割草机器人的割草规划方法、电子设备和存储介质与流程
本申请涉及路径规划的,尤其涉及一种割草机器人的割草规划方法、电子设备和存储介质。
背景技术:
1、割草机器人是一种用于自动修剪草坪的智能设备,能够代替用户执行割草任务,解放了用户的劳动力。
2、在相关技术中,在割草机器人进行割草操作之前,需要根据草坪以及草坪内的固定障碍物预先规划割草路径,从而割草机器人能够沿着预先规划的割草路径对草坪进行割草操作。然而,割草机器人在进行割草操作的过程中可能会遇到临时障碍物,导致割草机器人无法对被临时障碍物遮挡的草坪进行割草操作,使得草坪中存在未割草的区域。因此,割草机器人可能需要在临时障碍物前等待临时障碍物移除再继续进行割草操作,或者,在割草机器人根据预先规划的割草路径完成割草操作之后,需要用户操作割草机器人手动对未割草的区域进行补割,导致割草的效率较低。
技术实现思路
1、本申请提供一种割草机器人的割草规划方法、电子设备和存储介质,以解决需要用户操作割草机器人手动对未割草的区域进行补割的问题,实现了割草机器人自动对未割草的区域进行补割,提高了割草的效率。
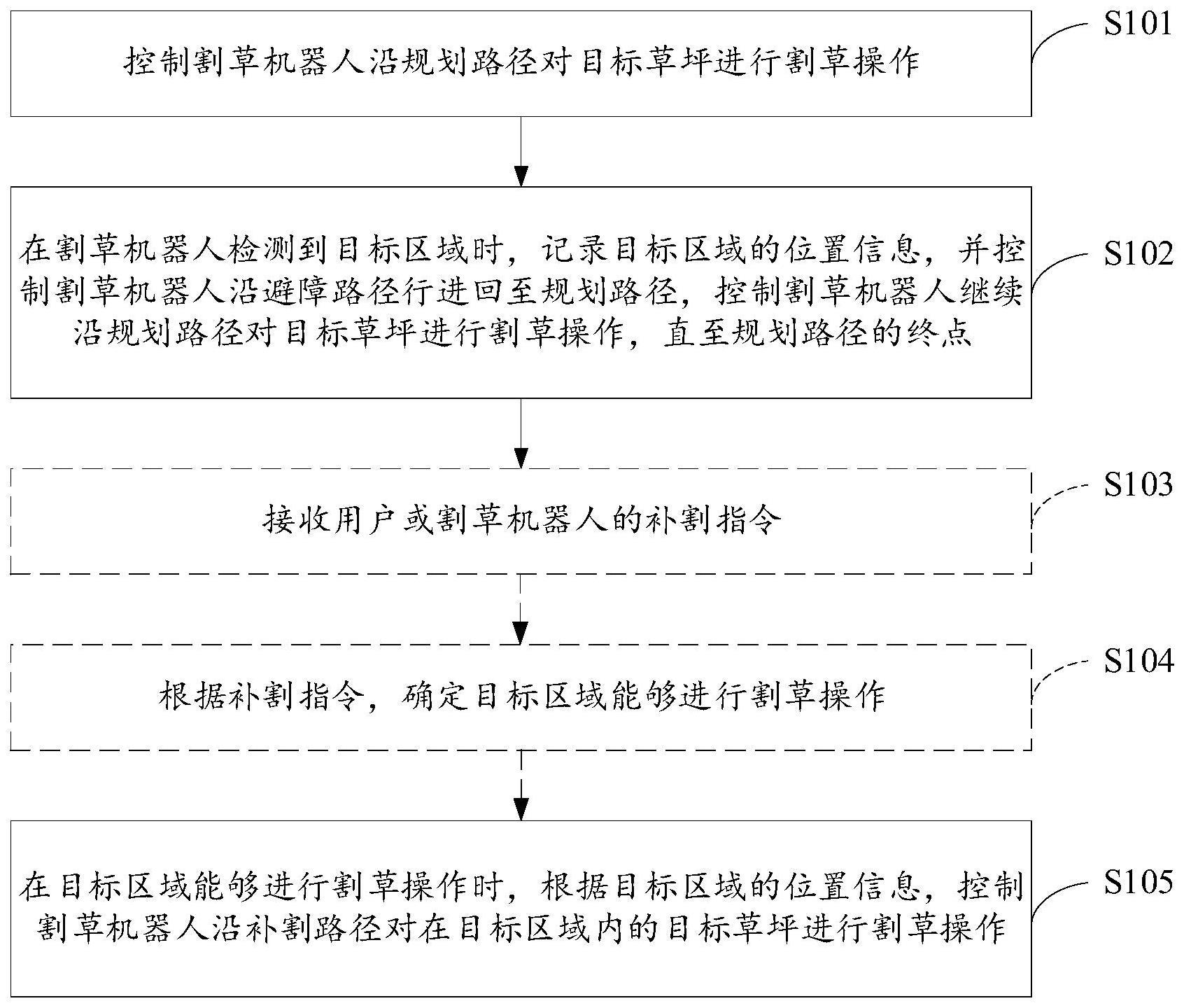
2、第一方面,本申请提供一种割草机器人的割草规划方法,包括:
3、控制割草机器人沿规划路径对目标草坪进行割草操作;
4、在所述割草机器人检测到目标区域时,记录目标区域的位置信息,所述目标区域包括障碍物和/或临时不能进行割草操作的区域,并控制所述割草机器人沿避障路径行进回至所述规划路径,控制所述割草机器人继续沿所述规划路径对所述目标草坪进行割草操作,直至所述规划路径的终点,所述避障路径用于避开所述目标区域,所述避障路径的起点和终点位于所述规划路径上;
5、在所述目标区域能够进行割草操作时,根据所述目标区域的位置信息,控制所述割草机器人沿补割路径对在所述目标区域内的所述目标草坪进行割草操作,所述补割路径的起点与所述割草机器人之间的距离最小。
6、通过第一方面提供的方法,割草规划装置控制割草机器人沿规划路径对目标草坪进行割草操作,在割草机器人检测到目标区域时,记录目标区域的位置信息,目标区域包括障碍物和/或临时不能进行割草操作的区域,割草规划装置控制割草机器人沿避障路径行进回至规划路径,控制割草机器人继续沿规划路径对目标草坪进行割草操作,直至规划路径的终点,从而使得割草机器人能够避开暂时不能进行割草操作的区域,无需在原地等待目标区域能够进行割草操作,而是直接对其他区域进行割草操作,能够节省时间,提升割草的效率。在目标区域能够进行割草操作时,割草规划装置根据目标区域的位置信息,控制割草机器人沿补割路径对在目标区域内的目标草坪进行割草操作,补割路径的起点与割草机器人之间的距离最小,使得割草机器人在沿规划路径完成割草操作后,以最短距离和最快速度到达目标区域,集中处理目标区域内未割草的目标草坪,无需人工参与对目标区域的补割,从而节省了割草的时间,提高了割草的效率。
7、在一种可能的设计中,在所述目标区域包括多个子区域时,所述方法还包括:
8、创建所述多个子区域的补割路径。
9、在一种可能的设计中,在所述多个子区域包括第一子区域和第二子区域时,创建所述多个子区域的补割路径,包括:
10、在所述第一子区域与所述割草机器人之间的距离最小时,确定所述第一子区域的起点和所述第一子区域的终点;
11、确定所述第二子区域的起点和所述第二子区域的终点,所述第二子区域的起点与所述第一子区域的终点之间的距离最小;
12、将所述第一子区域的起点、所述第一子区域的终点、所述第二子区域的起点和所述第二子区域的终点依次连接,生成所述多个子区域的补割路径。
13、从而,能够使得割草机器人从第一子区域到第二子区域的需要运行的距离最短,使得创建的多个子区域的补割路径的长度最短,从而节省割草规划装置控制割草机器人沿多个子区域的补割路径进行割草操作的时间,提高了割草效率。
14、在一种可能的设计中,所述补割路径为所述规划路径中未进行割草操作的路径。
15、从而,通过采用上述方案,割草机器人沿补割路径进行割草操作时可以完全覆盖未割草的区域,且不对已经割过的草坪进行二次割草,避免了二次割草后影响割草效果的问题,提高了割草的效果。
16、在一种可能的设计中,所述目标区域的位置信息与所述规划路径相关。
17、在一种可能的设计中,在所述目标区域包括多个子区域时,针对每个子区域而言,记录目标区域的位置信息,包括:
18、记录所述子区域的起始坐标,所述起始坐标为所述割草机器人第一次检测到所述子区域时所述规划路径上的坐标;
19、记录所述子区域的终止坐标,所述终止坐标为所述割草机器人沿所述避障路径行进回至所述规划路径时所述规划路径上的坐标。
20、从而,通过采用上述方案,能够使得子区域内的补割路径最短,割草规划装置控制割草机器人沿补割路径对在子区域内的目标草坪进行割草操作,保证了子区域内的割草效果,提高了割草的效率。
21、在一种可能的设计中,所述避障路径为沿所述目标区域的边缘形成的路径。
22、从而,割草规划装置控制割草机器人沿目标区域的边缘形成的路径避开目标区域,可以保证避开目标区域行进的路径最短,节省了避障时间,提高割草的效率。
23、在一种可能的设计中,所述方法还包括:
24、接收用户或割草机器人的补割指令;
25、根据所述补割指令,确定所述目标区域能够进行割草操作。
26、第二方面,本申请提供一种割草规划装置,包括:控制模块,用于控制割草机器人沿规划路径对目标草坪进行割草操作。记录模块,用于在割草机器人检测到目标区域时,记录目标区域的位置信息,目标区域包括障碍物和/或临时不能进行割草操作的区域,并控制割草机器人沿避障路径行进回至规划路径,控制割草机器人继续沿规划路径对目标草坪进行割草操作,直至规划路径的终点,避障路径用于避开目标区域,避障路径的起点和终点位于规划路径上。补割模块,用于在目标区域能够进行割草操作时,根据目标区域的位置信息,控制割草机器人沿补割路径对在目标区域内的目标草坪进行割草操作,补割路径的起点与割草机器人之间的距离最小。
27、第三方面,本申请提供一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的割草机器人的割草规划方法。
28、第四方面,本申请提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时,实现如本申请实施例的第一方面提供的割草机器人的割草规划方法。
29、上述说明仅是本申请实施例技术方案的概述,为了能够更清楚了解本申请实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本申请实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种割草机器人的割草规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在所述目标区域包括多个子区域时,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,在所述多个子区域包括第一子区域和第二子区域时,创建所述多个子区域的补割路径,包括:
4.根据权利要求1-3任一项所述的方法,其特征在于,所述补割路径为所述规划路径中未进行割草操作的路径。
5.根据权利要求1-3任一项所述的方法,其特征在于,所述目标区域的位置信息与所述规划路径相关。
6.根据权利要求5所述的方法,其特征在于,在所述目标区域包括多个子区域时,针对每个子区域而言,记录目标区域的位置信息,包括:
7.根据权利要求1-3任一项所述的方法,其特征在于,所述避障路径为沿所述目标区域的边缘形成的路径。
8.根据权利要求1-3任一项所述的方法,其特征在于,所述方法还包括:
9.一种电子设备,其特征在于,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求1-8任一项所述的割草机器人的割草规划方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-8任一项所述的割草机器人的割草规划方法。
技术总结
本申请提供一种割草机器人的割草规划方法、电子设备和存储介质。该方法包括:控制割草机器人沿规划路径对目标草坪进行割草操作,在割草机器人检测到目标区域时,记录目标区域的位置信息,目标区域包括障碍物和/或临时不能进行割草操作的区域,并控制割草机器人沿避障路径行进回至规划路径,控制割草机器人继续沿规划路径对目标草坪进行割草操作,直至规划路径的终点,在目标区域能够进行割草操作时,根据目标区域的位置信息,控制割草机器人沿补割路径对在目标区域内的目标草坪进行割草操作,补割路径的起点与割草机器人之间的距离最小。从而实现了割草机器人自动对未割草的区域进行补割,提高了割草的效率。
技术研发人员:苏航,李建勇,顾杰夫,赵珣,范佳斌
受保护的技术使用者:优思美地(上海)机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!