一种基于云边协同的车辆编队模型预测控制方法
本发明涉及智能网联汽车(intelligent and connected vehicles,icvs)编队控制,具体涉及一种基于云边协同的车辆编队模型预测控制方法。
背景技术:
1、当前,汽车产业正发生百年来最深刻的变革,智能网联被认为是未来竞争的焦点。随着汽车信息通讯、人工智能、互联网等行业深度融合,icvs已经进入技术快速演进、产业加速布局的新阶段。与传统自动驾驶技术相比,icvs引入了云控制系统(cloud controlsystem,ccs)的概念,利用云端可实现信息的互联与共享,利用云计算可以更加快速、高效地解决包含海量数据的复杂智能系统的控制问题。
2、利用基于事件触发的云边协同dmpc技术来解决icvs的编队控制问题。云边协同控制是指将基于云计算的控制与基于边缘计算的控制相结合的一种控制方法,基于云计算的控制主要是利用云端强大的计算与存储资源,完成更加复杂的计算任务,一般将高精度的复杂非线性模型部署到云端。然而,由于云计算较为依赖于网络通信质量,当出现较大通信延迟或通信中断等情况时,可能会对控制性能产生影响。基于边缘计算的控制一般部署在车载移动计算设备上,不需要经过网络传输信息,因此更加安全可靠,但是相比于云端而言计算资源较为有限,只能执行复杂度较低的计算任务。事件触发控制是与传统的连续周期控制不同的一类控制方法,它不会在每个采样周期都执行计算,而是只在一些由系统稳定关系决定的特定时刻才去计算或改变控制输入,因此可以避免不必要的计算和操作,从而节约系统的资源和能源消耗。
3、编队技术在自动驾驶领域有着广泛应用。车辆编队控制方法一般可分为集中式控制和分布式控制两类。集中式的控制器使用所有车辆的信息作为输入来进行计算,设计较为容易,也能够获得全局最优控制性能,但随着队列内车辆数目的增多,集中式控制器的计算量会急剧增长,从而影响控制的实时性。而分布式控制的思想则是将整个编队系统划分为多个子系统,每个子系统均采用传统的针对单一对象的控制器,通过考虑子系统的目标、约束、扰动、动力学以及各个系统之间的相互作用对来系统进行控制,具有很强的可扩展性与实用性。模型预测控制(model predictive control,mpc)是一种基于最优化思想,能够较好应对不确定性以及非线性、显示处理控制约束的先进控制方法,在自动驾驶车辆控制领域有着广泛应用。dmpc算法是mpc在分布式架构中的实现,在车辆编队问题中,dmpc算法将控制任务分配给队列内的车辆,各车辆只需要关注自身局部最优控制问题的构建与计算,并按照设定的通信拓扑结构与其他车辆交换必要信息即可。dmpc也是目前车辆编队控制中使用最为广泛的一种控制算法。
4、现有自动驾驶车辆编队大多是采用纯边缘控制器,而随着交通路况复杂度的不断增长,车载边缘控制器或将难以满足更高精度与更高安全性的控制需求,而云端控制又易受到通信与网络质量的影响,可靠性较低,因此云边协同控制将成为更加有效、可靠的解决方案;而已有关于云边协同的研究未考虑分布式控制问题,且大多倾向于使用云为主控制器,频繁请求云计算,未充分考虑计算成本。
技术实现思路
1、有鉴于此,本发明提供了一种基于云边协同的车辆编队分布式模型预测控制方法,以云控制器作为核心控制模块,利用其丰富的计算资源来解决更复杂的控制问题,保证控制性能;同时,以边缘控制器作为备用模块,利用其低延迟与高可靠性,可在云控制器失效时进行补足,保证系统稳定性不受破坏。最后再通过mpc与事件触发机制相配合,能够在本地计算资源以及车辆间通信资源受限的条件下,通过尽可能少地请求云计算次数来提高系统的控制性能,降低资源消耗。
2、为达到上述目的,本发明提供的一种基于云边协同的车辆编队模型预测控制方法,其技术方案包括:
3、构建车辆纵向非线性动力学模型并完成线性化与离散化。
4、构建边端分布式线性模型预测控制dlmpc控制器以及云端分布式非线性模型预测控制dnmpc控制器。
5、设定云边通信方式,设定边端dlmpc控制器在每一时刻均进行运算,设定云端dnmpc控制器在事件触发机制下进行运算,执行云边协同控制。
6、进一步地,构建车辆纵向非线性动力学模型并完成线性化与离散化,具体包括如下步骤:
7、步骤1.1:建立单一车辆连续非线性模型
8、对于由n+1辆车组成的车辆队列,包括1辆领导车以及n辆跟随车,其中领导车编号为0,跟随车编号为1,2,...,n,定义正整数集合
9、构建车辆纵向非线性动力学模型的前提条件包括(1)~(4)条:
10、(1)轮胎纵向滑移忽略不计,将动力系统动力学归类为一阶惯性传递函数;
11、(2)车身是刚性且对称的;
12、(3)忽略偏航运动的影响;
13、(4)驱动力矩和制动力矩是可控的输入;
14、建立车辆i,的纵向非线性动力学模型如下:
15、
16、
17、其中,系统状态量为:[si,vi,ti]t,si(t)、vi(t)、ti(t)分别为第i辆车t时刻的纵向位置、纵向速度和车轮驱动力矩,分别为t时刻si(t)、vi(t)、ti(t)的一阶导数;mveh,i为第i辆车的质量,ηt,i为第i辆车的机械传动效率,ri为第i辆车的轮胎半径,τi为第i辆车的车辆力矩惯性因子,ca,i为第i辆车的风阻系数,fi为第i辆车的摩擦系数,g为重力加速度;ui(t)为第i辆车t时刻的控制量输入;fveh,i为车辆受到的合阻力,与车辆行驶纵向速度vi(t)有关;
18、步骤1.2:针对所述纵向非线性动力学模型进行离散化与线性化:
19、采用前向欧拉法对动力学方程进行离散化,得到:
20、
21、其中△t为采样时间,si(t+1)、vi(t+1)、ti(t+1)为t+1时刻车辆i的纵向位置、纵向速度和车轮驱动力矩;
22、对式(2)进行线性化:首先对原三阶动力学模型进行降阶简化,不考虑输入驱动力矩的惯性环节,即直接将驱动力矩ti(t)作为系统新的控制输入得到二阶非线性动力学模型如下:
23、
24、采用反馈线性化方法,设定新的输入量为
25、
26、代入式(3)中得到线性系统:
27、
28、新控制量与降阶模型控制量的转化关系:
29、
30、此时所求出的最优控制输入相当于原高阶模型中的驱动力矩ti(t),相当于ti(t+1),根据原高阶离散动力学模型中的惯性环节,求出原控制量ui(t)为:
31、
32、此时只用求解二阶线性mpc问题,并对得到的控制量先后按照式(6)和式(7)进行补偿即可。
33、进一步地,构建边端分布式线性模型预测控制dlmpc控制器以及云端分布式非线性模型预测控制dnmpc控制器,具体包括如下步骤:
34、步骤2.1:构建通信拓扑结构。
35、假设本地车辆间的通信资源受限,仅能实现单前车通信pf拓扑结构,在该通信方式下,每辆车只接收相邻前车所发送来的信息;云端采用前车-领导车通信plf拓扑结构,每辆车不仅能够获得前车的状态序列信息,还能够直接获得期望序列信息即领导车辆信息;
36、步骤2.2:构建车辆编队系统约束以及控制目标;
37、所述车辆编队系统约束包括单一车辆行驶约束以及车辆间安全约束;所述单一车辆行驶约束包括速度约束、加速度约束、驱动力矩约束;所述车辆间安全约束包括安全距离约束;
38、所述控制目标为在恒定车间距的策略下维持队列内车辆行驶的速度一致性以及编队稳定性;
39、步骤2.3:构建局部线性最优控制,具体为:设定领导车辆直接获得期望速度序列信息,其余辆跟随车则是以前车输出序列信息作为期望,并使用上一时刻自身所计算的最优输出序列信息作为修正,构造局部线性最优控制问题。
40、进一步地,速度约束为:
41、
42、其中vi为车辆i的行驶速度;为车辆i行驶速度的约束集;vmin,i和vmax,i为速度约束的上下界;
43、所述加速度约束为:
44、
45、其中ai为车辆i行驶加速度;为车辆i行驶加速度的约束集;amin,i和amax,i为约束的上下界;
46、所述安全距离约束为在队列行驶中,相邻车辆保持一定的安全距离dsafe:
47、si-1-si≥dsafe (10)
48、其中dsafe为设定的安全距离;si-1为第i-1辆车的位移;si为第i辆车的位移;
49、所述驱动力矩约束为:
50、
51、其中ui为车辆i输入控制力矩;为车辆i输入控制力矩的约束集;umin,i和umax,i为约束的上下界;
52、所述控制目标为:采用恒定车间距策略并维持队列内车辆行驶速度的一致性,在这种策略中,领导车辆的控制目标就是跟随期望的速度序列,跟随车辆的控制目标则是在与前方车辆维持恒定车距的情况下跟随领导车辆速度变化,即
53、
54、其中,v0(t)为t时刻领导车辆行驶速度,si-1(t)为第i-1辆车t时刻的位置,si(t)为第i辆车t时刻的位置,di-1,i为第i-1辆车与第i辆车之间的期望间隔距离,其取值决定了队列的几何构型。对于发明所研究的恒定车距策略而言,di-1,i为一个定值,且对于任意位置处的车辆而言,di-1,i的值均相等,即各相邻车辆之间保持相同车距,定义该车距为d0;
55、初始时,系统处于稳态,队列内各车辆具有一致性速度,对应的加速度为0,转换为动力学关系即驱动力与外部阻力相平衡:
56、
57、其中hi(v0)为v0速度下平衡时的外部阻力矩,与车辆行驶速度有关。
58、所述构建局部最优控制问题。
59、在构建局部最优控制问题时,所有的车辆都具有相同长度的预测时域范围为np和采样时间为△t;(k|t)表示从t时刻开始第k步的预测值;
60、三种类型的状态轨迹分别为:
61、预测状态轨迹表示mpc在构造最优控制问题时,使用预测模型所计算出的未来np范围内系统的状态序列,属于待优化的变量;
62、最优状态轨迹表示数值求解局部最优控制问题后得到的状态最优解;
63、假定状态轨迹由车辆上一时刻最优状态轨迹构造,假定变量将作为信息在各车辆间进行传递。
64、三种类型的控制输入,分别为:预测控制输入最优控制输入和假定控制输入
65、三种类型的输出轨迹,分别为:预测输出轨迹最优输出轨迹和假定输出轨迹
66、构建节点车辆i,的局部最优控制问题为:
67、
68、满足如下约束:
69、
70、
71、
72、
73、
74、
75、
76、
77、
78、式(14)中为车辆i接收到的来自车辆i-1的假定输出序列,式(15)中ψi为系统预测方程,在云端为非线性形式如式(2),在边端则为线性形式如式(5);式(16)代表系统输出方程,γ为输出矩阵;式(17)代表状态量的初值约束,xi(t)为车辆i在t时刻通过传感器测量得到的状态值;分别代表车辆i的预测加速度、预测速度和预测位置,tip(np∣t)为车辆i驱动力矩预测序列的终端值,为车辆i-1的预测位置,上述预测量主要用于构建系统约束;为车辆i行驶在预测时域终端速度下的外部阻力矩;式(22)和式(23)为系统终端等式约束,强制将车辆i预测输出的终端值拉到集合中各假定输出序列的终端平均值处,表示所有能够向节点i发送信息的节点集合,以及强制使车辆i在预测时域终端以恒定速度移动,其中为接收集合的基数;其中di,j表示车辆i和车辆j之间的期望距离;式(14)中求和项li的具体形式如下:
79、
80、其中qi、ri、fi、gi为车辆i成本函数的四个半正定权重矩阵,qi惩罚了车辆i的预测输出与期望输出ydes,i(k|t)之间的偏差;ri惩罚了车辆i的控制量偏离平衡状态外部阻力矩的程度,使车辆更倾向于保持恒定速度;fi惩罚了车辆i的预测输出与假定输出的偏差,使车辆更倾向于保持上一时刻的最优轨迹行驶;gi惩罚了车辆i的预测输出与来自前车的假定输出之间的偏差,协调了车辆i与前车之间的行驶轨迹;qi、gi的取值受通信拓扑结构影响,当车辆能够直接获得期望序列,即领导车辆信息时,则qi>0,如边端领导车辆以及云端所有车辆,否则qi=0。当车辆能够获得前车信息时,gi>0,否则gi=0;ri、fi只与车辆自身相关,设定为始终大于0;
81、由此得到云端与边端dmpc算法除模型外的第二个区别,即成本函数中的权重矩阵不相同;
82、第i辆车在t+1时刻的假定输出序列由它在该时刻的假定控制序列计算得到,而t+1时刻的假定控制序列与t时刻的最优控制序列有关,具体构造方法如下:
83、
84、其中为求解优化问题得到的最优速度序列的终端值;
85、t+1时刻假定控制序列的构造是由t时刻的最优控制序列前移一位,舍弃第一个元素,并在最后添加一个稳态值得到;有了假定控制序列后,代入系统状态方程即可计算得到t+1时刻的假定输出序列,如式(26)所示:
86、
87、进一步地,设定云端dnmpc控制器在事件触发机制下进行运算,具体为:
88、采用一个性能评估函数作为事件触发函数,其基本思想是最小化未来输出误差累计成本;所述性能评估函数为jt,i,jt,i具体如下:
89、
90、式中lt,i的具体形式如下:
91、
92、其中,qt,i和gt,i为性能评估函数的权重矩阵,取值与所构建的优化问题中对应权重矩阵的取值相同;
93、边端dlmpc控制器在每一采样周期都执行,以确保在网络异常的情况下,系统在每一时刻都能有一个可行的控制方案以维持编队的稳定性;
94、在每一时刻t,至少有两个控制量供选择,分别是边端dlmpc在该时刻计算出的控制序列中的第一个元素以及上一次tc时刻云端dnmpc计算出的控制序列在当前时刻的对应值为了选出性能更优的控制量,下面基于式(27)和(28)分别定义针对边端和云端控制序列的性能评估函数;首先定义边端控制序列的性能评估成本je,t,i为:
95、
96、其中,分别代表t时刻边端dlmpc计算出的最优输出序列和最优控制序列,tc即上一次触发云计算的时刻;
97、同理,定义云端控制序列的性能评估成本jc,t,i为:
98、
99、其中,分别代表t时刻云端dnmpc计算出的最优输出序列和最优控制序列;
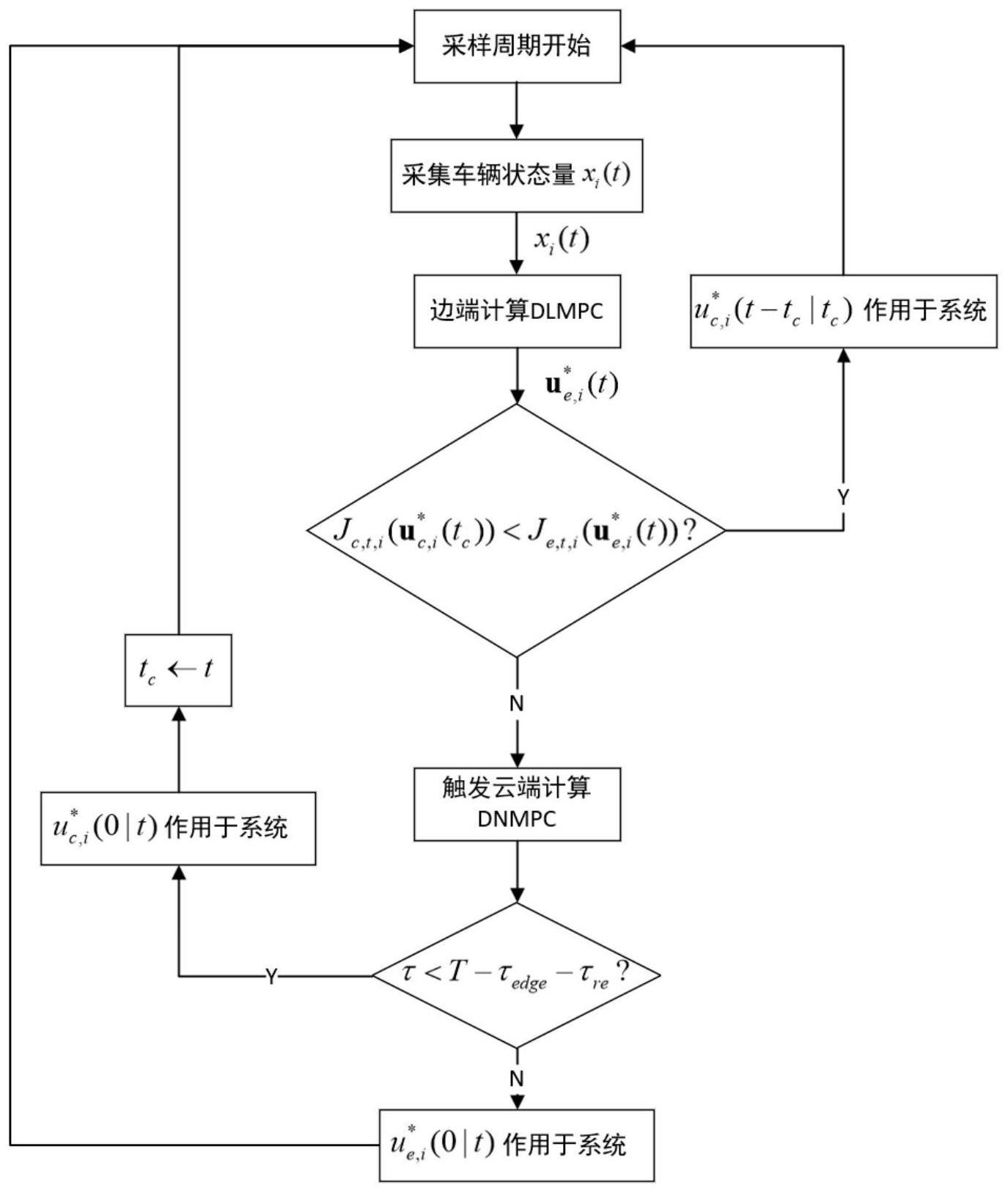
100、此时具体切换策略为:
101、
102、其中,u(t)为t时刻最终作用于系统的控制输入,式(29)和(30)在云端和边端得到的两个控制序列中分别截取片段的长度均为np-t+tc,且截取部分从第1个元素至第np-t+tc个元素的预测时刻一一对应,τc,i为车辆i对应云端计算存在的总延时,包括数据从车辆通过网络上传到云端的上行延时,云端dnmpc的计算耗时,和数据从云端返回至车辆执行器的下行延时;τe,i为车辆i边端dlmpc算法的计算耗时,τre,i为车辆i的总预留时间,用于执行器等其他模块完成工作,采样周期为t;
103、则具体触发与切换策略如下,若上一次云端计算出的控制序列性能更优,即jc,t,i≤je,t,i,则直接将其在当前时刻的对应值作用于系统;若当前时刻边端计算出的控制序列性能更优,即jc,t,i>je,t,i,则触发云端dnmpc的计算;当云端计算过程总延时τ<t-τedge-τre时,认为计算成功,将云最新返回结果的第一个元素作用于系统,并更新tc←t。若τ≥t-τedge-τre,则认为计算失败,边端将主动断开与云端的连接,不接受本次计算结果,并使用当前时刻边端dlmpc计算结果的第一个元素作用于系统。
104、进一步地,设定云边通信方式,具体为:选择websockets协议作为云边之间的通信协议,边端相邻车辆之间存在单向数据传输通道,各车辆与对应云端容器通过websockets协议建立连接,云服务器中各个容器则通过redis数据库实现并发数据交换。
105、进一步地,执行云边协同控制,具体为:
106、步骤4.1:初始化各车辆的假定变量,以用于通信与控制。
107、初始时,各车辆均工作于平衡状态下,即保持匀速行驶,且车辆和道路环境参数均已知,根据动力学模型,此时只要指定行驶的速度和初始位置两个状态量的初值,即可计算出各车辆初始时刻的控制输入,从而构造出假定变量:
108、
109、其中分别代表初始t=0时刻车辆i的假定控制序列、假定输出序列和预测输出序列,hi(vi(0))为初始时刻外部阻力矩,与驱动力矩相平衡,为系统初始输出,包括速度和位置两个状态量。
110、步骤4.2:对于队列内某一车辆i,采样周期开始时,首先由车辆传感器测量得到当前系统状态量xi(t)。
111、步骤4.3:利用边端dlmpc控制器进行运算,得到当前时刻最优控制序列
112、步骤4.4:进行性能评估与事件触发判断,具体为:
113、对于第一个采样周期,不进行控制量性能比较,而是无条件触发云计算,如果未能拿到云端结果,则下一采样周期同样无条件触发云,直至能够拿到可用结果为止;当存在云计算结果时,则4截取上一次云端计算出的控制序列和边端当前时刻计算出的控制序列并使用性能评估函数计算二者代价,代价值越小代表性能越优,若当前时刻边端计算出的控制序列性能更优,则触发云端dnmpc控制器的计算,并进入步骤4.5;否则直接进入步骤4.6。
114、步骤4.5:云端dnmpc控制器中容器i,接收边端车辆i,上传的本车的输出序列前车假定序列时间戳t信息,并构造非线性局部最优控制问题,完成求解,将得到的结果下发到边端。
115、步骤4.6:云端dnmpc控制器计算期间边端实时监测云端计算总延时τ,将云边通信中断视作无限大的延迟;根据式(31)选出最终作用于系统的控制量u(t)。
116、步骤4.7:边端利用计算出的最优控制序列以及预测模型递推最优状态序列即按照式(25)和(26)中的方法构造下一时刻假定输出序列并发送给后车,同时接收前车的假定输出序列数据准备在下一采样周期中使用。
117、有益效果:
118、本发明针对异构车辆编队纵向速度跟驰问题,提供了一种基于云边协同的dmpc控制方法,将云端基于非线性模型的dnmpc控制器和边端基于线性模型的dlmpc控制器相结合,使用事件触发机制对控制器进行切换。利用云端容器化技术,充分发挥了云计算并行求解与算力资源自主调度的优势,同时利用边端控制器的低延迟和高可靠性,在保证控制性能与系统稳定性的基础上减少了云计算资源的消耗,有效节约了计算成本,具有较强的鲁棒性与实用性。本发明经过实验表明了算法的可行性,相比于仅使用基于边缘计算的dlmpc进行控制,所提出的云边协同控制方法使得车辆队列的整体速度一致性有所改善,速度变化时超调更小,过渡过程更加平缓。当前智能网联汽车关于云端的使用主要集中在规划层面,因此本发明也为其控制任务向云端的转移提供了一种可靠的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!