控制无人机起降的方法、装置及系统与流程
本发明涉及车辆领域,尤其涉及一种控制无人机起降的方法、装置及系统。
背景技术:
1、现阶段的无人机通常需要由飞手通过手柄操控其起降(即起飞或降落)。
2、在无人机的起降过程中,其飞行路径上可能存在某些障碍物(如电线、树枝、鸟类等),而无人机的飞手可能由于距离、视角等受限而无法及时、直观的感知到上述障碍物,此时若强行操作无人机起降,无人机可能会接触到上述障碍物导致安全事故,如桨叶打到电线造成无人机跌落等。
技术实现思路
1、有鉴于此,本发明提供一种控制无人机起降的方法、装置及系统,以解决相关技术中的不足。
2、具体地,本发明是通过如下技术方案实现:
3、根据本发明的第一方面,提供了一种控制无人机起降的方法,所述方法应用于车辆,所述车辆控制的无人机起飞或降落的飞行策略包括飞行路径,所述方法包括:
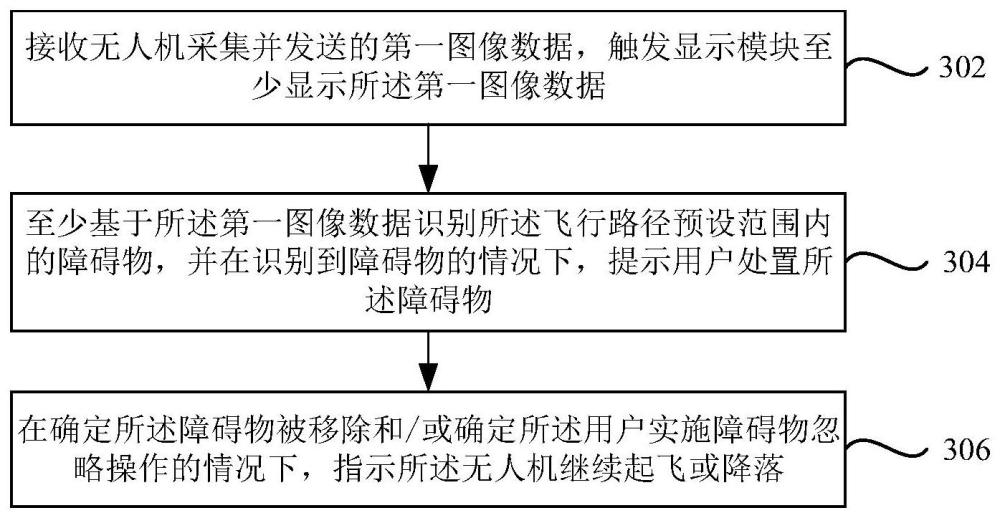
4、接收无人机采集并发送的第一图像数据,触发显示模块至少显示所述第一图像数据;
5、至少基于所述第一图像数据识别所述飞行路径预设范围内的障碍物,并在识别到障碍物的情况下,提示用户处置所述障碍物;
6、在确定所述障碍物被移除和/或确定所述用户实施障碍物忽略操作的情况下,指示所述无人机继续起飞或降落。
7、可选的,所述方法还包括:采集第二图像数据;
8、所述触发显示模块至少显示所述第一图像数据,包括:
9、触发显示模块分别显示所述第一图像数据和所述第二图像数据;或者,
10、触发显示模块显示对所述第一图像数据和所述第二图像数据进行融合处理得到的融合后图像数据。
11、可选的,所述至少基于所述第一图像数据识别所述飞行路径预设范围内的障碍物,包括:
12、分别基于所述第一图像数据和所述第二图像数据识别障碍物;或者,
13、基于所述融合后图像数据识别障碍物。
14、可选的,还包括:
15、针对所述显示模块中显示的任一图像数据,若基于所述任一图像数据识别到任一障碍物,则在所述任一图像数据中的相应位置突出显示所述任一障碍物。
16、可选的,
17、所述方法还包括:在所述无人机起飞前向所述无人机发送起飞指令,以触发所述无人机开始起飞,或者在所述无人机降落前向所述无人机发送降落指令,以触发所述无人机开始降落;
18、所述第一图像数据由所述无人机响应于所述起飞指令或所述降落指令采集得到;或者,由所述无人机在起飞或降落过程中采集得到。
19、可选的,所述第一图像数据由所述无人机在起飞或降落过程中采集得到,所述方法还包括:
20、在识别到障碍物的情况下,指示所述无人机悬停或减速。
21、可选的,还包括:
22、响应于所述用户实施的暂停起降操作,指示所述无人机暂停起飞或降落;和/或
23、响应于所述用户实施的恢复起降操作,指示所述无人机重新开始起飞或降落。
24、可选的,所述触发显示模块至少显示所述第一图像数据,包括:
25、控制自身装配的显示模块至少显示所述第一图像数据;或者,
26、将所述第一图像数据发送至所述用户使用的终端设备,以触发所述终端设备装配的显示模块至少显示所述第一图像数据。
27、可选的,还包括:
28、采集所述无人机所处空间的环境参数;
29、根据所述环境参数制定所述飞行策略并将其发送至所述无人机;或者,
30、根据所述环境参数更新所述飞行策略并将更新后飞行策略发送至所述无人机。
31、可选的,还包括:
32、采集所述无人机所处空间的环境参数,并根据所述环境参数判断当前环境是否满足所述无人机的飞行条件;
33、在当前环境不满足所述飞行条件的情况下,提示所述用户处置所述无人机;
34、在当前环境满足所述飞行条件和/或确定所述用户实施条件忽略操作的情况下,指示所述无人机继续起飞或降落。
35、可选的,还包括:响应于用户实施的策略变更操作确定新的飞行策略,并将所述新的飞行策略发送至所述无人机;
36、所述指示所述无人机继续起飞或降落,包括:指示所述无人机按照所述新的飞行策略继续起飞或降落。
37、可选的,还包括:
38、在未识别到障碍物的情况下,指示所述无人机按照所述飞行策略继续起飞或降落。
39、根据本发明的第二方面,提供了一种无人机控制系统,包括车辆及其控制的无人机,所述无人机起飞或降落的飞行策略包括飞行路径,其中:
40、所述无人机,用于采集第一图像数据并将其发送至所述车辆;
41、所述车辆,用于触发显示模块至少显示所述第一图像数据;以及,至少基于所述第一图像数据识别所述飞行路径预设范围内的障碍物,并在识别到障碍物的情况下,提示用户处置所述障碍物;在确定所述障碍物被移除和/或确定所述用户实施障碍物忽略操作的情况下,指示所述无人机继续起飞或降落。
42、根据本发明的第三方面,提供了一种控制无人机起降的装置,所述装置应用于车辆,所述车辆控制的无人机起飞或降落的飞行策略包括飞行路径,所述装置包括:
43、接收与触发单元,用于接收无人机采集并发送的第一图像数据,触发显示模块至少显示所述第一图像数据;
44、识别与提示单元,用于至少基于所述第一图像数据识别所述飞行路径预设范围内的障碍物,并在识别到障碍物的情况下,提示用户处置所述障碍物;
45、起降指示单元,用于在确定所述障碍物被移除和/或确定所述用户实施障碍物忽略操作的情况下,指示所述无人机继续起飞或降落。
46、根据本发明的第四方面,提供了一种车辆,所述车辆用于执行如第一方面中任一项所述方法的步骤以控制无人机起飞或降落。
47、可选的,所述车辆为皮卡车,
48、所述无人机从所述皮卡车的后斗内或后斗的上盖表面起飞;和/或,
49、所述无人机降落在所述皮卡车的后斗内或后斗的上盖表面。
50、根据本发明的第五方面,提供了一种电子设备,包括:
51、处理器;用于存储处理器可执行指令的存储器;
52、其中,所述处理器通过运行所述可执行指令以实现第一方面所述方法的步骤。
53、根据本发明的第六方面,提供了一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现第一方面所述方法的步骤。
54、本发明的实施例提供的技术方案具有以下有益效果:
55、通过前述起降控制方案,由无人机自动采集第一图像数据并发送至车辆,相应的,车辆一方面触发显示模块至少显示该图像数据,另一方面至少基于该数据识别障碍物(即判断飞行路径的预设范围内是否存在障碍物),并在识别到障碍物的情况下提示用户处置该障碍物(以消除障碍)。进而,在确定障碍物被移出或用户选择忽略该障碍物的情况下,再指示所述无人机继续起飞或降落,以完成起降过程。
56、可见,本方案通过显示模块至少显示无人机采集的第一图像数据,使得用户可以查看该图像数据从而及时、准确地感知无人机的起降环境。而在自动识别到存在障碍物的情况下提示用户处置该障碍物,降低了用户对障碍物的感知难度,有助于用户在有障碍物存在时及时介入进行处理,从而有效提升无人机起降过程中的安全性。另外,本方案实现了车辆与无人机的深度绑定,由车辆控制无人机自动起降,不仅不需要专业飞手手动操控无人机起降,而且用户无需下车即可在车辆上完成观察和障碍物处置,甚至可以在车辆行驶过程中自动放飞和回收无人机,进一步提升了用户对无人机的使用便利性。
- 还没有人留言评论。精彩留言会获得点赞!