一种充液航天器输入饱和预定义时间滑模控制方法
本发明涉及航天器控制,具体涉及一种充液航天器输入饱和预定义时间滑模控制方法。
背景技术:
1、随着航天事业飞速发展,对航天器提出了更长的任务周期、更高的性能要求,与此同时对液体燃料的需求量也更多。部分充满的液体燃料会因为航天器的机动而发生晃动,因此对系统产生的晃动力可能会导致航天器执行任务失败,由此产生的液体晃动动力学和姿态控制已经成为航天领域的重要问题之一。
2、而滑模控制方法能够保证航天器系统是渐近稳定的或有限时间稳定的,与渐近稳定的控制方法相比,有限时间稳定的控制器可以提供更好的收敛速度、更好的控制性能和抗干扰性能。虽然有限时间稳定的控制器可以精确的估计到系统状态的稳定时间,但其稳定时间的上界取决于系统初始状态。这意味着当系统的初始状态未知时,就很难估计到系统稳定时间的上界。与此同时,许多学者提出了固定时间稳定的控制器。与有限时间稳定的控制器相比,固定时间稳定的控制器的稳定时间上界不依赖于系统的初始状态,仅依赖于控制器的参数。诚然,这些固定时间稳定的控制器优于有限时间稳定的控制器,但固定时间稳定的控制器与控制器之间的参数关系很难得到。为此,许多学者研究了预定义时间稳定的控制器,其系统稳定时间可以保证为一个常数,由设计者确定。
3、现有的滑模控制方法虽然是一个很好处理姿态稳定的问题的方法,但其本身的符号函数项会产生抖振。此外,在航天器控制系统实际应用中,设计控制律的输出大小会受到实际执行机构的约束,如果不考虑控制器的输入饱和问题,会导致控制器的性能下降,甚至导致航天器整个系统失衡。因此,现有技术急需要克服执行机构饱和情况下的预定义时间稳定问题,以及滑模控制本身的抖振问题。
技术实现思路
1、本发明的目的在于提供一种充液航天器输入饱和预定义时间滑模控制方法,解决上述技术问题。
2、本发明的目的可以通过以下技术方案实现:
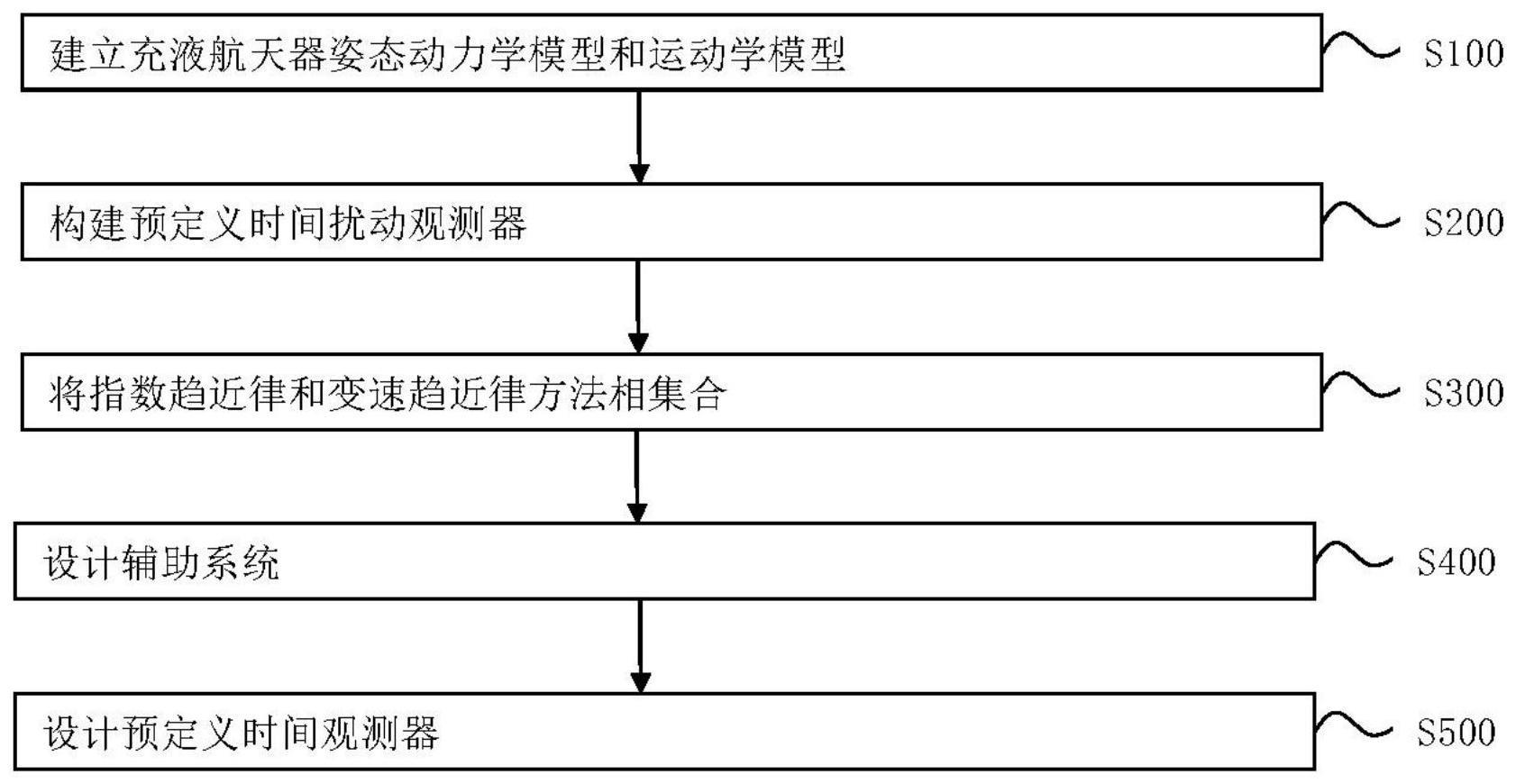
3、一种充液航天器输入饱和预定义时间滑模控制方法,包括以下步骤:
4、步骤1:建立充液航天器姿态运动学模型和动力学模型;
5、步骤2:构建预定义时间扰动观测器;
6、步骤3:将指数趋近律和变速趋近律方法相结合;
7、步骤4:设计辅助系统;
8、步骤5:结合步骤2中的观测器输出值,步骤3中的趋近律结合方法和步骤4中的辅助系统设计预定义时间滑模控制器。
9、作为本发明进一步的方案:在所述的步骤1中,所述的充液航天器姿态运动学模型为:
10、
11、g(q)=q0i3+q×;
12、其中,[q0,qt]t=[q0,q1,q2,q3]t为四元数,满足i3为3×3单位矩阵,ω=[ω1,ω2,ω3]t为航天器角速度,q×是斜对称矩阵;
13、所述充液航天器动力学模型为:
14、
15、
16、
17、其中,i为相对于质心的转动惯性矩阵,m是液体的质量,u=sat(te)为控制力矩,考虑执行器的输出饱和特性,rp为p到ct的矢径,rt为c到ct的矢径,r为ct到s的矢径,e和r分别是r的单位向量和模长,vs和ω分别是液体相对于储箱的速度和角速度,fl和tl分别是液体对储箱产生的晃动作用力和力矩,td为外部扰动力矩。
18、作为本发明进一步的方案:在所述的步骤2中,所述的预定义时间扰动观测器的具体构建方法如下所示:
19、将充液航天器动力学模型重写为:
20、
21、其中,β1>0,δlumped=β1ω-i-1ω×(i·ω)+tl+(rp+rt)×fl+td;
22、引入辅助系统:
23、
24、定义z为y与ω之间的误差,可以得到:
25、
26、设计预定义时间扰动观测器:
27、
28、其中,是z的估计值,0<γ1<1,tc1>0是可调收敛时间。
29、作为本发明进一步的方案:在所述的步骤3中,所述的指数趋近律和变速趋近律包括:
30、指数趋近律为:
31、
32、其中,s为待设计的滑模面,k1>0,k2>0;
33、变速趋近律为:
34、
35、其中,φ=||q||+||ω||;
36、将指数趋近律和变速趋近律结合设计为:
37、
38、其中,0<k3<1。
39、作为本发明进一步的方案:在所述的步骤s4中,所述的辅助系统包括:
40、
41、其中,δu=sat(te)-u,tc4>0,0<γ4<1,0<κ<1。
42、作为本发明进一步的方案:在所述的步骤5中,设计预定义时间滑模控制器具体包括:
43、定义lyapunov函数设计预定义时间滑模面:
44、
45、其中,tc2>0,0<γ2<1;
46、设计预定义时间滑模控制器:
47、
48、其中,te1为指数趋近律和变速趋近律的结合,0<k4<1。
49、本发明的有益效果:本发明提供的含输入饱和的充液航天器预定义时间姿态滑模控制方法,属于含输入饱和航天器预定义时间滑模姿态控制领域。本发明建立了有输入饱和的充液航天器的运动学模型和动力学模型,运动学模型采用四元数描述,在动力学模型中,用运动脉动球模型等效液体的大幅晃动。在姿态设计的过程中,首先构造了预定义时间扰动观测器,用于观测系统集总扰动,其次设计预定义时间滑模面,使其收敛到平衡位置的时间在设计者定义的时间内,最后设计趋近律结合的方式削弱滑模的抖振以及设计辅助系统处理输入饱和。通过数值方法验证了本发明提出控制方法的有效性和鲁棒性。
技术特征:
1.一种充液航天器输入饱和预定义时间滑模控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种充液航天器输入饱和预定义时间滑模控制方法,其特征在于,在所述的步骤1中,所述的充液航天器姿态运动学模型为:
3.根据权利要求1所述的一种充液航天器输入饱和预定义时间滑模控制方法,其特征在于,在所述的步骤2中,所述的预定义时间扰动观测器的具体构建方法如下所示:
4.根据权利要求1所述的一种充液航天器输入饱和预定义时间滑模控制方法,其特征在于,在所述的步骤3中,所述的指数趋近律和变速趋近律包括:
5.根据权利要求1所述的一种充液航天器输入饱和预定义时间滑模控制方法,其特征在于,在所述的步骤s4中,所述的辅助系统包括:
6.根据权利要求1所述的一种充液航天器输入饱和预定义时间滑模控制方法,其特征在于,在所述的步骤5中,设计预定义时间滑模控制器具体包括:
技术总结
本发明涉及航天器控制技术领域,具体涉及一种充液航天器输入饱和预定义时间滑模控制方法,包括以下步骤:步骤1:建立充液航天器姿态运动学模型和动力学模型;步骤2:构建预定义时间扰动观测器;步骤3:将指数趋近律和变速趋近律方法相结合;步骤4:设计辅助系统;步骤5:结合步骤2中的观测器输出值,步骤3中的趋近律结合方法和步骤4中的辅助系统设计预定义时间滑模控制器。本发明可以克服执行机构饱和情况下的预定义时间稳定问题,以及滑模控制本身的抖振问题。
技术研发人员:宋晓娟,范志文,吕书锋,唐术锋,许恩永,邹云鹤,时浩翔,尹宏飞
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!