一种基于无人机的红外巡检系统及其方法与流程
本发明涉及无人机红外巡检,尤其涉及一种基于无人机的红外巡检系统及其方法。
背景技术:
1、电力行业需要定期检查设施和基础设施,以确保安全和性能。传统的巡检方法通常昂贵、耗时且不够高效。无人机红外巡检技术应运而生,红外成像技术的进步使其更加便携、高分辨率,并具有更广泛的应用,无人机红外巡检技术能够自动检测和分析问题,提高效率并可以减少人工巡检的风险。
2、现有的基于无人机的红外巡检系统及其方法通过以下技术实现,包括:红外成像技术:无人机搭载红外相机或热成像摄像机,用于捕捉目标物体的红外辐射。这些相机可以检测物体的温度差异,从而揭示问题或异常。自动飞行控制系统:无人机需要先进的自动飞行控制系统,以实现自主的飞行和任务执行。这些系统通常包括gps导航、姿态控制、避障技术等。数据处理和分析:收集到的红外图像需要进行数据处理和分析,以识别潜在问题。机器学习和计算机视觉技术在此方面发挥关键作用。通信和遥控:无人机需要可靠的通信系统,以便与操作员或地面站进行数据传输和遥控。无人机红外巡检技术在提高安全性、降低成本、提高效率等方面具有巨大潜力,随着技术的不断进步和应用领域的扩展,它将继续在各个行业中发挥重要作用。
3、例如公开号为:cn114372922a的发明专利公开了一种夜间环境下基于无人机巡检的绝缘子红外缺陷诊断方法,包括:使用无人机对被巡检电气设备进行三维定点,根据定点来进行航点飞行获取图像,对图像基于ai技术采用红外温度的方法对绝缘子进行自动化缺陷识别。
4、例如公开号为:cn116297680a的发明专利公开了一种基于无人机电力巡检红外缺陷判定方法,包括:s1.利用无人机搭载红外相机,按照巡检路线进行红外照片拍摄,同时记录红外照片对应的拍摄信息,传输给处理器;s2.处理器以该红外照片对应的杆塔编号和点位编号对红外照片进行命名,进行分类后保存至无人机存储卡,并保存每一张红外照片的拍摄信息和存储地址;s3.在无人机巡检完成后,将无人机存储卡中保存的信息上传到后台服务器;s4.后台服务器根据上传信息,对每一张红外照片进行缺陷判定。
5、但本技术发明人在实现本技术实施例中发明技术方案的步骤中,发现上述技术至少存在如下技术问题:
6、现有技术中,无人机红外巡检系统及其方法面临复杂性和多样性的挑战,使得其正确率变的极易不稳定从而降低,存在不能有效的评估并调节红外巡检算法稳定性以提高基于无人机的红外巡检系统及其方法正确率的问题。
技术实现思路
1、本技术实施例通过提供一种基于无人机的红外巡检系统及其方法,解决了现有技术中,存在不能有效的评估并调节红外巡检算法稳定性以提高基于无人机的红外巡检系统及其方法正确率的问题,实现了提高红外巡检算法生成巡检方案的正确性。
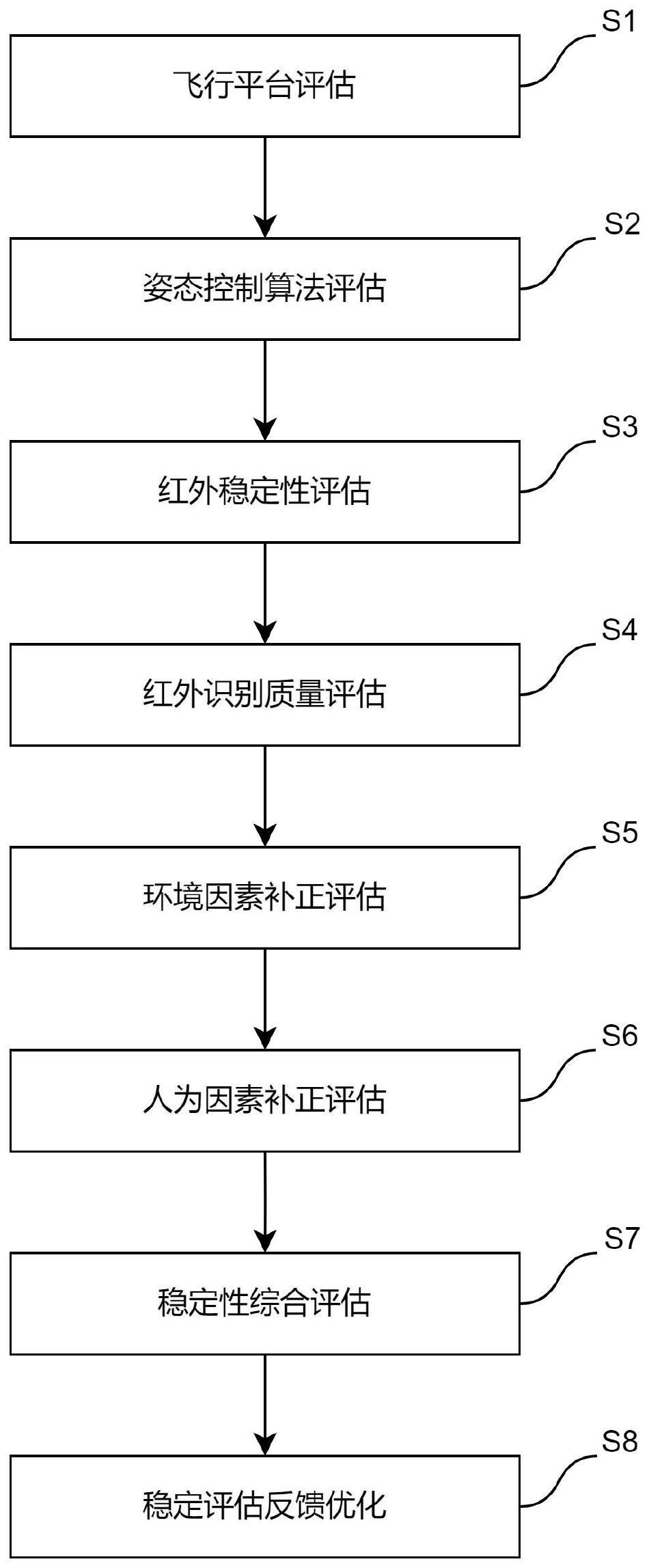
2、本技术实施例提供了一种基于无人机的红外巡检方法,用于服务器,包括以下步骤:s1,评估无人机飞行平台对红外检测算法的影响,得到飞行平台评估系数;s2,评估无人机姿态控制算法对红外检测算法的影响,得到姿态控制算法评估系数;s3,评估无人机红外传感器稳定性对红外检测算法的影响,得到红外稳定性评估系数;s4,评估无人机红外传感器识别质量对红外检测算法的影响,得到红外识别质量评估系数;s5,评估环境因素对红外检测算法的影响,得到环境因素补正评估系数;s6,评估人为因素对红外检测算法的影响,得到人为因素补正评估系数;s7,根据飞行平台评估系数、姿态控制算法评估系数、红外稳定性评估系数、红外识别质量评估系数、环境因素补正评估系数和人为因素补正评估系数对红外检测算法的影响进行综合评估,得到稳定性综合评估系数;s8,根据稳定性综合评估系数对红外检测算法进行对应的调节。
3、进一步的,所述得到飞行平台评估系数的具体步骤为:获取无人机飞行平台的数据,合并记为无人机飞行平台原始数据组,无人机飞行平台原始数据组数据类别记为a0,a0=1,2,...,a,a为无人机飞行平台原始数据组数据类别总数,无人机飞行平台原始数据组数据第a0类的数据记为b0,b0=1,2,...,b,b为无人机飞行平台原始数据组第a0类数据数量总数,则第a0类第b0个无人机飞行平台原始数据组数据记为并据此通过计算飞行平台评估系数公式得到第a0类第c0个无人机飞行平台原始数据组的飞行平台评估系数具体计算公式为其中表示第a0类第b0个无人机飞行平台原始数据组中飞行稳定性评估值,表示第a0类第b0个无人机飞行平台原始数据组中高度控制评估值,表示第a0类第b0个无人机飞行平台原始数据组中传感器性能评估值,和分别表示第a0类第b0个无人机飞行平台原始数据组数据设定飞行稳定性标准值、设定高度控制标准值和设定传感器性能标准值,β表示无人机飞行平台原始数据组数据噪音影响读取误差因子,c表示第a0类第b0个预定义无人机飞行平台飞行轨迹规划算法影响修正值,同样的步骤计算所有无人机飞行平台原始数据组的数据,经过学习算法再次融合计算后得到飞行平台评估系数α。
4、进一步的,所述得到姿态控制算法评估系数的具体步骤为:获取无人机姿态控制算法的数据,合并记为无人机姿态控制算法原始数据组,由无人机姿态控制算法原始数据组获取姿态控制算法平滑性匹配评估值b、姿态调整速度评估值c、航线规划适配性评估值d和预定义数据同步匹配系数e,并据此通过计算姿态控制算法评估系数公式得到姿态控制算法评估系数χ,具体计算公式为其中φ表示姿态控制算法平滑性匹配评估值与姿态调整速度评估值匹配调和因子,d和f分别表示姿态控制算法平滑性匹配评估值和姿态调整速度评估值对应的稳定性权重因子,c预表示预定义姿态调整速度评估标准值,d预表示预定义航线规划适配性评估标准值,表示预定义航线规划适配性评估值对姿态控制算法的匹配调和因子,δ表示预定义红外传感器型号对数据同步匹配系数的匹配调和因子,ε表示姿态控制算法平滑性匹配评估值和姿态调整速度评估值相互叠加负向影响系数,φ表示预定义算法类型修正系数,e表示自然常数。
5、进一步的,所述得到红外稳定性评估系数的具体步骤为:获取无人机红外传感器稳定性的数据,合并记为红外稳定性原始数据组,由红外稳定性原始数据组获取机械振动影响匹配评估值f、传感器供电稳定性匹配评估值g、安装牢固性匹配评估值h、安装位置适配性匹配影响系数i,并据此通过计算红外稳定性评估系数公式得到红外稳定性评估系数γ,具体计算公式为其中g预表示传感器供电稳定性匹配评估标准值,g和h分别表示机械振动影响匹配评估值和传感器供电稳定性匹配评估值与传感器供电稳定性匹配评估标准值比值对应的影响匹配因子,i和j分别表示机械振动影响匹配评估值和传感器供电稳定性匹配评估值对应的稳定性权重因子,n表示安装牢固性匹配评估值对机械振动影响匹配评估值和传感器供电稳定性匹配评估值的对应的影响叠加因子,k表示安装位置适配性匹配影响系数对红外稳定性评估的影响叠加因子,j表示红外传感器类型对红外稳定性评估的影响匹配因子。
6、进一步的,所述得到红外识别质量评估系数的具体步骤为:获取无人机红外识别质量的数据,合并记为红外识别质量原始数据组,由红外识别质量原始数据组获取红外图像分辨率k、红外识别灵敏度l、红外识别动态范围m和红外信噪比匹配系数n,并据此通过计算红外识别质量评估值公式得到红外识别质量评估值m,具体计算公式为其中k标、l标与m标分别表示红外图像分辨率标准值、红外识别灵敏度标准值和红外识别动态范围标准值,μ表示红外图像分辨率和红外识别灵敏度与红外识别动态范围的联合匹配因子,η与ι分别表示红外图像分辨率和红外识别灵敏度的影响匹配因子,λ表示红外图像分辨率、红外识别灵敏度和红外识别动态范围的联合叠加负向匹配因子,e表示自然常数,并据此得到红外识别质量评估系数当m≥0,μ=(m×o×n)p,当m<0,其中p表示预定义红外巡检算法训练集影响修正匹配系数,o表示红外巡检算法超参数调整影响系数的影响匹配因子。
7、进一步的,所述得到环境因素补正评估系数的具体步骤为:获取无人机红外巡检外在环境的数据,合并记为环境补正原始数据组,环境补正原始数据组数据类别记为q0,q0=1,2,...,q,q为环境补正原始数据组数据类别总数,由环境补正原始数据组获取大气透明度影响评估值q、第q0类风向风力匹配影响系数地理位置决策支持匹配影响系数s和预定义照明条件影响系数ω,并据此通过计算环境因素补正评估系数公式得到环境因素补正评估系数θ,具体计算公式为其中表示第q0类预定义风向风力匹配影响系数,表示第q0类风向风力匹配影响系数与预定义风向风力匹配影响系数差值标准值,q设表示设定大气透明度影响评估标准值。
8、进一步的,所述得到人为因素补正评估系数的具体步骤为:获取无人机红外巡检人为操作的数据,合并记为人为补正原始数据组,由人为补正原始数据组获取人为飞行控制影响评估值t、人为传感器设置影响评估值u和预定义人为设置算法匹配影响系数v,并据此通过计算人为因素补正评估系数公式得到人为因素补正评估系数σ,具体计算公式为其中s与t分别表示人为飞行控制影响评估值和人为传感器设置影响评估值的影响权重因子,表示人为飞行控制影响评估值t和人为传感器设置影响评估值与预定义人为培训熟练度影响评估值叠加负向影响因子,r表示预定义人为培训熟练度对人为因素补正评估的影响匹配因子,表示预定义人为培训熟练度影响评估值。
9、进一步的,所述得到稳定性综合评估系数的具体步骤为:获取飞行平台评估系数、姿态控制算法评估系数、红外稳定性评估系数、红外识别质量评估系数、环境因素补正评估系数和人为因素补正评估系数,并据此通过计算稳定性综合评估系数公式得到稳定性综合评估系数τ,具体计算公式为其中u、v、w和z分别表示飞行平台评估系数、姿态控制算法评估系数、环境因素补正评估系数和人为因素补正评估系数对应的红外巡检算法的稳定性权重因子。
10、进一步的,所述根据稳定性综合评估系数对红外检测算法进行对应的调节的具体步骤为:将稳定性综合评估系数与预定义稳定性综合评估系数阈值对比,若稳定性综合评估系数在预定义误差允许范围内,则将稳定性综合评估系数对应的红外巡检算法记为有效稳定性综合评估系数红外巡检算法,否则分别将飞行平台评估系数、姿态控制算法评估系数、红外稳定性评估系数、红外识别质量评估系数、环境因素补正评估系数和人为因素补正评估系数与对应的最大预定义系数阈值进行比较计算,若各评估系数超过对应的最大预定义系数阈值,则依次遍历超过阈值的各评估系数对应的数据组中用于无人机红外巡检的各因素数据,当各因素数据超过对应的阈值时,记为不合理因素数据,并对对应的红外巡检算法的具体因素进行重新优化调整;根据已有的红外巡检算法训练集实例作为历史数据集,将红外巡检算法对应的不合理因素数据重新进行训练,训练后调整的算法记为红外识别新算法,对红外识别新算法再次评估得到新的稳定性综合评估系数,并再次评估红外巡检算法稳定性,重复此步骤直到得到有效稳定性综合评估系数红外巡检算法和更新历史数据集。
11、本技术实施例提供了一种基于无人机的红外巡检系统,所述基于无人机的红外巡检系统包括:飞行平台评估模块、姿态控制算法评估模块、红外稳定性评估模块、红外识别质量评估模块、环境因素补正评估模块、人为因素补正评估模块、稳定性综合评估模块和稳定评估反馈优化终端;所述飞行平台评估模块用于评估无人机飞行平台对红外检测算法的影响,得到飞行平台评估系数;所述姿态控制算法评估模块用于评估无人机姿态控制算法对红外检测算法的影响,得到姿态控制算法评估系数;所述红外稳定性评估模块用于评估无人机红外传感器稳定性对红外检测算法的影响,得到红外稳定性评估系数;所述红外识别质量评估模块用于评估无人机红外传感器识别质量对红外检测算法的影响,得到红外识别质量评估系数;所述环境因素补正评估模块用于评估环境因素对红外检测算法的影响,得到环境因素补正评估系数;所述人为因素补正评估模块用于评估人为因素对红外检测算法的影响,得到人为因素补正评估系数;所述稳定性综合评估模块用于根据飞行平台评估系数、姿态控制算法评估系数、红外稳定性评估系数、红外识别质量评估系数、环境因素补正评估系数和人为因素补正评估系数对红外检测算法的影响进行综合评估,得到稳定性综合评估系数;所述稳定评估反馈优化终端用于根据稳定性综合评估系数对红外检测算法进行对应的调节。
12、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
13、1、通过飞行平台评估、姿态控制算法评估、红外稳定性评估、红外识别质量评估、环境因素补正评估、人为因素补正评估得到飞行平台评估系数、姿态控制算法评估系数、红外稳定性评估系数、红外识别质量评估系数、环境因素补正评估系数和人为因素补正评估系数,再通过稳定性综合评估得到稳定性综合评估系数,从而通过稳定评估反馈优化根据稳定性综合评估系数对红外巡检算法进行对应的调节,有效提高了红外巡检算法的稳定性,有效解决了现有技术中,存在不能有效的评估并调节红外巡检算法稳定性以提高基于无人机的红外巡检方法正确率的问题。
14、2、通过稳定性综合评估综合计算各评估系数,得到飞行平台评估系数、姿态控制算法评估系数、红外稳定性评估系数、红外识别质量评估系数、环境因素补正评估系数和人为因素补正评估系数结果综合计算在一起,从而提高了红外巡检系统得出红外巡检结果的可读性和客观性,进而实现了提高优化红外巡检算法适配无人机的运动的环境适应性。
15、3、通过评估反馈优化终端对红外巡检算法进行对应的调节,将稳定性综合评估系数及其各评估系数依次与对应的预定义阈值比较,找到不合理因素数据重新优化调整,从而评估红外巡检算法在不同条件下的稳定性,对算法进行精细调整,更好地适应特定的红外巡检飞行环境,提高红外巡检系统的抗干扰性,进而实现了有效提高故障检测方法的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!