基于扫频控制与自动衰减逻辑的机载雷达侦察数字系统的制作方法
本发明涉及雷达数字信号处理,具体为基于扫频控制与自动衰减逻辑的机载雷达侦察数字系统。
背景技术:
1、对于现有常见民用机载雷达系统设备,在设计中往往只能进行单阵面侦察作业,这样的设计在实际复杂空域环境中无法兼顾多方位侦察的需求,可能会使侦察效果大打折扣。
2、过去常用的基于单阵面扫频的机载侦察系统的民用雷达,其原理为:在同一方位点,进行单个90度阵面内的扫频控制,这样的操作会存在一个明显的问题,即如果需要对本方位点的其余阵面进行扫频控制,可能需要调转机身方向才能实现,这样的操作在实际应用当中花费时间更久,对外界载机条件要求更高,使用更加频繁,对于此类设备常用的机载侦察场景来说,这些缺点是急需解决的。此外,对于机载雷达侦察设备,一旦设备搭载于无人机并起飞工作后,一般难以再次设置输入参数,如果没有自动衰减的设计,实际侦察工作中会出现侦测到的信号可能不能与起飞前输入的固定衰减值相适配,这样就会导致在实测中接收到的信号过大超过阈值或者过小无法被采集到,使得实际侦察结果不具有实用性和可信度。
技术实现思路
1、本发明的目的在于提供基于扫频控制与自动衰减逻辑的机载雷达侦察数字系统,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
3、基于扫频控制与自动衰减逻辑的机载雷达侦察数字系统,所述基于扫频控制与自动衰减逻辑的机载雷达侦察数字系统由机载雷达探测器和后端控制中心组成,其中后端控制中心包括指令控制模块、解析模块、微波控制模块、自适应衰减模块和输出模块;
4、所述指令控制模块由上位机对机载雷达下达报文指令;所述解析模块对指令报文进行解析,提取所需信息并将信息传输给微波控制模块;所述微波控制模块利用初始数据完成机载雷达在作业中的阵面切换和扫频控制;所述自适应衰减模块对机载雷达在侦察过程中接收的信号进行动态调整;所述输出模块将完成调整后的正确信号进行输出;
5、所述指令控制模块连接于解析模块;所述解析模块连接于微波控制模块;所述微波控制模块连接于自适应衰减模块;所述自适应衰减模块连接于输出模块。
6、民用雷达行业是一个技术密集型、创新驱动型的产业,其具有高附加值、高效益和高社会效益的特点;当前民用雷达产品涉及到电子技术、计算机技术和信号处理技术等领域,在本技术中,以民用雷达作为基础,对整个雷达的扫频和衰减进行进一步分析。
7、所述指令控制模块包括指令生成单元和指令传输单元;所述指令生成单元由上位机设置雷达初始数据并将数据生成为指令报文;所述指令传输单元将生成的指令报文通过spi发送给作业雷达。
8、所述机载雷达的上位机是一种控制和监控雷达系统的设备;通常由计算机和对应软件及算法组成,用于控制雷达的操作模式、参数设置、数据处理和显示功能;上位机能够接收雷达传感器采集的数据并进行实时处理和分析,将分析结果通过用户显示端向操作人员提供数据和图像信息;所述指令传输单元通过无线传输方式与机载雷达进行数据传输。
9、所述解析模块包括报文解析单元、阵面与频点信息提取单元和衰减信息提取单元;所述报文解析单元接收指令报文,对报文进行解析获取上位机对雷达初始设置的信息数据;所述阵面与频点信息提取单元根据与外部报文交互协定的报文内容,按照不同的报文位置放置对应的参数值逻辑,从输入的报文对应位置中提取出所需的本振频率fo、定频率fd、扫频频段[fstart,fend]、扫频带宽b、定阵面角度θ、扫阵面角度区间[θstart,θend]、扫阵面速率θsp信息,将提取的报文信息输入微波控制模块;所述衰减信息提取单元根据与外部报文交互协定的报文内容,按照不同的报文位置放置对应的参数值逻辑,从输入的报文对应位置中提取控制自动衰减功能所需的参数包括原始衰减值a0、原始幅度值a0、衰减自适应变化量δa、功率最大最小限制区间[jmin,jmax]和衰减重置时延t0,将提取的报文信息输入自适应衰减模块。
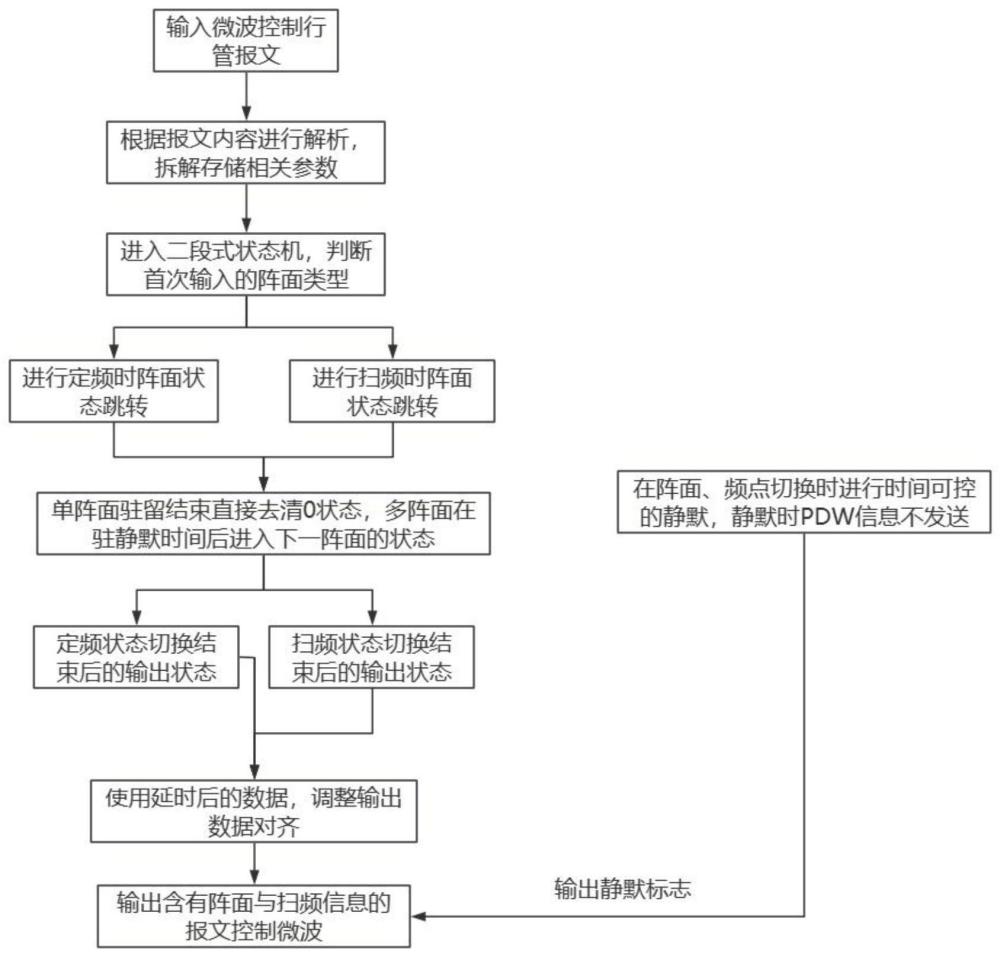
10、所述微波控制模块包括第一状态机、第二状态机和pdw信息接收单元;所述第一状态机作为雷达侦察状态跳转控制设备,用于雷达侦察时的阵面切换和扫频控制;第一状态机接收解析模块传输的报文信息并根据信息判断当前雷达首次输入的频率和阵面类型,将判断结果作为控制报文发送给第二状态机;所述第二状态机接收控制报文并根据报文内容对机载雷达实际作业的状态内容进行控制;所述pdw信息接收单元用于接收由探测目标反射的pdw信息。
11、雷达进行侦察作业时存在四种侦察状态分别为定频定阵面、定频扫阵面、扫频定阵面和扫频扫阵面;若雷达的侦察状态为定频定阵面,则雷达先向微波模块发送一条阵面信息报文,再发送一条频点信息报文;若雷达的侦察状态为扫频扫阵面,则雷达先向微波模块发送一条阵面信息报文,再从起始频率到终止频率按频率步进递增发送频点信息报文,视为完成一个阵面的扫频逻辑,之后按照上述逻辑再发送第二个阵面信息和循环频点切换信息,以此类推直至发送所有阵面和频点信息;若雷达的侦察状态为扫频定阵面,则雷达先向微波模块发送一条阵面信息报文,再从起始频率到终止频率按频率步进递增发送频点信息报文;若雷达的侦察状态为定频扫阵面,则雷达先向微波模块发送一条阵面信息报文,再发送一条频点信息报文,接着发送第二个阵面信息报文,之后再发送频点信息报文,以此类推完成所有阵面的信息报文和频点信息报文的发送。
12、所述状态中的“定”指的是固定单一,“扫”指的是按输入的控制报文信息进行扫描切换;其中阵面信息切换从起始角度到终止角度按照步进进行切换,频点信息切换从起始频率到终止频率按照步进进行切换,在扫频或扫阵面模式时两类信息均为循环发送;阵面信息和频点信息切换逻辑是根据输入的控制报文信息进行控制;
13、所述控制报文信息包含扫频步进δf、起始频率fstart、终止频率fend、扫阵面步进δθ、起始阵面角度θstart和终止阵面角度θend;其中扫频步进是指每次切换频点的固定差值,其计算公式为fend=fstart+n*δf,其中n为切换频点的次数,n∈n*;起始频率是指从此频点开始切换频率;终止频率是指扫描到此频点时表示一个频率扫描周期完成;扫阵面步进是指每次切换阵面角度的固定差值,其计算公式为θend=θstart+r*δθ,其中r为单阵面阵面角度切换次数,r∈n*;起始阵面角度是指从此角度开始阵面切换;终止阵面角度是指扫描到此阵面角度时表示单一阵面扫描完成;
14、此外,在雷达上设置阵面、频点静默时间计数器和静默时间tmo;在静默时间内设置静默标志为1;当雷达处于阵面和频点切换时,令雷达的信息发送和接收处于静默状态,在静默时间内雷达不发送pdw信息并输出静默标志。
15、所述自适应衰减模块包括自动重置单元、存储单元、幅度值判断单元和自动衰减单元;
16、所述自动重置单元实时采集后端控制中心与机载探测器的距离s和当前环境中电磁波传输的速率折射率计算pdw信息接收单元等待信息接收时间的最大阈值twaitmax,其计算公式为若twait>twaitmax,则判断pdw信息接收超时,由后端控制中心对机载雷达探测器发送自检确认报文,在报文发送后记录确认时间tcon,根据公式计算理想信息往返传输时间根据公式计算当前实际信息往返传输时间若则判断后端控制中心与机载探测器之间传输信道正常且雷达位置正确,则雷达探测目标信息异常,导致pdw信息接收超时;若或则判断后端控制中心与机载探测器之间传输信道正常,但雷达位置异常,导致pdw信息接收超时;若tcon>twaitmax,则判断后端控制中心与机载探测器之间传输信道异常,导致pdw信息接收超时;其中,v是电磁波理想状态下的传输速率,twait是pdw信息接收单元实际等待时间,w为频点切换和阵面切换的次数和,其计算公式为w=n+r,其中在不同的雷达侦测状态中频点切换次数和阵面切换次数存在重合,则此时w需要对重合次数进行删减;通过计算后端控制中心与机载探测器之间的报文信息传输时间和探测器对于目标物体的探测途中的频段和阵面侦测所花费时间和探测器侦测信号之间的阵面和频点切换静默时间的和对整个雷达侦测信号的时间进行计算,以此值为最大阈值对实际探测时间进行限制可以得知当前雷达信息接收是否超时;若超时,则对雷达与后端控制中心的传输信道、雷达位置和侦测目标进行异常确定;通过计算雷达与后端控制中心之间的传输时间的实际值和理想值组成区间,若时间处于其中,则传输信道正常;若小于区间或大于区间却没有大于超时时间阈值,则判定为雷达位置异常,若大于超时时间阈值,则为目标信息异常;
17、所述存储单元用于存储原始幅度值a0;原始幅度值为所需侦察目标的理想幅度值;
18、所述幅度值判断单元将接收的信息的幅度值与存储的幅度值进行大小对比,保留相邻幅度信息的最近值are,其计算公式为are=max(a<a0)或are=min(a>a0),其中a为实际信息的幅度值;判断此时are对应的信息的实际功率j(are)是否在功率最大最小限制区间内;通过保留最接近理想目标的幅度值的实际值可以最大程度保证信息的正确性;
19、所述自动衰减单元根据幅度值判断的结果进行衰减操作;根据公式j(aat)=j(are)-a0计算当前信息功率通过常规衰减操作后的信息功率;若j(aat)∈[jmin,jmax],则对此时实际信息功率通过预设常规衰减值进行衰减操作;若则打开自动衰减开关,以衰减自适应变化量为步进对原始衰减值进行数值自动调整,直至调整后的新原始衰减值满足对实际信息功率进行衰减后处于功率最大最小限制区间内;
20、当j(aat)>jmax时,自动衰减的计算公式为
21、jcom=max{j(are)-[a0+(n*δa)]}∈[jmin,jmax];
22、对jcom取jmax对n值进行计算,若计算结果为正整数则完成计算;若计算n值存在小数,则对n就近取最大正整数,根据调整后的n值,计算此时n值对应的jcom;其中jcom为自动衰减后满足jcom∈[jmin,jmax]的最大功率值;n为原始衰减值的调整次数,n∈n*;此时,自动衰减后的新原始衰减值的计算公式为anew=a0+(n*δa);通过公式计算结果不断逼近功率限制区间,取其中最大值,则此值为首要满足区间要求的衰减后的实际值;
23、当j(aat)<jmin,自动衰减计算公式为
24、jfin=min{j(are)-[a0-(n*δa)]}∈[jmin,jmax]
25、对jfin取jmin对n值进行计算,若计算结果为正整数则完成计算;若计算n值存在小数,则对n就近取最小正整数,根据刚调整后的n值,计算此时n值对应的jfin;其中,jfin为自动衰减后满足jcom∈[jmin,jmax]的最小功率值;此时,自动衰减后的新原始衰减值的计算公式为anew=a0-(n*δa);通过公式计算结果不断逼近功率限制区间,取其中最小值,则此值为首要满足区间要求的衰减后的实际值。
26、所述自适应衰减模块接收解析模块传输的衰减报文信息,并将信息作为原始衰减输入值;所述原始衰减输入值包括原始衰减值a0、原始幅度值a0、功率最大最小限制区间[jmin,jmax]、自适应变化量δa;所述自动衰减开关位于自动衰减单元中,用于对实际信号功率值不在最大最小限制区间的值启动自动衰减操作。
27、所述输出模块包括阵面与频点信息输出单元和衰减值输出单元;所述阵面与频点信息输出单元将雷达发送的阵面信息和频点信息进行延时调整,对调整后的阵面与扫频信息的报文控制微波;所述衰减值输出单元根据自动衰减结果进行输出,若实际功率值未进行自动衰减操作,则输出原始衰减值;若实际功率进行自动衰减操作,则输出处理完成的自动衰减值,并以此衰减值为新的原始衰减值。
28、与现有技术相比,本发明所达到的有益效果是:本发明技术方案一方面将多阵面切换控制和扫频逻辑相结合,并将阵面信息提取供给pdw信息和多阵面对应点相位差模块进行取用,保证阵面信息与扫频信息能够灵活切换和精密控制;另一方面对机载雷达侦察系统的衰减机制进行优化,设计自动衰减模块,使得实际机载工作工程中能够稳定接收幅度信息,解析给出合理且匹配的自动衰减值,配合超时自动重置幅度中间参数归零的机制,保证机载设备实际工作中取得的侦察结果具备可信度和准确度。
- 还没有人留言评论。精彩留言会获得点赞!