一种主动悬架硬件在环模拟系统及方法与流程
本发明属于汽车,具体涉及一种主动悬架硬件在环模拟系统及方法。
背景技术:
1、现有乘用车悬架整车道路模拟耐久性试验主要采用24通道轴耦合道路模拟机,根据实车道路试验采集的载荷谱,应用道路模拟试验技术,在试验室内复现试车场道路试验场景,进而对被动悬架进行快速、全面的长周期耐久性测试,如麦弗逊式悬架、双叉臂式悬架、多连杆式悬架等。
2、现有技术存在以下不足:24通道轴耦合道路模拟机试验能力不足,无法覆盖主动悬架测试。根本原因在于,主动悬架存在电控系统(ecas)用于控制悬架主动运动,其在试验室内耐久性测试试验,不仅需要模拟试车场道路载荷的力和位移驱动,还需要同步模拟实车悬架控制器(ecas)驱动信号,控制弹簧刚度、减震器阻尼力和实车高度,进而提升车辆操控性和舒适性。
技术实现思路
1、针对现有技术中存在的24通道轴耦合道路模拟机试验能力不足,无法覆盖主动悬架测试等问题,本发明提供了一种主动悬架硬件在环(hil)模拟系统及方法,采用悬架hil模拟系统和24通道轴耦合道路模拟机联合仿真模式,复现主动悬架道路试验场景,支撑主动悬架整车耐久性测试,尽可能复现了实车路试状态,保证测试科学性,进而保证产品质量。
2、本发明通过如下技术方案实现:
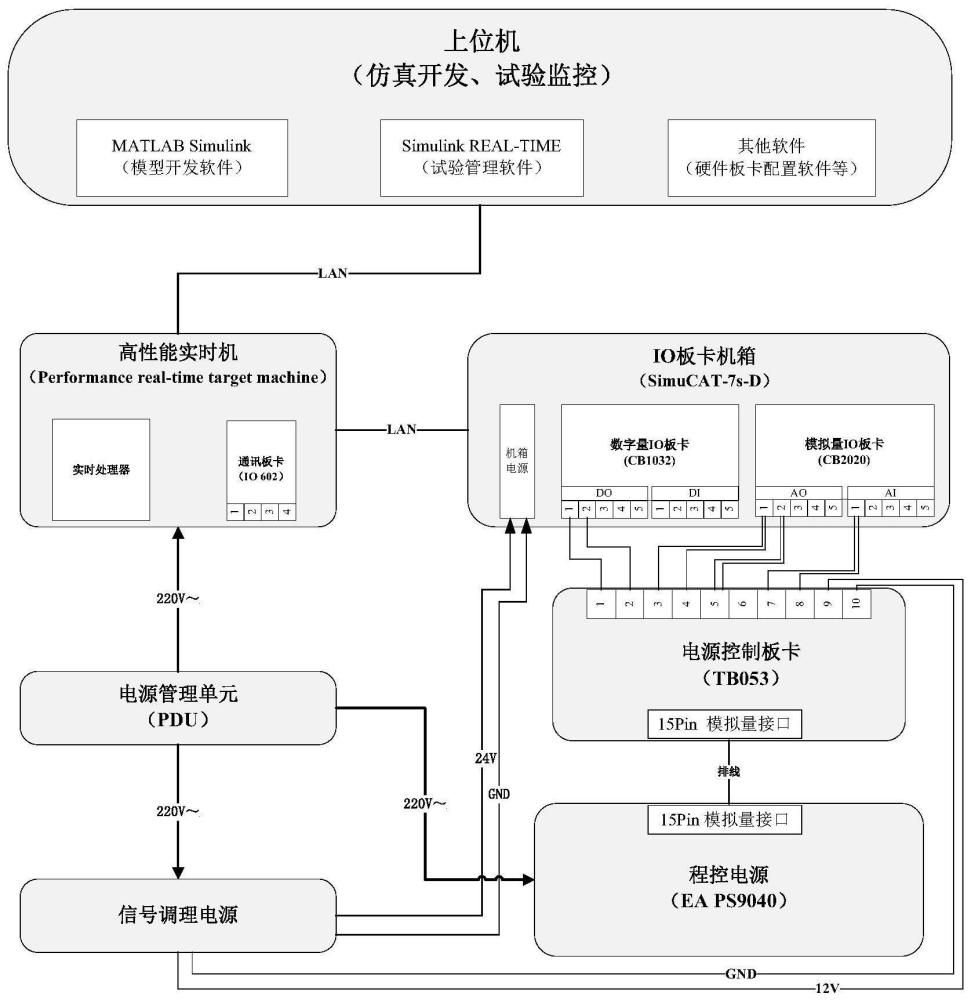
3、一种主动悬架硬件在环模拟系统,包括:
4、上位机,与高性能实时机连接,用于安装模型开发软件、试验管理软件以及其他辅助软件;
5、高性能实时机,与io板卡机箱连接,用于运行仿真模型以及信号处理;
6、io板卡机箱,用于放置io板卡;
7、电源控制板卡,用于控制测试系统中的程控电源;
8、程控电源,用于模拟车载蓄电池,为待测车辆供电;
9、电源管理单元,与高性能实时机、程控电源、信号调理电源连接;
10、信号调理电源,用于输出±24v、±12v、5v电源,分别与io板卡机箱及电源控制板卡连接。
11、进一步地,所述高性能实时机内置有can通讯板卡,can通讯板卡的第1个通道与待测车辆obd口通过can总线相连,can通讯板卡的第2个通道与24通道轴耦合道路模拟机通过can总线相连。
12、进一步地,所述io板卡选用cb1032数字量io板卡,包括32路数字通道,通过acecat软件进行通道配置;cb1032板卡第1个数字量输出通道与电源控制板卡接口1脚连接,第2个数字量输出通道与电源控制板卡接口2脚连接,用于控制程控电源的使能;cb1032板卡含有16路模拟输入,20路模拟输出通道,通过visual studio 2015软件进行通道配置;cb2020板卡第1个模拟量输出通道分别与电源控制板卡接口3脚和4脚连接,用于控制程控电源输出电压,第2个模拟量输出通道分别与电源控制板卡接口5脚和6脚连接,用于控制程控电源输出电流最大值;cb2020板卡第1个模拟量输入通道分别与电源控制板卡接口7脚和8脚连接,用于采集程控电源实际输出电流值。
13、进一步地,所述电源控制板卡可控制程控电源的输出电压、电流限值、关断,将程控电源输出的用于表征电流大小的电压送给cb2020板卡采集;程控电源通过标准15pin的排线进行连接,进而实现程控电源远程控制。
14、进一步地,所述电源管理单元用于提供220v交流供电输入,电源管理单元的输入端与试验室电源连接。
15、进一步地,所述信号调理电源的24v输出端与io板卡机箱连接,12v输出端与电源控制板卡接插件第9脚和第10脚相连,为板卡提供电源输入。
16、另一方面,本发明提供了一种主动悬架硬件在环模拟系统的试验方法,具体包括如下步骤:
17、s1:搭建电源模型;
18、s2:接收mts设备发送的试车场道路测试试验车辆控制器记录的报文信息;
19、s3:对接收到的mts设备报文信息后进行转发给实车,以及手动编辑报文信号发送给实车,用于控制实车进行悬架相应的主动运动。
20、进一步地,步骤s1具体过程如下:
21、程控电源的使能信号eaenable常量模块通过取反模块再接入数字量输出板卡的第1通道模型驱动端口do_ch1;
22、程控电源的电压控制常量模块ea_pwrsupuctrl和ea_pwrsupuctrl1依次经过选择模块、限值模块,再经过比例模块,最后进入模拟量板卡的第1输出通道模型驱动端口dac_ch1[v],当eaenable=1时,程控电源输出12v,eaenable=0时,程控电源输出0v;
23、程控电源的电流限值控制常量模块ea_currentlimit[a]经过限值模块、比例模块,再进入模拟量板卡的第2输出通道模型驱动端口dac_ch2[v];
24、通过模拟量板卡的第1输入通道模型驱动端口adc_ch1[v]连接至显示模块,读取程控电源实际电流值。
25、进一步地,步骤s2具体过程如下:
26、s21:在matlab中安装speedgoat驱动库,在simulink模型中找到simulink real-time工具箱,即可找到can报文设置模块can setup、can报文发送模块can write、can报文接收模块can read、can报文打包模块can pack、can报文解包模块can unpack;
27、s22:通过报文设置模块can setup,设置can波特率,保证speedgoat端口的can波特率与mts设备波特率保持一致,speedgoat的can端口在接收到报文后将报文储存在接收通道的buffer中,当simulink模型到达运行的周期点时,can read模块读取buffer中的报文;
28、s23:将can read模块和can unpack模块放在do-while子系统中,使得can read模块在一个周期内循环读取buffer中的报文,直到把所有的报文都读取上来为止;
29、s24:1个can read可对应多个can unpack模块,can unpack模块对应一个控制器网络节点,在每个can unpack中导入dbc文件,通过dbc文件选择要读取的报文。
30、进一步地,步骤s3具体过程如下:
31、首先将从mts设备读取到的信号,通过分线器进入can打包模块,然后进入can发送模块,通过io602板卡的第2个can通道发送给实车,其中can pack模块中导入车型dbc文件,基于dbc文件进行打包传输,最后通过can发送模块给实车,进而实现车辆驱动控制。
32、与现有技术相比,本发明的优点如下:
33、本发明的一种主动悬架硬件在环(hil)模拟系统及方法,采用悬架hil模拟系统和24通道轴耦合道路模拟机联合仿真模式,复现主动悬架道路试验场景,支撑主动悬架整车耐久性测试,尽可能复现了实车路试状态,保证测试科学性,进而保证产品质量。
- 还没有人留言评论。精彩留言会获得点赞!