一种基于几何方法的无人机多面体飞行走廊构建方法
本发明涉及无人机自主避障,特别是涉及一种基于几何方法的无人机多面体飞行走廊构建方法。
背景技术:
1、安全飞行走廊(safe flight corridor,sfc)被提出用于解决优化条件非凸性的问题。此前在基于sdf地图或者其他基于距离来衡量梯度的地图中,环境梯度信息几乎都具备非凸性,而在线求解一个非凸问题通常是非常复杂的,甚至可能无法求出最优解。飞行走廊则能够将非凸表征的空间信息,通过飞行走廊构建算法,转化成具备凸性的空间信息,即把优化问题转化成一个凸优化问题,能够提升优化求解效率和解的质量。
2、现有的安全飞行走廊构建方法有如下几种:(1)球形飞行走廊的构建,在基于kd树表示的地图数据结构中构建。由于地图中任意点的安全半径可以通过kd树中的快速最邻近搜索方法找到,可以轻易获取坐标点到最近障碍物的距离,以该距离为球形走廊的半径,并采用基于随机采样的方法来连接起点到目标点的路径,以该路径上的点来构建出连续球形走廊。球形走廊的优势在于构造简单,只需要找到安全半径这一个参数就能构建出一个球体。但球形走廊的空间利用率较低,路径优化的自由空间较小。(2)立方体走廊的构建,通过构建esdf地图找到最大半径球体,再将该球体的内接正方体进行轴向扩张构建,该构建方法不依赖八叉树地图结构,因此能包含更多的自由空间。立方体走廊的好处是空间易于表达,可以通过走廊空间六个表面与对应坐标轴的交点来简单参数化表示该空间,即将坐标点限制在由三轴表示的上下界内即可。但缺点是在非凸空间中,立方体走廊不能获取更多自由空间。(3)多面体走廊的构建,首先构造一个包含整段路径的球,再将球压缩成椭球体,并向外膨胀,更新椭球长短半轴的长度,与障碍相交的地方做切平面,得到凸多面体走廊。该方法的优势是能够获取空间利用率更大的凸多面体走廊,但由于需要更新长短半轴两个参数导致走廊构建消耗时间较长。
3、由此可知,现有技术中球形、立方体走廊的空间利用率较低,多面体走廊的构建时间较长,因此针对上述技术缺陷,本发明提出一种基于几何方法的无人机多面体飞行走廊构建方法。
技术实现思路
1、本发明的目的是针对上述技术问题,提供一种基于几何方法的无人机多面体飞行走廊构建方法,构建多面体走廊,能够在保证飞行走廊大小的同时,减小构建走廊所需要的时间。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于几何方法的无人机多面体飞行走廊构建方法,包括:
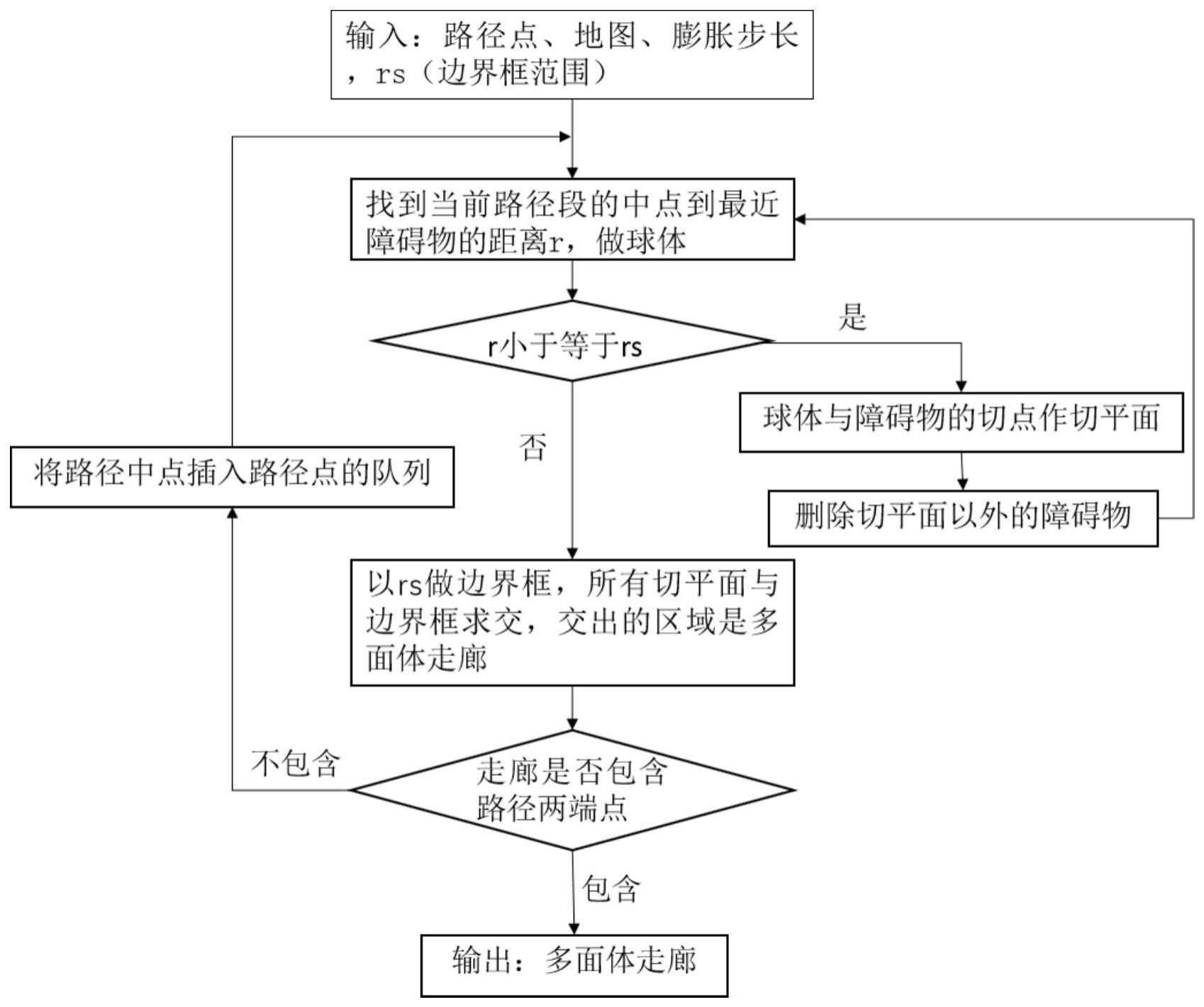
4、获取无人机飞行路径段以及路径段周围的障碍物,寻找所述路径段上的目标球形走廊;
5、基于所述目标球形走廊和障碍物,构建切平面,并删除所述切平面以外的障碍物;
6、基于未删除的障碍物迭代寻找所述路径段上的新的目标球形走廊,构建新的切平面,删除所述新的切平面以外的障碍物,直至所述球形走廊超出预设的边界;
7、将所有切平面与所述预设的边界相交,获取多面体飞行走廊。
8、进一步地,获取无人机飞行路径段以及路径段周围的障碍物,寻找所述路径段上的目标球形走廊包括:
9、以所述路径段的中点为球心,所述路径段的中点到最近障碍物的距离为半径,寻找所述路径段上的目标球形走廊。
10、进一步地,基于所述目标球形走廊和障碍物,构建切平面包括:
11、以所述目标球形走廊与最近障碍物的接触点为切点,构建相切于所述目标球形走廊的切平面。
12、进一步地,所述预设的边界为立方体,所述立方体与所述路径段平行,且所述立方体的每个面到所述路径段的最小距离相等。
13、进一步地,所述立方体的每个面到所述路径段的最小距离满足其中,rs为所述立方体的每个面到所述路径段的最小距离,vmax,amax分别为无人机的最大速度和最大加速度。
14、进一步地,将所有切平面与所述预设的边界相交,获取所述多面体飞行走廊后,还包括对所述多面体飞行走廊进行验证。
15、进一步地,对所述多面体飞行走廊进行验证包括:
16、检查所述路径段的两端点是否包含在所述多面体飞行走廊内部,若不包含,则将所述路径段的中点插入路径段的点队列中,并将插入中点后的点队列再次进行飞行走廊构建。
17、本发明的有益效果为:
18、本发明所构建的多面体走廊是在球形走廊的基础上进行进一步膨胀,因此空间利用率大于球形走廊;而在非凸空间中,多面体能捕获更大区域,因此空间占用率大于立方体走廊。多面体走廊每次膨胀实际上只用寻找一个参数,从而获取超平面来构成多面体,而立方体走廊需要获取七个参数,才能构建出走廊,因此本发明大大缩短构建时间,且本发明的方法只需迭代一个参数,就能满足前后端点被包含在走廊内部。本发明可以将基于距离梯度的非凸优化条件,转化为基于飞行走廊的凸优化条件,更有利于轨迹高效的优化求解。
技术特征:
1.一种基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,包括:
2.根据权利要求1所述的基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,获取无人机飞行路径段以及路径段周围的障碍物,寻找所述路径段上的目标球形走廊包括:
3.根据权利要求2所述的基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,基于所述目标球形走廊和障碍物,构建切平面包括:
4.根据权利要求1所述的基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,所述预设的边界为立方体,所述立方体与所述路径段平行,且所述立方体的每个面到所述路径段的最小距离相等。
5.根据权利要求4所述的基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,所述立方体的每个面到所述路径段的最小距离满足其中,rs为所述立方体的每个面到所述路径段的最小距离,vmax,amax分别为无人机的最大速度和最大加速度。
6.根据权利要求1所述的基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,将所有切平面与所述预设的边界相交,获取所述多面体飞行走廊后,还包括对所述多面体飞行走廊进行验证。
7.根据权利要求6所述的基于几何方法的无人机多面体飞行走廊构建方法,其特征在于,对所述多面体飞行走廊进行验证包括:
技术总结
本发明涉及一种基于几何方法的无人机多面体飞行走廊构建方法,包括:获取无人机飞行路径段以及路径段周围的障碍物,寻找所述路径段上的目标球形走廊;基于所述目标球形走廊和障碍物,构建切平面,并删除所述切平面以外的障碍物;基于未删除的障碍物迭代寻找所述路径段上的新的目标球形走廊,构建新的切平面,删除所述新的切平面以外的障碍物,直至所述球形走廊超出预设的边界;将所有切平面与所述预设的边界相交,获取多面体飞行走廊。本发明所提出的构建多面体飞行走廊的方法,能够在保证飞行走廊大小的同时,减小构建走廊所需要的时间。
技术研发人员:牛轶峰,王钟鸣,马兆伟,王菖,刘运卓,王梦云,马蔼彤
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!