一种无人船集群控制方法及相关设备
本说明书涉及无人船集群控制领域,更具体地说,本技术涉及一种无人船集群控制方法及相关设备。
背景技术:
1、现有的捕鱼方式通常是通过捕鱼船的声呐信息获取鱼群的方向,相关人员控制捕鱼船只到达鱼群的位置拖拽渔网进行捕捞,但是捕鱼船只无法对于鱼群的种类进行选择,同时在捕鱼的过程中需要捕鱼船冲向鱼群的移动路径对于捕鱼船的机动性和捕鱼船的能耗也是较大的挑战,严重影响捕鱼效率与经济性。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本技术的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、第一方面,本技术提出一种无人船集群控制方法,上述方法包括:
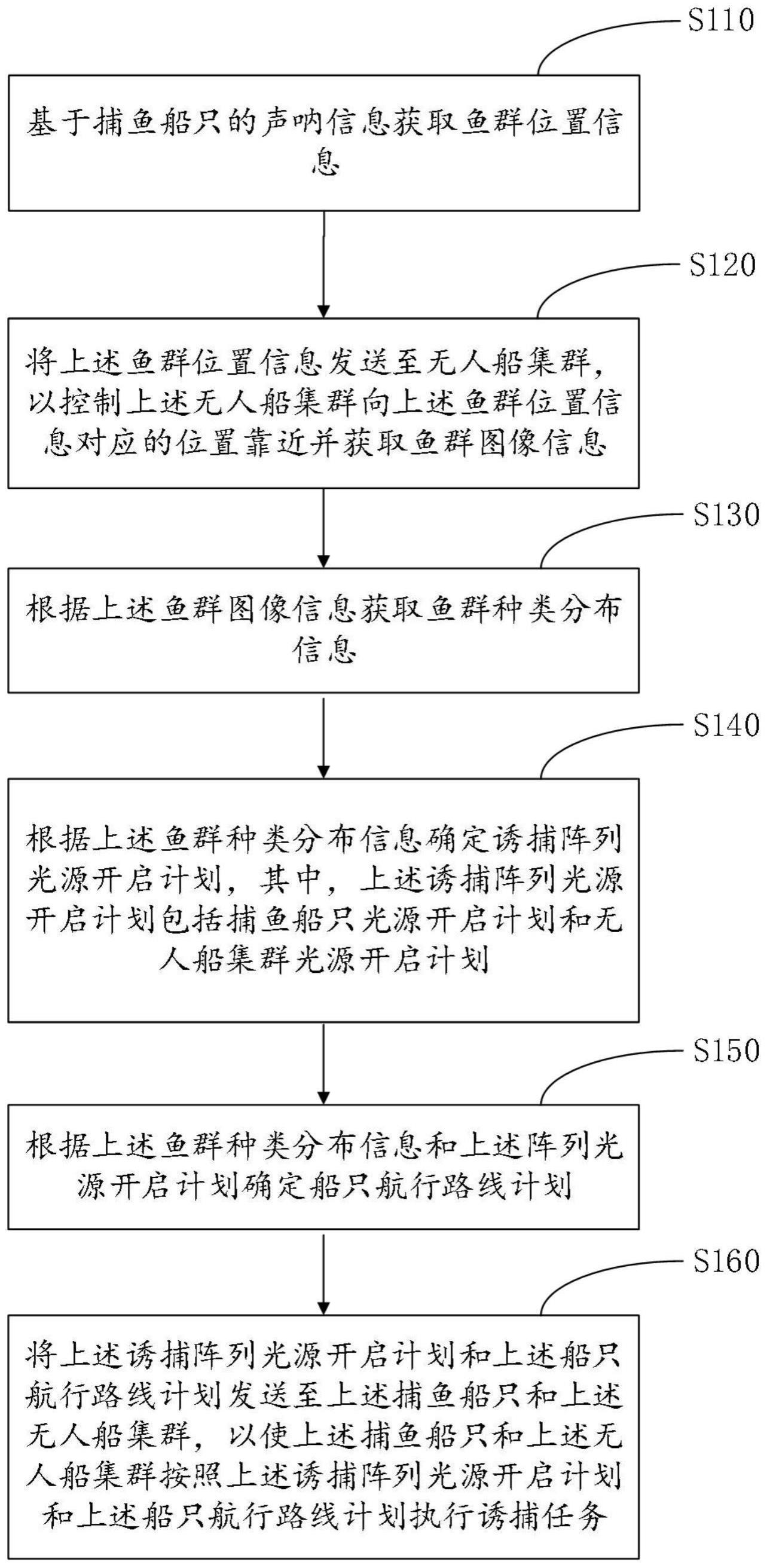
3、基于捕鱼船只的声呐信息获取鱼群位置信息;
4、将上述鱼群位置信息发送至无人船集群,以控制上述无人船集群向上述鱼群位置信息对应的位置靠近并获取鱼群图像信息;
5、根据上述鱼群图像信息获取鱼群种类分布信息;
6、根据上述鱼群种类分布信息确定诱捕阵列光源开启计划,其中,上述诱捕阵列光源开启计划包括捕鱼船只光源开启计划和无人船集群光源开启计划;
7、根据上述鱼群种类分布信息和上述阵列光源开启计划确定船只航行路线计划,其中,上述船只航行路线计划包括捕鱼船只航行路线计划和无人船集群航行计划;
8、将上述诱捕阵列光源开启计划和上述船只航行路线计划发送至上述捕鱼船只和上述无人船集群,以使上述捕鱼船只和上述无人船集群按照上述诱捕阵列光源开启计划和上述船只航行路线计划执行诱捕任务。
9、在一种实施方式中,上述根据上述鱼群图像信息获取鱼群种类分布信息,包括:
10、将上述鱼群图像信息输入至目标编码器以获取编码特征,其中,上述目标编码器包括两个深度可分离式卷积层,两个上述可分离式卷积层之间通过瓶颈层跳跃连接,每个上述深度可分离式卷积层对应不同的膨胀系数,上述深度可分离式卷积层包括深度方向卷积层、第一批归一化层、点卷积层、第二批归一化层和激活层;
11、将上述编码特征输入至目标解码器以获取图像特征信息,其中,上述目标解码器包括三组交叉设置的可分离残差块与插值采样层、卷积层和激活层;
12、根据上述图像特征信息获取上述鱼群种类分布信息。
13、在一种实施方式中,上述根据上述图像特征信息获取上述鱼群种类分布信息,包括:
14、爬取鱼类图像信息对应的图像特征信息;
15、对上述图像特征信息中的第一部分图像特征信息进行标注操作;
16、利用核函数将上述第一部分图像特性信息和第二部分图像特征信息映射至hilbert空间;
17、使用最大均值偏差量衡量第一部分图像特征信息和第二部分图像特征信息以实现特征迁移;
18、使用希尔伯特施密特独立标准度量特性信息与其类别标签之间的依赖程度从而获取待训练特征信息;
19、基于上述待训练特征信息对鱼群种类识别器进行训练;
20、根据训练后的鱼群种类识别器对上述特向特征信息进行识别以获取上述鱼群种类分布信息。
21、在一种实施方式中,上述根据上述鱼群种类分布信息确定诱捕阵列光源开启计划,包括:
22、根据上述鱼群种类分布信息确定目标诱捕鱼种的趋光特性;
23、根据上述鱼群种类分布信息确定目标诱捕鱼种的空间位置范围信息;
24、基于上述趋光特性、上述空间位置范围信息和捕鱼船只位置信息确定上述诱捕阵列光源开启计划。
25、在一种实施方式中,上述基于上述趋光特性、上述空间位置范围信息、捕鱼船只位置信息确定上述诱捕阵列光源开启计划,包括:
26、根据上述空间位置范围信息和上述捕鱼船只位置信息确定鱼群理想移动路径;
27、根据上述鱼群理想移动路径和上述趋光特性确定复合光源移动路径;
28、根据上述复合光源移动路径和光源位置信息进行光源矢量计算以确定上述诱捕阵列光源开启计划,其中,上述光源位置信息包括捕鱼船只位置信息和无人船集群位置信息。
29、在一种实施方式中,上述根据上述鱼群种类分布信息和上述阵列光源开启计划确定船只航行路线计划,包括:
30、上述根据上述鱼群种类分布信息和上述阵列光源开启计划确定光源强度需求信息;
31、基于上述光源强度需求信息确定船只航行路线计划。
32、在一种实施方式中,上述基于上述光源强度需求信息确定船只航行路线计划,包括:
33、基于上述光源强度需求信息确定可选择航行路线;
34、获取上述目标诱捕鱼种的聚集范围;
35、在上述可选择航行路线中基于上述目标诱捕鱼种的聚集范围确定船只航行对诱捕操作的干扰系数;
36、在上述可选择航行路线中选取较小的上述干扰系数对应的路线为上述船只航行路线计划。
37、第二方面,本技术还提出一种无人船集群控制装置,包括:
38、第一获取单元,用于基于捕鱼船只的声呐信息获取鱼群位置信息;
39、第一发送单元,用于将上述鱼群位置信息发送至无人船集群,以控制上述无人船集群向上述鱼群位置信息对应的位置靠近并获取鱼群图像信息;
40、第二获取单元,用于根据上述鱼群图像信息获取鱼群种类分布信息;
41、第一确定单元,用于根据上述鱼群种类分布信息确定诱捕阵列光源开启计划,其中,上述诱捕阵列光源开启计划包括捕鱼船只光源开启计划和无人船集群光源开启计划;
42、第二确定单元,用于根据上述鱼群种类分布信息和上述阵列光源开启计划确定船只航行路线计划,其中,上述船只航行路线计划包括捕鱼船只航行路线计划和无人船集群航行计划;
43、第二发送单元,用于将上述诱捕阵列光源开启计划和上述船只航行路线计划发送至上述捕鱼船只和上述无人船集群,以使上述捕鱼船只和上述无人船集群按照上述诱捕阵列光源开启计划和上述船只航行路线计划执行诱捕任务。
44、第三方面,一种电子设备,包括:存储器、处理器以及存储在上述存储器中并可在上述处理器上运行的计算机程序,上述处理器用于执行存储器中存储的计算机程序时实现如上述的第一方面任一项的无人船集群控制方法的步骤。
45、第四方面,本技术还提出一种计算机可读存储介质,其上存储有计算机程序,上述计算机程序被处理器执行时实现第一方面上述任一项的无人船集群控制方法。
46、综上,本技术实施例的无人船集群控制方法包括:基于捕鱼船只的声呐信息获取鱼群位置信息;将上述鱼群位置信息发送至无人船集群,以控制上述无人船集群向上述鱼群位置信息对应的位置靠近并获取鱼群图像信息;根据上述鱼群图像信息获取鱼群种类分布信息;根据上述鱼群种类分布信息确定诱捕阵列光源开启计划,其中,上述诱捕阵列光源开启计划包括捕鱼船只光源开启计划和无人船集群光源开启计划;根据上述鱼群种类分布信息和上述阵列光源开启计划确定船只航行路线计划,其中,上述船只航行路线计划包括捕鱼船只航行路线计划和无人船集群航行计划;将上述诱捕阵列光源开启计划和上述船只航行路线计划发送至上述捕鱼船只和上述无人船集群,以使上述捕鱼船只和上述无人船集群按照上述诱捕阵列光源开启计划和上述船只航行路线计划执行诱捕任务。本技术提出的无人船集群控制方法,通过智能捕捞,减少不必要的捕获和资源浪费。通过图像识别算法精确识别鱼群种类并有针对性地捕捞,可以帮助维护渔业资源的可持续性,防止过度捕捞和保护海洋生态系统。智能导航和光源策略的优化减少了捕鱼船只的航行距离和时间,从而减少了燃料消耗和碳排放,有助于降低对环境的不良影响,减少渔业活动对气候变化的影响。通过自动化和智能化的技术,整体方案减少了对人力资源的需求,降低了对专业捕鱼人员的依赖,同时提供了更安全和可控的捕鱼环境。通过优化光源开启计划和航行路线计划,该方案提高了捕获效率,能够更准确的鱼群位置信息和个性化的捕鱼策略有助于在较短的时间内捕获更多的鱼。本方案依赖声呐信息、图像分析和实时通信,为决策提供了数据支持,使得捕鱼船只和无人船集群能够根据实际情况做出即时决策,以优化捕鱼活动。减少了人力和燃料等资源的使用,整体方案有助于降低捕捞成本,对捕鱼行业的可持续性和盈利性都具有积极影响。
47、本技术提出的无人船集群控制方法,本技术的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本技术的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!