一种基于改进遗传算法的自适应机床运动控制方法与流程
本发明属于机床运动控制,具体涉及一种基于改进遗传算法的自适应机床运动控制方法。
背景技术:
1、数控机床具有加工精度高、生产效率高级工人劳动强度低等许多优点,广泛应用于汽车、医疗、航天及海洋等许多领域。随着产品精度的要求越来越高,人们对数控机床加工精度也提出了更高的要求。目前典型的pid控制已经不能很好地满足机床的控制要求,机床x-y运动平台在加工过程中,由于x轴和y轴由两台电机驱动,若两轴中有一轴存在较大的误差,就会导致整个加工误差增大。
2、因此,亟需提出一种基于改进遗传算法的自适应机床运动控制方法,利用遗传算法的特殊寻优特性,来对pid控制的参数进行调整,从而提高机床加工轨迹跟踪精度,保障控制系统的稳定性。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种基于改进遗传算法的自适应机床运动控制方法,通过改进遗传算法调节器实时调节pid控制器参数,提高了机床的控制的精确性和鲁棒性。
2、本发明的目的可以通过以下技术方案实现:
3、一种基于改进遗传算法的自适应机床运动控制方法,包括以下步骤:
4、s1、对机床平台进行数学建模,获取机床运动平台的数学模型;
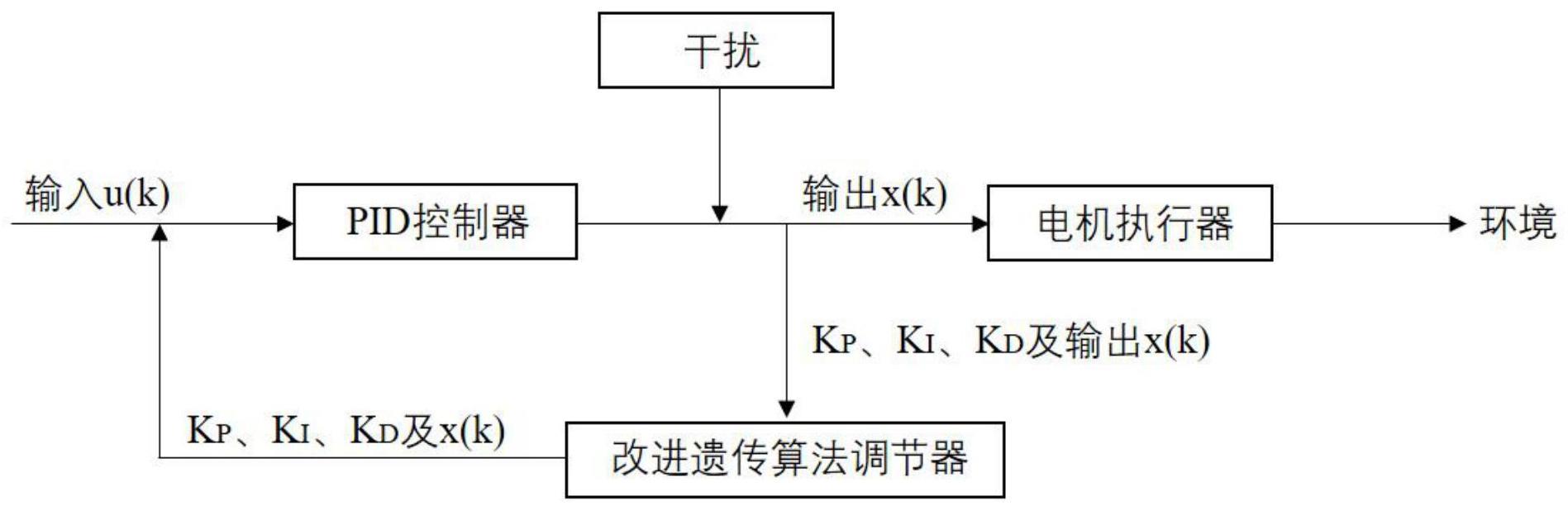
5、s2、构建基于改进遗传算法的pid机床控制策略:
6、将u(k)输入pid控制器,pid控制器调节控制信号输出x(k)至电机执行器,电机执行器依据输出x(k)完成指令动作;
7、同时pid控制器将输出x(k)以及当前pid控制器参数发送至改进遗传算法调节器,进而将输出x(k)以及调节后的pid控制器参数反馈至pid控制器。
8、进一步地,所述步骤s1中,获取机床运动平台的数学模型,具体包括以下步骤:
9、根据x-y轴驱动的永磁同步直线电动机构建d轴和q轴坐标轴,建立运动平台电压和磁链方程式;
10、根据电机原理方程式计算电磁推力;
11、设定系统状态变量,建立系统状态方程式;
12、采用二阶微分方程建立机床运动平台的数学模型。
13、进一步地,所述运动平台电压和磁链方程式为:
14、
15、式中,ud、uq分别为d轴和q轴的电压;ψf为永磁体的励磁磁链;ψd、ψq分别为d轴和q轴磁链;rs为动子相电阻;ld、lq分别为d轴和q轴电感;id、iq分别为d轴和q轴电流;ωr为转子角速度。
16、进一步地,所述电机原理方程式为:
17、
18、所述电磁推力f’e为:
19、
20、式中,f’e为电磁推力;τ为永磁体极距;f为控制系统扰动力;m为电机负载质量;v为电机速度。
21、进一步地,所述系统状态方程式为:
22、
23、式中,u为控制系统输入信号;x(t)和v(t)分别为系统输出位置和电机运动速度。
24、进一步地,所述机床运动平台的数学模型为:
25、
26、式中,下标为1的参数表示x轴的参数,下标为2的参数表示y轴的参数;u1、u2分别为电流控制输入;kf1、kf2为推力系数;m1、m2为负载质量;f1、f2为外部扰动力。
27、进一步地,所述步骤s2中,pid控制器参数包括比例系数kp、积分系数ki和微分系数kd。
28、进一步地,所述步骤s2中,改进遗传算法调节器,包括执行以下步骤:
29、s21、初始化随机种群,由适应度函数选择最优和最差染色体,从i=0开始循环;
30、s22、对种群中的全部染色体执行细菌共轭算子;
31、s23、依据算法的终止条件进行有限次数遗传循环;
32、s24、输出最佳染色体kp、ki和kd。
33、本发明的有益效果为:
34、(1)通过采用细菌共轭的思想,首先对常规的遗传算法流程进行了改进,并结合机床普通的pid控制,提出了结合改进遗传算法的自适应pid控制策略;在原有机床控制方案的硬件以及原有的电机霍尔传感器的基础上,实现了机床的精确控制和鲁棒性。
35、(2)本发明的自适应pid控制采用了改进的遗传算法来实时反馈调节pid控制器参数,将pid控制器参数kp、ki和kd看作是遗传算法中的染色体,由初始化种群然后随机选取参数,通过细菌共轭算子有遗传循环,直至满足算法终止条件,得到最佳的kp、ki和kd值,提升了对外界干扰的鲁棒性。
技术特征:
1.一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述步骤s1中,获取机床运动平台的数学模型,具体包括以下步骤:
3.根据权利要求2所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述运动平台电压和磁链方程式为:
4.根据权利要求3所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述电机原理方程式为:
5.根据权利要求4所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述系统状态方程式为:
6.根据权利要求5所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述机床运动平台的数学模型为:
7.根据权利要求1所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述步骤s2中,pid控制器参数包括比例系数kp、积分系数ki和微分系数kd。
8.根据权利要求1所述的一种基于改进遗传算法的自适应机床运动控制方法,其特征在于:所述步骤s2中,改进遗传算法调节器,包括执行以下步骤:
技术总结
本发明涉及一种基于改进遗传算法的自适应机床运动控制方法,属于机床运动控制技术领域,包括以下步骤:S1、对机床平台进行数学建模,获取机床运动平台的数学模型;S2、构建基于改进遗传算法的PID机床控制策略:将u(k)输入PID控制器,PID控制器调节控制信号输出x(k)至电机执行器,电机执行器依据输出x(k)完成指令动作;同时PID控制器将输出x(k)以及当前PID控制器参数发送至改进遗传算法调节器,进而将输出x(k)以及调节后的PID控制器参数反馈至PID控制器。本发明通过改进遗传算法调节器实时调节PID控制器参数,提高了机床的控制的精确性和鲁棒性。
技术研发人员:赵乐乐,叶燕燕,王尧欣,钟文键,李艳洲
受保护的技术使用者:泰州市东正交通器材有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!