一种用于重载集装箱装卸搬运的智能机器人导航避障方法与流程
本发明涉及导航避障方法领域,具体指有一种用于重载集装箱装卸搬运的智能机器人导航避障方法。
背景技术:
1、在物料自动化装卸运输中,物料从供应地装入集装箱,从集装箱卸到目的地,需要搬运、装载基本功能实施用户要求。在物流过程中,装载卸货是非常重要的环节,随着现代货物装载运输技术的快速发展,越来越多的用户需要实现物料快速装载转运。重载集装箱装卸搬运的智能机器人可以是如图1所示,也可以是其他。重载集装箱装卸搬运的智能机器人的搬运过程中,需要从一个地点将货物搬运到另一个地点,在搬运的过程中可能出现各种障碍物或者搬运轨迹上的人员移动等,智能机器人此时需要通过导航避障算法进行导航与避障。
2、为了实现导航避障算法,现有的搬运智能机器人装有激光雷达,激光雷达可以扫描搬运智能机器人周围的环境,对环境建模,从而根据周围的环境在导航避障算法中计算得到避障方式以及导航的具体路径。然而,重载集装箱装卸搬运的智能机器人搬运的货物较大,如图1所示。货物在货叉上时,如图2所示,图2中阴影区域为激光雷达盲区,货物会遮挡激光雷达的扫描区域,从而出现较大的盲区,因而无法获得集装箱前侧的信息,同时由于重载集装箱装卸搬运的智能机器人的身体较大,机器人本身也会遮挡激光雷达下方及其周围的区域。在重载集装箱装卸搬运的智能机器人导航和避障的过程中,机器人下方及其周围、前侧的周围环境信息十分重要,现有技术为了解决该问题,在机器人的车身增加激光雷达从而减少盲区,然而仍然会被货物、车身等所遮挡,造成导航避障的结果不佳。
3、针对上述的现有技术存在的问题设计一种用于重载集装箱装卸搬运的智能机器人导航避障方法是本发明研究的目的。
技术实现思路
1、针对上述现有技术存在的问题,本发明在于提供一种用于重载集装箱装卸搬运的智能机器人导航避障方法,能够有效解决上述现有技术存在的至少一个问题。
2、本发明的技术方案是:
3、一种用于重载集装箱装卸搬运的智能机器人导航避障方法,所述智能机器人设置有主雷达、第一副雷达、第二副雷达,所述主雷达设置于所述智能机器人的上方,所述主雷达用于从所述智能机器人的上方探测所述智能机器人周围的环境,所述第一副雷达和所述第二副雷达分别设置于所述智能机器人的对角,所述第一副雷达和所述第二副雷达用于从所述智能机器人的侧方探测所述智能机器人周围的环境;所述方法包括以下步骤:
4、所述智能机器人前进入库取货后,控制所述智能机器人倒车出库,所述智能机器人倒车出库的过程中,通过所述主雷达、第一副雷达、第二副雷达扫描集装箱入口的轮廓和位置进行三维扫描,得到集装箱入口的三维数据,将所述三维数据作为所述智能机器人导航避障算法的地图数据;
5、通过所述导航避障算法控制所述智能机器人以后退方式行驶到靠近集装箱入口的位置,此时所述智能机器人的尾部朝向所述集装箱入口;
6、控制所述智能机器人旋转90°,使所述智能机器人的侧方朝向所述集装箱入口,控制所述智能机器人行驶至所述智能机器人的中心位于所述集装箱入口的中心线上;
7、控制所述智能机器人旋转90°,使所述智能机器人的前方朝向所述集装箱入口,控制所述智能机器人前进进入所述集装箱入口;
8、控制所述智能机器人行驶到集装箱内的预定位置并放下货物。
9、进一步地,所述集装箱入口通过坡度板与月台连接,所述智能机器人设置有imu传感器和轮式编码器;
10、所述控制所述智能机器人前进进入所述集装箱入口包括:
11、在所述智能机器人经过所述坡度板时,通过所述imu传感器和所述轮式编码器校正所述智能机器人的里程信息,以及通过所述imu传感器的数据实时调整货物的俯仰角,使所述货物保持水平。
12、进一步地,所述智能机器人前进入库取货之前,包括:获取或设置所述智能机器人的避障范围,设置所述主雷达、所述第一副雷达、所述第二副雷达的盲区范围;
13、所述通过所述导航避障算法控制所述智能机器人以后退方式行驶到靠近集装箱入口的位置、所述控制所述智能机器人行驶至所述智能机器人的中心位于所述集装箱入口的中心线上、所述控制所述智能机器人前进进入所述集装箱入口的过程中,包括:
14、获取所述主雷达、所述第一副雷达、所述第二副雷达分别返回的数据,根据所述主雷达、所述第一副雷达、所述第二副雷达与所述智能机器人中心的位置变换关系,将所述返回的数据根据所述位置变换关系换算为以所述智能机器人中心的距离信息;
15、若所述距离信息处于所述盲区范围外,则采用所述主雷达返回的数据作为导航避障算法的输入数据;
16、若所述距离信息处于所述盲区范围内,则采用最小的距离对应的雷达返回的数据作为导航避障算法的输入数据。
17、进一步地,所述主雷达设置于所述智能机器人的纵向中线上,所述主雷达的扫描范围为竖直-a°~b°,所述主雷达的高度h被配置为:所述主雷达的高度h小于货物被所述智能机器人托起时的最高点,以及所述主雷达的扫描范围不触及所述智能机器人的后端或侧端,-a°表示扫描范围在雷达高度的水平面以下的部分,b°表示扫描范围在雷达高度的水平面以上的部分。
18、进一步地,所述盲区范围包括主雷达地面盲区范围,所述主雷达地面盲区范围满足:
19、获取所述主雷达的高度h;
20、所述主雷达地面盲区范围的半径。
21、进一步地,包括第一测距传感器,所述第一测距传感器用于获得所述智能机器人的前方和侧方与周围物体之间的距离;
22、控制所述智能机器人行驶到集装箱内的预定位置并放下货物包括:
23、通过所述第一测距传感器获取所述智能机器人和前方物体之间的距离、所述智能机器人和所述集装箱侧壁的距离,计算得到所述智能机器人在集装箱内的实时位置,控制所述智能机器人在集装箱内行驶到预定位置并放下货物。
24、进一步地,所述智能机器人的前方设置有货叉,所述智能机器人的货叉的前端设置有第二测距传感器,所述第二测距传感器用于获得所述货叉的前方和侧方与周围物体之间的距离;
25、控制所述智能机器人在集装箱内行驶到预定位置之后,放下货物之前包括:
26、若预定位置存在前方货物,则通过所述第二测距传感器寻找前方货物的托盘孔位,控制所述智能机器人的货叉对准所述托盘孔位。
27、进一步地,所述智能机器人前进入库取货后,控制所述智能机器人倒车出库之前,执行:
28、控制所述货叉俯仰,使货叉上的货物靠拢于所述货叉的后端,暴露所述第二测距传感器。
29、进一步地,所述将所述三维数据作为所述智能机器人导航避障算法的地图数据之后,包括:
30、在所述地图数据中对应所述集装箱入口处进行埋点标记,所述标记位于所述集装箱入口的中心线上,所述标记与所述集装箱入口的距离大于所述主雷达到所述智能机器人前段的距离。
31、进一步地,通过人工在所述地图数据中对应所述集装箱入口处进行埋点标记;或者,通过所述集装箱入口的形状识别在所述地图数据中对应所述集装箱入口处进行埋点标记。
32、因此,本发明提供以下的效果:
33、本技术克服了月台的宽度小,以及智能机器人的视野盲区大于智能机器人的底面积,视野盲区与月台边缘之间的距离较小,而且由于主雷达被货物及智能机器人遮挡一部分,如果智能机器人以前进的方式行驶则无法获得集装箱前侧的信息的问题。先通过控制所述智能机器人倒车出库,使主雷达能够对集装箱入口的轮廓和位置进行三维扫描,再通过智能机器人旋转,然后使所述智能机器人的侧方朝向所述集装箱入口。使所述智能机器人的侧方朝向所述集装箱入口,在智能机器人的侧方朝向所述集装箱入口的状态下,可以利用主雷达和副雷达在智能机器人的侧方的盲区较小的特点,充分获取周围环境信息,控制所述智能机器人旋转90°,使所述智能机器人的前方朝向所述集装箱入口,即可找到集装箱入口处,使智能机器人能够在雷达被遮挡的情况下行驶到正对集装箱入口的位置。
34、本技术通过所述imu传感器的数据实时调整货物的俯仰角,使货叉保持水平,从而使所述货物保持水平,可以保持货物不脱离货叉。
35、本技术通过视野盲区、避障范围的配合,在不同的情况下选择不同的雷达数据,可以更精准的获得环境情况。
36、本技术通过第一测距传感器,配合集装箱内的环境情况,从而在智能机器人进入集装箱内后,转为通过第一测距传感器换算处智能机器人在集装箱内的位置。
37、本技术通过第二测距传感器,可以方便地找到托盘孔位,使智能机器人在搬运货物时,通过托盘孔位对其当前搬运的货物,使集装箱内的货物更加整齐。在集装箱内使用价格较为低廉的超声传感器与激光测距传感器在这一特定场景下能够实现对机器人的定位,相比于追求通过视觉或者激光雷达进行集装箱内定位的方式,更加节约成本。
38、应当明白,本发明的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本发明的进一步的解释。
39、附图说明
40、图1为现有智能机器人的结构示意图。
41、图2为现有技术中,雷达盲区示意图。
42、图3为本发明的实施例的智能机器人其中一个视角的示意图。
43、图4为为本发明的实施例的智能机器人另一个视角的示意图。
44、图5为智能机器人的正视视角下各个雷达的覆盖区域示意图。
45、图6为智能机器人的俯视视角下各个雷达的覆盖区域示意图。
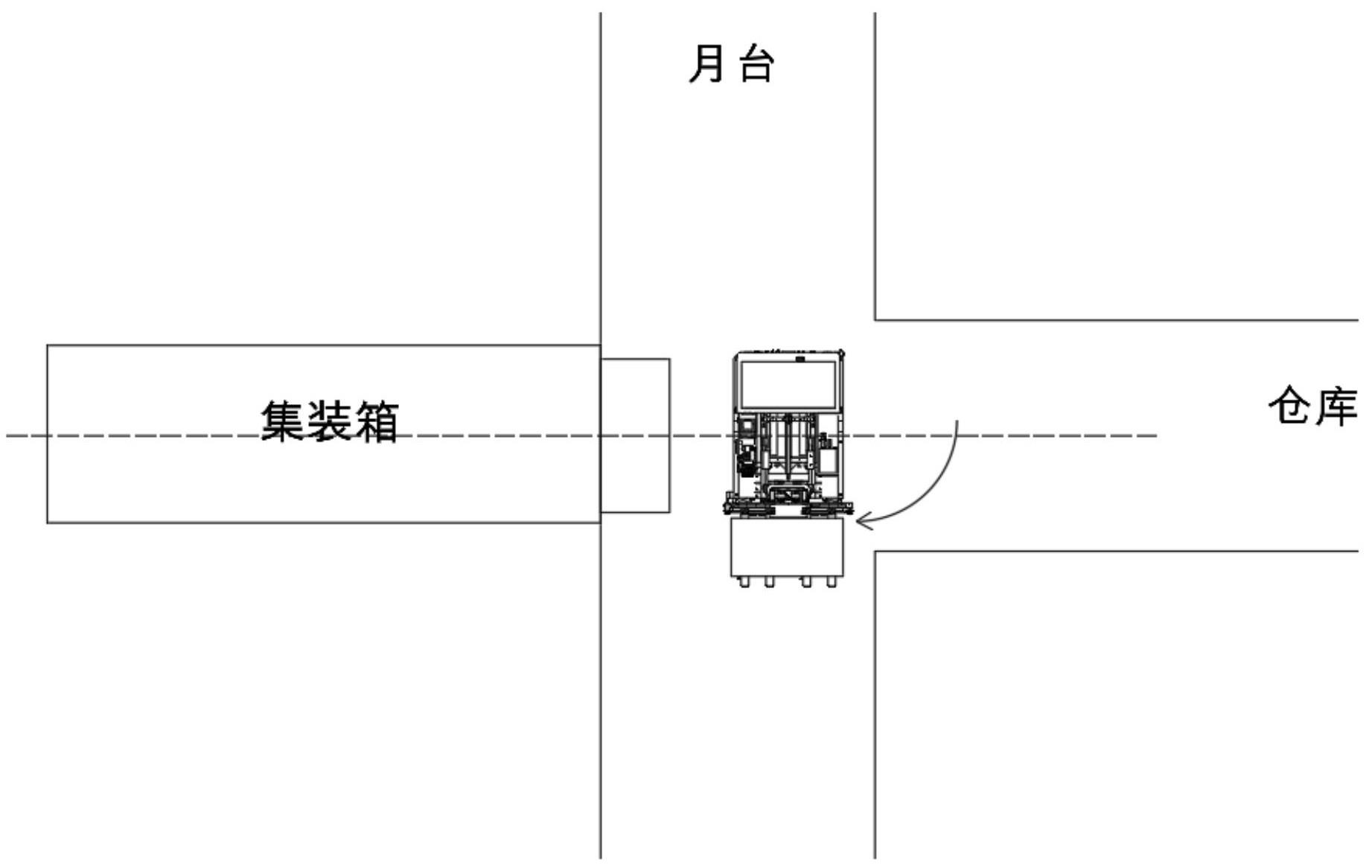
46、图7为智能机器人在仓库中的状态示意图。
47、图8为执行步骤s1后的智能机器人状态示意图。
48、图9为雷达扫描得到的数据示意图。
49、图10为雷达扫描得到的数据示意图。
50、图11为三维扫描后得集装箱的尺寸示意图。
51、图12为执行步骤s3后的智能机器人状态示意图。
52、图13为执行步骤s4后的智能机器人状态示意图。
53、图14为避障范围示意图。
54、图15为获取距离信息以及距离信息的采用逻辑示意图。
55、图16为智能机器人进入集装箱内的状态示意图。
- 还没有人留言评论。精彩留言会获得点赞!