路
1、有鉴于此,有必要提供一种面向无人船的智能续航控制系统及方法,用以解决无人船在续航过程中对环境造成破坏的技术问题。
2、为了实现上述目的,第一方面,本发明提供了一种面向无人船的智能续航控制系统,包括:
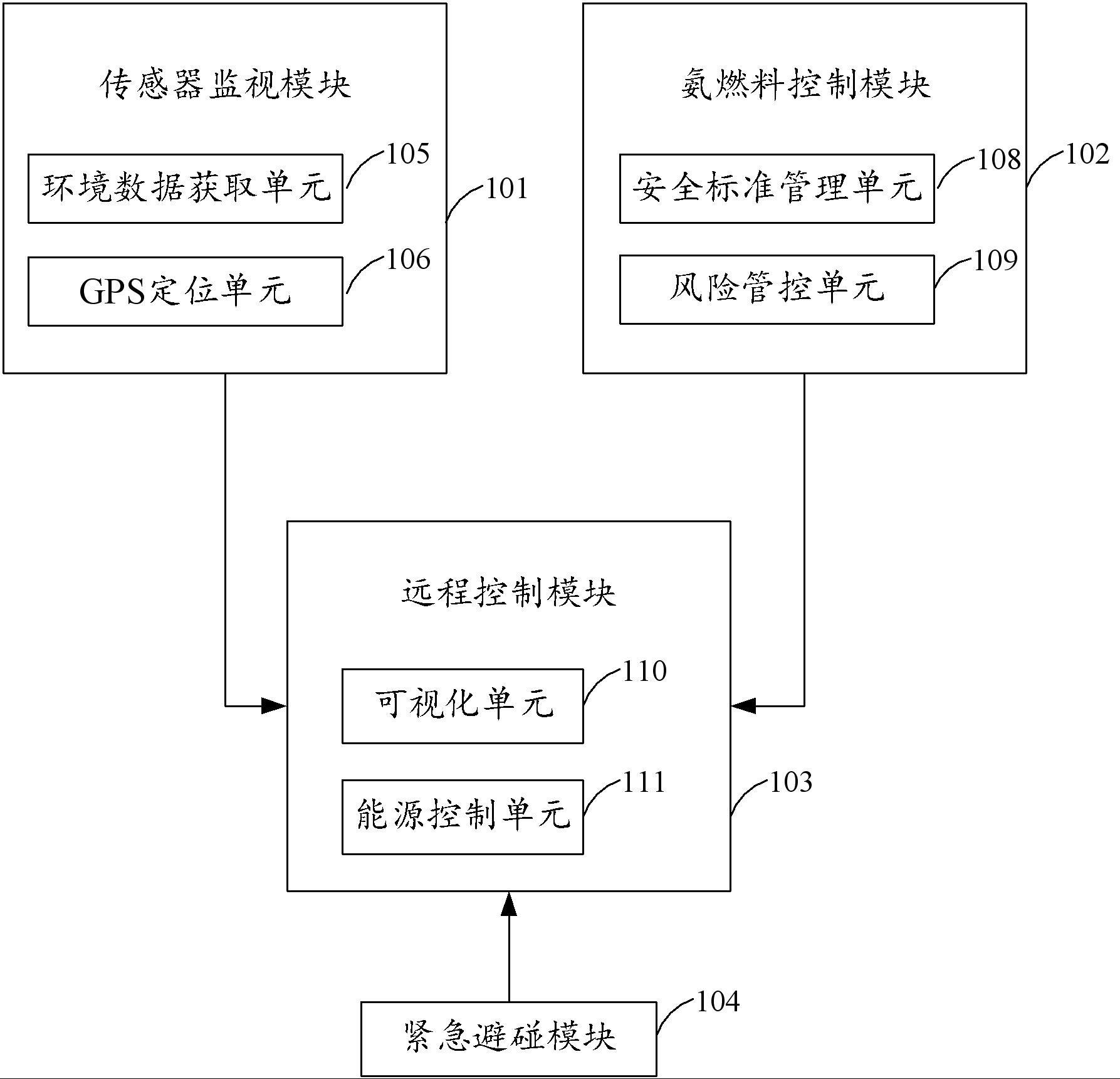
3、传感器监视模块,用于获取无人船周围的环境数据和无人船的定位数据,并将所述环境数据和所述无人船的定位数据发送至远程控制模块;
4、氨燃料控制模块,用于根据氨燃料对所述无人船提供动力时,对所述氨燃料的使用情况进行续航评估,得到无人船剩余续航时间和预警信号,并将所述无人船剩余续航时间和预警信号发送至远程控制模块;
5、远程控制模块,用于对所述环境数据、所述无人船的定位数据、所述无人船剩余续航时间以及预警信号进行解析,并对解析后的数据进行成像处理得到无人船运行状态画面,基于所述无人船运行状态画面生成无人船控制指令,并基于所述无人船控制指令实现续航控制操作。
6、在一个实施例中,所述环境数据包括:水流流向数据、水流流速数据以及风向变化数据;所述传感器监视模块,包括:
7、环境数据获取单元,用于对所述水流流向数据、水流流速数据以及风向变化数据进行预处理,得到预处理后的环境数据;
8、gps定位单元,用于获取所述无人船的运行状态数据,并对所述无人船的运行状态数据进行定位处理,得到无人船的定位数据。
9、在一个实施例中,所述氨燃料控制模块,包括:
10、安全标准管理单元,用于对氨燃料已使用量和氨燃料剩余存量的使用情况与预设的安全阈值进行比对,得到无人船氨燃料消耗评估数据和无人船续航动力数据;
11、风险管控单元,用于基于所述无人船氨燃料消耗评估数据和所述无人船续航动力数据进行自处理,得到无人船剩余续航时间和预警信号。
12、在一个实施例中,所述远程控制模块,包括:
13、可视化单元,用于基于所述解析后的数据进行数据分类,得到分类数据,对所述分类数据进行成像和显示处理,得到无人船运行状态画面;
14、能源控制单元,用于在氨能源供应不足的情况下,基于所述无人船运行状态画面确定无人船就近靠岸的控制指令,基于所述无人船就近靠岸的控制指令对所述无人船进行续航控制操作。
15、在一个实施例中,还包括紧急避碰模块,紧急避碰模块用于基于人工势场算法对所述环境数据和所述无人船的定位数据进行避碰路线规划,得到规划路线,并将所述规划路线发送至所述远程控制模块;
16、所述远程控制模块还用于基于所述规划路线进行成像处理得到无人船运行状态画面。
17、在一个实施例中,所述紧急避碰模块,还用于在无人船避碰紧急状态时,对所述无人船进行紧急转向。
18、在一个实施例中,所述紧急避碰模块,还用于在无人船避碰紧急状态时,对无人船内部设备进行自防护操作。
19、在一个实施例中,所述传感器监视模块,还用于对无人船进行数据管理,得到无人船的数据管理信息,并将所述无人船的数据管理信息发送至所述远程控制模块;所述无人船的数据管理信息包括:无人船编号数据和出海时间数据;
20、所述远程控制模块还用于基于所述无人船的数据管理信息进行成像处理得到无人船运行状态画面。
21、在一个实施例中,所述氨燃料控制模块,还用于对无人船的氨燃料浓度监测数据进行监测,得到氨燃料浓度监测数据,并将所述氨燃料浓度监测数据与预设的浓度安全阈值匹配,在所述氨燃料浓度监测数据大于预设的浓度安全阈值的情况下,发出氨燃料浓度过高信号至所述远程控制模块;
22、所述远程控制模块还用于基于所述氨燃料浓度过高信号对所述无人船进行通风操作。
23、第二方面,本发明还提供了一种面向无人船的智能续航方法,该方法包括:
24、基于传感器监视模块获取无人船周围的环境数据和无人船的定位数据,并将所述环境数据和所述无人船的定位数据发送至所述远程控制模块;
25、在根据氨燃料对所述无人船提供动力时,基于氨燃料控制模块对所述氨燃料的使用情况进行续航评估,得到无人船剩余续航时间和预警信号,并将所述无人船剩余续航时间和预警信号发送至所述远程控制模块;
26、基于远程控制模块对所述环境数据、所述无人船的定位数据、所述无人船剩余续航时间以及预警信号进行解析,并对解析后的数据进行成像处理得到无人船运行状态画面,基于所述无人船运行状态画面生成无人船控制指令以实现续航控制操作。
27、采用上述实现方式的有益效果是:本发明提出了一种面向无人船的智能续航控制系统及方法,系统包括:传感器监视模块,用于获取无人船周围的环境数据和无人船的定位数据,并将所述环境数据和所述无人船的定位数据发送至所述远程控制模块,氨燃料控制模块,用于根据氨燃料对所述无人船提供动力时,对所述氨燃料的使用情况进行续航评估,得到无人船剩余续航时间和预警信号,并将所述无人船剩余续航时间和预警信号发送至所述远程控制模块,远程控制模块,用于对所述环境数据、所述无人船的定位数据、所述无人船剩余续航时间以及预警信号进行解析,并对解析后的数据进行成像处理得到无人船运行状态画面,基于所述无人船运行状态画面生成无人船控制指令以实现续航控制操作。本申请主要通过传感器监视模块获取无人船周围的环境数据和无人船的定位数据,通过氨燃料控制模块为无人船提供动力以及对续航时间进行预测,最后通过远程控制模块基于无人船周围的环境数据和无人船的定位数据以及动力和续航时间的预测进行无人船运行状态画面呈现,通过工作人员登录无人船远程控制系统,观看无人船运行状态画面并发送无人船控制指令,无人船基于控制指令进行续航控制操作。相比于现有的技术方案,本申请提出了采用氨燃料作为无人船的动力,解决无人船在续航过程中对环境造成破坏的技术问题。
技术特征:
1.一种面向无人船的智能续航控制系统,其特征在于,包括:
2.根据权利要求1所述的面向无人船的智能续航控制系统,其特征在于,所述环境数据包括:水流流向数据、水流流速数据以及风向变化数据;所述传感器监视模块,包括:
3.根据权利要求1所述的面向无人船的智能续航控制系统,其特征在于,所述氨燃料控制模块,包括:
4.根据权利要求1所述的面向无人船的智能续航控制系统,其特征在于,所述远程控制模块,包括:
5.根据权利要求1所述的面向无人船的智能续航控制系统,其特征在于,还包括紧急避碰模块,紧急避碰模块用于基于人工势场算法对所述环境数据和所述无人船的定位数据进行避碰路线规划,得到规划路线,并将所述规划路线发送至所述远程控制模块;
6.根据权利要求5所述的面向无人船的智能续航控制系统,其特征在于,所述紧急避碰模块,还用于在无人船避碰紧急状态时,对所述无人船进行紧急转向。
7.根据权利要求5所述的面向无人船的智能续航控制系统,其特征在于,所述紧急避碰模块,还用于在无人船避碰紧急状态时,对无人船内部设备进行自防护操作。
8.根据权利要求1所述的面向无人船的智能续航控制系统,其特征在于,所述传感器监视模块,还用于对无人船进行数据管理,得到无人船的数据管理信息,并将所述无人船的数据管理信息发送至所述远程控制模块;所述无人船的数据管理信息包括:无人船编号数据和出海时间数据;
9.根据权利要求1所述的面向无人船的智能续航控制系统,其特征在于,所述氨燃料控制模块,还用于对无人船的氨燃料浓度监测数据进行监测,得到氨燃料浓度监测数据,并将所述氨燃料浓度监测数据与预设的浓度安全阈值匹配,在所述氨燃料浓度监测数据大于预设的浓度安全阈值的情况下,发出氨燃料浓度过高信号至所述远程控制模块;
10.一种面向无人船的智能续航方法,其特征在于,所述方法包括:
技术总结
本发明涉及一种面向无人船的智能续航控制系统及方法,系统包括:传感器监视模块,用于获取无人船周围的环境数据和无人船的定位数据,并将所述环境数据和所述无人船的定位数据发送至所述远程控制模块,氨燃料控制模块,用于根据氨燃料对所述无人船提供动力时,对所述氨燃料的使用情况进行续航评估,得到无人船剩余续航时间和预警信号,并将所述无人船剩余续航时间和预警信号发送至所述远程控制模块,远程控制模块,用于对所述环境数据、所述无人船的定位数据、所述无人船剩余续航时间以及预警信号进行解析,并对解析后的数据进行成像处理得到无人船运行状态画面,基于所述无人船运行状态画面生成无人船控制指令以实现续航控制操作。
技术研发人员:潘林,张根健
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!