光伏电板伺服系统的有限时间命令滤波控制方法及系统
本技术属于新能源,具体涉及光伏电板伺服系统的有限时间命令滤波控制方法及系统。
背景技术:
1、随着气候变化和可再生能源的兴起,光伏技术得到了越来越广泛的应用。光伏电板是一种将太阳能转换成电能的设备,因其环保、可再生、安全等优点而受到广泛关注。在国外,欧洲和美国是主要的光伏市场,目前已经形成了比较成熟的光伏产业链。光伏电板的制造、组装、销售等环节已经实现了规模化生产,并且在应用领域也逐渐拓展到建筑、交通等领域。光伏电板的技术发展也呈现出多样化和高效化的趋势,新型的光伏电板材料、光伏电池技术和光伏电板系统的设计和优化等方面都取得了重要进展。
2、目前,在光伏电板技术方面,主要存在以下几个方面的研究:(1)光伏电池技术:光伏电池是将光能转化为电能的核心部件,因此光伏电池的技术水平直接影响光伏电板的性能。随着光伏技术的不断发展,新型的光伏电池技术层出不穷,例如有机太阳能电池、钙钛矿太阳能电池、硅薄膜太阳能电池等。(2)光伏电板系统的设计和优化:光伏电板系统是由光伏电板、逆变器、电池、控制器等部件组成的,其中控制器对于系统的性能影响至关重要。目前,有关光伏电板系统的控制器研究主要集中在最大功率点追踪、光伏电板的防尘、防水等方面。(3)光伏电板的材料:光伏电板的制造材料对于光伏电板的性能也有很大的影响。随着纳米材料、量子点等新型材料的应用,光伏电板的材料种类越来越多样化,同时也越来越高效。(4)光伏电板系统的应用:光伏电板已经逐渐拓展到建筑、交通等领域,并且在应用领域不断创新,例如应用于建筑外墙、路灯等。
3、尽管许多学者对光伏电板伺服系统的研究已经取得了一系列的成果。但是,目前对于光伏发电伺服系统,很少有论文考虑迟滞、有限时间和输出约束。基于上述讨论,设计了一个有限时间自适应隐逆输出反馈控制器。
技术实现思路
1、为解决现有技术中的不足,本技术提供了如下方案:
2、光伏电板伺服系统的有限时间命令滤波控制方法,包括以下步骤:
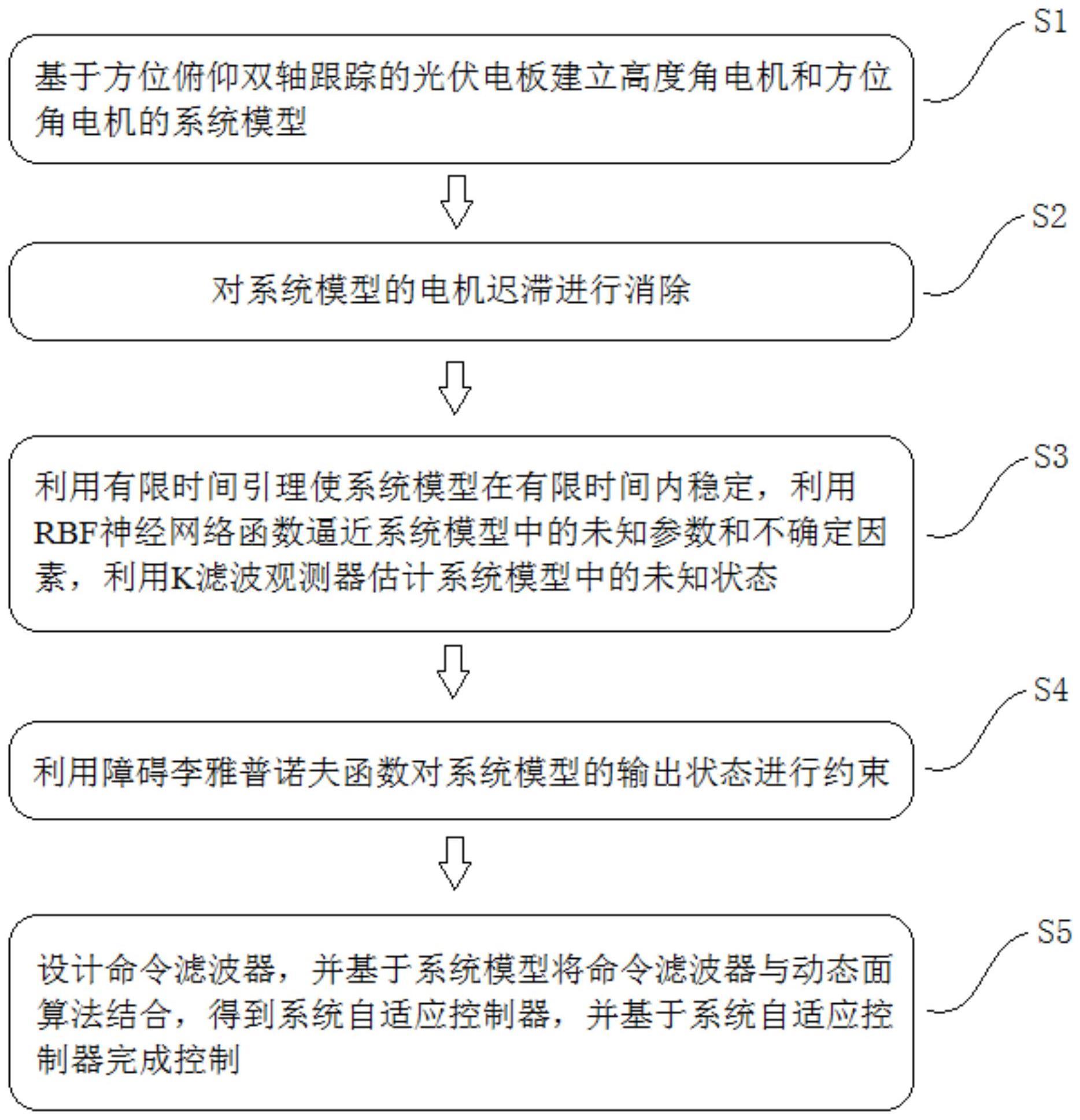
3、s1.基于方位俯仰双轴跟踪的光伏电板建立高度角电机和方位角电机的系统模型;
4、s2.对所述系统模型的电机迟滞进行消除;
5、s3.利用有限时间引理使所述系统模型在有限时间内稳定,利用rbf神经网络函数逼近所述系统模型中的未知参数和不确定因素,利用k滤波观测器估计所述系统模型中的未知状态;
6、s4.利用障碍李雅普诺夫函数对所述系统模型的输出状态进行约束;
7、s5.设计命令滤波器,并基于所述系统模型将所述命令滤波器与动态面算法结合,得到系统自适应控制器,并基于所述系统自适应控制器完成控制。
8、优选的,所述系统模型为:
9、
10、
11、
12、其中,i=1,2分别为高度角控制子系统和方位角控制子系统,θir为转子速度,vir为定子电压,iiq为电子电流,ωir为转子角速度,ji为转子惯量,til为负载转矩,fi为黏滞摩擦系数,kt为转矩常数,α1为额定磁化激励下模型中的反电动势有效系数,a1,a2为常数,ii是总电流,βi是等效初级电感的倒数。
13、优选的,所述s2中,使用pi迟滞模型对所述系统模型的电机迟滞进行消除,所述pi迟滞模型为:
14、
15、其中,p(r)为未知的连续密度函数,r为阈值,满足p(r)>0且为stop算子,d是阈值的上界。
16、优选的,所述s3中,首先得到所述系统模型的状态方程:
17、
18、
19、
20、yi=xi1
21、其中,i=1,2分别为高度角控制子系统和方位角控制子系统,gi为系统的未知参数,θi为转子角度,δi(xi1,t)为系统的不确定因素,yi为系统的输出,wi∈r为由pi迟滞模型表示的控制器的输出,a1,a2为常数,ui为控制信号,xi1为表示转子角度的状态变量,xi2为表示转子角速度得到状态变量,xi3为定子电流的状态变量,β是等效初级电感的倒数;
22、再利用所述有限时间引理使所述系统模型在有限时间内稳定。
23、优选的,所述s3中,利用所述rbf神经网络函数逼近所述系统模型中的未知参数和不确定因素,所述rbf神经网络函数为:
24、
25、其中,对于给定的正整数q≥1,ξi∈ωξi∈rq为输入向量,εi(ξi)为网络重构误差,满足|εi(ξj)|≤εim且εim为未知常数,对于足够大的n为理想权值,n为神经网络节点数,ψi(ξi)=[ρ1(ξi),...,ρn(ξi)]∈rn为权值向量,ρj(ξi)为高斯基函数。
26、优选的,所述s3中,所述未知状态的估计方法包括:当所述状态方程符合估计条件时,使用所述k滤波观测器对所述未知状态进行估计;
27、所述估计条件为:
28、
29、
30、其中,q1,q2,...,qn为正设计参数,为已知光滑函数,θ*和b为未知常数向量,b为外部扰动,x为状态变量,y为系统输出,
31、所述k滤波观测器为:
32、
33、其中,k为大于1的正设计参数,ξ0,ν0,ξ为状态观测器的向量,是对常数bλ的估计,是对转子速度的估计。
34、优选的,所述s4中的所述障碍李雅普诺夫函数为:
35、
36、其中,σ为正设计参数,且满足|η|≤r,r为正常数。
37、优选的,所述s5中的命令滤波器为:
38、
39、
40、其中,l1,μnl2为命令滤波输出,ι1为输入,且l1(0)=ι1(0),l2(0)=0,p,μn为常数。
41、优选的,所述s5中得到系统自适应控制器的方法包括:
42、将所述系统模型转换为适合所述k滤波观测器的形式;
43、设计三个动态面,并结合所述命令滤波器得到所述系统自适应控制器。
44、本技术还提供了光伏电板伺服系统的有限时间命令滤波控制系统,包括:模型构建模块、消除模块、处理模块、约束模块和控制模块;
45、所述模型构建模块用于基于方位俯仰双轴跟踪的光伏电板建立高度角电机和方位角电机的系统模型;
46、所述消除模块用于对所述系统模型的电机迟滞进行消除;
47、所述处理模块利用有限时间引理使所述系统模型在有限时间内稳定,利用rbf神经网络函数逼近所述系统模型中的未知参数和不确定因素,利用k滤波观测器估计所述系统模型中的未知状态;
48、所述约束模块利用障碍李雅普诺夫函数对所述系统模型的输出状态进行约束;
49、所述控制模块用于设计命令滤波器,并基于所述系统模型将所述命令滤波器与动态面算法结合,得到系统自适应控制器,并基于所述系统自适应控制器完成控制。
50、与现有技术相比,本技术的有益效果为:
51、本技术通过引入命令滤波,克服了反演控制方法中的“微分爆炸”问题的同时,消除了滤波误差,使得控制律比较简单;考虑了伺服电机中的迟滞问题,提高了系统控制精度与稳定性;采用rbf神经网络逼近系统模型中存在的参数未知和不确定的函数,并通过对rbf神经网络加权向量范数进行估计,使得计算负担大大减轻;采用有限时间方法,保证了闭环系统所有信号在有限时间内半全局一致最终有界;通过引入障碍李雅普诺夫函数,对系统输出状态予以约束,保证系统状态约束性能和姿态跟踪精度。
- 还没有人留言评论。精彩留言会获得点赞!