一种基于多智能体的温度场控制系统及方法与流程
本申请属于热强度试验控制领域,特别涉及一种基于多智能体的温度场控制系统及方法。
背景技术:
1、高超声速飞行器飞行时,机体在气流摩擦下会产生高温,使其内外表面形成温度梯度。为确认热冲击及高温热应力破坏对飞行器的影响,须对高超声速飞行器进行热强度试验。高超声速飞行器热强度试验一般采用石英灯管作为加热元件。温度场的均匀性取决于石英灯管的输出功率、石英灯管的间距以及石英灯管与试验件的距离,以往试验系统中石英灯管采用固定夹具安装,试验过程中灯管的间距、灯管与试验件的距离保持不变,其数值通过计算-仿真迭代收敛确定,这种方式不能把石英灯管以外的其他环节纳入仿真过程,对于系统的大幅简化使得仿真结果偏差较大,而且仿真计算只能仿真开环过程,而非真实的闭环调节加温过程,仿真结果不可靠,同时高超声速飞机加温试验的温度载荷往往不是恒定的载荷值,而是随时间变化的载荷曲线,加温过程不存在稳态,而是始终处于动态调节的过程,结合外界环境温度扰动影响,试验要求加温全过程温度场保持均匀,采用上述方法无法满足要求。
2、因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现思路
1、本申请的目的是提供了一种基于多智能体的温度场控制系统及方法,以解决现有技术存在的至少一个问题。
2、本申请的技术方案是:
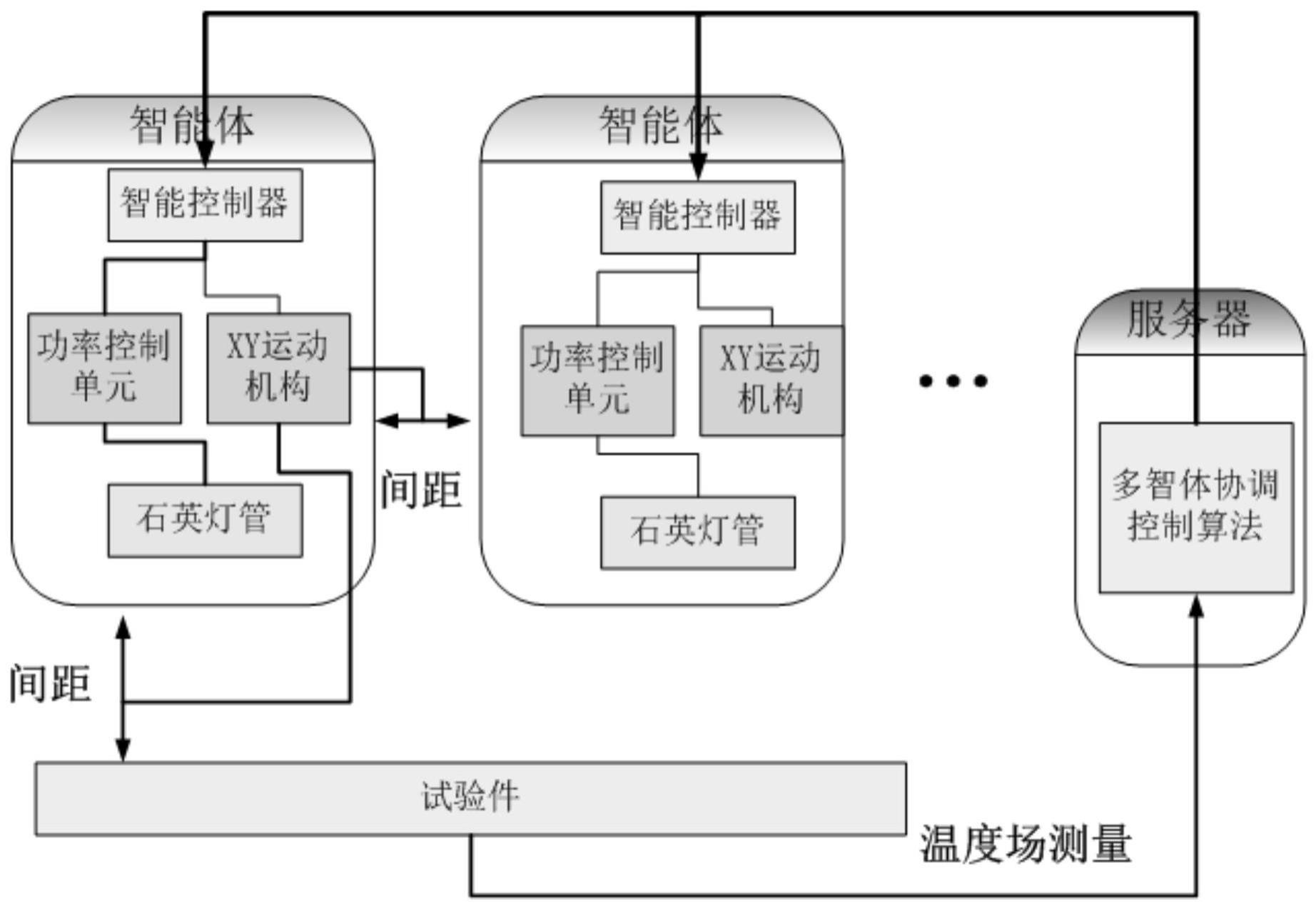
3、本申请的第一个方面提供了一种基于多智能体的温度场控制系统,包括:
4、智能体模块,包括多个,每个所述智能体模块包括:
5、发热元件,用于加热模拟试验件;
6、功率控制单元,用于控制所述发热元件的输出功率;
7、运动机构,用于控制所述智能体模块运动;
8、智能控制器,用于通过所述功率控制单元控制所述发热元件到达预定的输出功率;还用于通过所述运动机构控制所述智能体模块与所述模拟试验件之间的距离,以及该智能体模块与其他智能体模块之间的距离。
9、在本申请的至少一个实施例中,所述发热元件为石英灯管。
10、在本申请的至少一个实施例中,所述功率控制单元为可控硅功率控制器。
11、在本申请的至少一个实施例中,所述运动机构包括x方向运动机构以及y方向运动机构,其中,
12、所述x方向运动机构包括x方向滚珠丝杠、第一伺服电机、第一伺服电机控制器、x方向位移传感器,所述x方向运动机构用于控制所述智能体模块在x方向上运动;
13、所述y方向运动机构包括y方向滚珠丝杠、第二伺服电机、第二伺服电机控制器、y方向位移传感器,所述y方向运动机构用于控制所述智能体模块在y方向上运动。
14、本申请的第二个方面提供了一种基于多智能体的温度场控制方法,基于如上所述的基于多智能体的温度场控制系统,包括:
15、步骤一、将随时间变化的温度场根据温度梯度进行简化,并将简化后的温度场划分为具有相同区域内温度的多个单一温度场;
16、步骤二、将各个单一温度场均匀划分为多个温度分区,并在每个所述温度分区中布置温度传感器以及智能体模块;
17、步骤三、以发热元件的功率为第一优先变量,以发热元件与模拟试验件之间的距离作为第二优先变量,以发热元件在每个温度分区中的坐标为第三优先变量,实现温度场的温度均匀性控制。
18、发明至少存在以下有益技术效果:
19、本申请的基于多智能体的温度场控制系统,通过单智能体自适应技术,每个智能体自主调节与其他智能体的距离,并自主调节与模拟试验件的距离,自主调节石英灯管的输出功率,结合多智能体协调控制技术,保证高温加载过程中温度场的均匀性,提高温度控制精度。
技术特征:
1.一种基于多智能体的温度场控制系统,其特征在于,包括:
2.根据权利要求1所述的基于多智能体的温度场控制系统,其特征在于,所述发热元件为石英灯管。
3.根据权利要求2所述的基于多智能体的温度场控制系统,其特征在于,所述功率控制单元为可控硅功率控制器。
4.根据权利要求3所述的基于多智能体的温度场控制系统,其特征在于,所述运动机构包括x方向运动机构以及y方向运动机构,其中,
5.一种基于多智能体的温度场控制方法,基于权利要求1至4任意一项所述的基于多智能体的温度场控制系统,其特征在于,包括:
技术总结
本申请属于热强度试验控制领域,特别涉及一种基于多智能体的温度场控制系统及方法。系统包括:智能体模块,包括多个,每个所述智能体模块包括:发热元件,用于加热模拟试验件;功率控制单元,用于控制所述发热元件的输出功率;运动机构,用于控制所述智能体模块运动;智能控制器,用于通过所述功率控制单元控制所述发热元件到达预定的输出功率;还用于通过所述运动机构控制所述智能体模块与所述模拟试验件之间的距离,以及该智能体模块与其他智能体模块之间的距离。本申请中每个智能体自主调节与其他智能体的距离,并自主调节与模拟试验件的距离,自主调节石英灯管的输出功率,保证高温加载过程中温度场的均匀性,提高温度控制精度。
技术研发人员:郭小鹏,李炳秀,张发明
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!