一种虚拟仿真场景中主车的运动控制方法及系统与流程
本发明属于自动驾驶,具体的说是一种虚拟仿真场景中主车的运动控制方法及系统。
背景技术:
1、在迅猛发展的自动驾驶领域,高效准确的激光雷达算法成为实现自动驾驶的核心挑战。然而,基于实际道路数据进行算法研发涉及昂贵的车辆采集、时间投入以及人力资源成本,同时还要应对严格的车辆安全性标准。为了解决这一复杂问题,基于ros的激光雷达数据生成与回灌方法应运而生,为智能网联汽车算法研究提供了高效且经济的解决途径。
技术实现思路
1、为解决上述问题,本发明提供了一种虚拟仿真场景中主车的运动控制方法及系统,采用ros机器人系统,以实现双重数据注入策略,旨在有效融合虚拟仿真环境和实际车辆数据,能够精准控制虚拟仿真场景中主车的运动,本发明不仅能够降低开发成本,还有助于在安全的环境中对算法性能和安全性进行全面评估,以满足严格的智能网联汽车系统标准。
2、本发明技术方案结合附图说明如下:
3、第一方面,本发明提供了一种虚拟仿真场景中主车的运动控制方法,包括以下步骤:
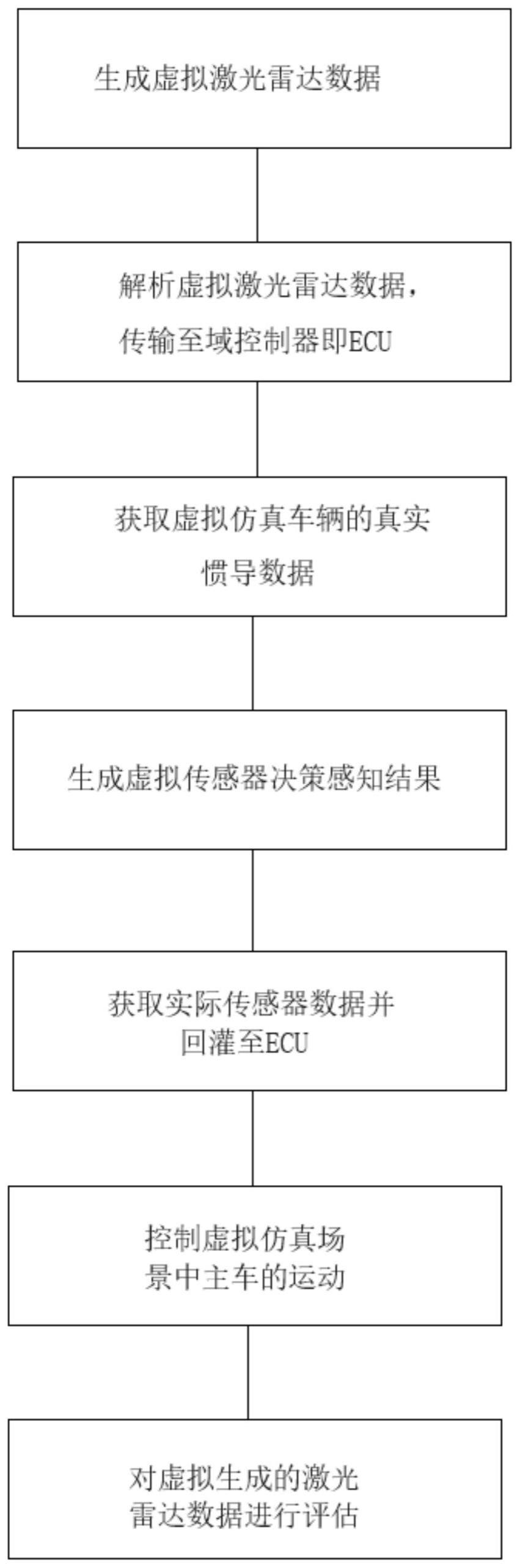
4、步骤一、在虚拟仿真环境中使用optix技术模拟激光雷达的物理运作原理,生成虚拟激光雷达数据;
5、步骤二、通过ros解析虚拟激光雷达数据,并通过udp发送至车载以太网板卡,再由板卡传输至域控制器即ecu;
6、步骤三、通过虚拟激光雷达数据获取虚拟仿真车辆的位姿信息,将车辆的位姿信息传输至六自由度平台,在六自由度平台上装配imu获取虚拟仿真车辆的真实惯导数据,并注入至ecu;
7、步骤四、将真实的惯性导航数据与虚拟仿真环境中带有实际环境特征的激光雷达数据相融合,并整合虚拟仿真场景中的相机和gnss真实数据,生成虚拟传感器决策感知结果,以支持决策感知任务;
8、步骤五、在虚拟仿真服务器中即搭载虚拟仿真软件平台即ubuntu系统,通过rosbag数据回放机制,对车辆实际道路收集的数据进行回放;并通过udp通信协议将收集到的实际传感器数据回灌至ecu,以生成来自实际道路采集的决策和感知结果;
9、步骤六、将虚拟传感器决策感知结果嵌入到车辆动力学模型中,以控制虚拟仿真场景中主车的运动;
10、步骤七、进行激光雷达数据级和决策算法感知级之间的对比,对虚拟生成的激光雷达数据进行评估。
11、进一步的,所述步骤一中,模拟激光雷达时需模拟不同激光雷达类型,并模拟各种天气条件。
12、进一步的,所述步骤一的具体方法如下:
13、11)在虚拟仿真环境中获取激光雷达的参数;
14、所述激光雷达的参数包括探测距离d、发射激光功率pt、发射激光的波长λ、脉冲宽度τ、脉冲重复频率f、视场角fovh、分辨率δd和消光系数γ;
15、其中,探测距离d通过下式计算:
16、
17、式中,d为探测距离;c为光速;δt为时间差;
18、将激光雷达的探测能力从能量的角度描述,由激光雷达作用距离方程表达,如下所示:
19、
20、式中,pr为接收激光功率;pt为发射激光功率;gt为发射天线增益;σ为目标散射截面;d为接收孔径;ηatm为单程大气传输系数;ηsys为激光雷达的光学系统的传输系数;
21、其中,所述发射天线增益gt被分解为:
22、
23、
24、式中,θt为发射激光的带宽;λ为发射激光的波长,设定为905nm;ka为孔径透光常数;
25、故,激光雷达作用距离方程如下所示:
26、
27、确定激光雷达最大可探测距离rmax,如下所示:
28、
29、式中,σ为目标散射截面决定目标反射的属性;prmin为激光雷达系统中所需的探测最小功率;
30、其中,单程大气传输系数ηatm由下式表示:
31、ηatm=exp[-2γ(λ)r]
32、式中,γ为距离发射端r处的大气衰减系数;大气衰减系数是波长的函数,由环境中的两部分带来,一部分是大气气体分子,一部分是大气气溶胶,即:
33、γ(λ)=γmolecules(λ)+γaerosol(λ)
34、式中,γmolecules(λ)为大气气体分子衰减系数;γaerosol(λ)为大气气溶胶衰减系数;
35、当波长为905nm时,大气引起的激光衰减原因简化为大气气溶胶引起的衰减;
36、γ(λ)≈γaerosol(λ)
37、其中,大气气溶胶衰减系数γaerosol(λ)表示为:
38、γaerosol(λ)=σα(λ)+kα(λ)
39、式中,σα(λ)为气溶的散射系数;kα(λ)为气溶的吸收系数;
40、将气溶的散射系数和气溶的吸收系数的作用合并为衰减系数,表述如下:
41、γ(λ)=γhaze(λ)+γfog(λ)+γrain(λ)+γsnow(λ)
42、式中,γhaze(λ)为在波长λ下由于霾引起的消光系数;γfog(λ)为在波长λ下由于雾引起的消光系数;γrain(λ)为在波长λ下由于雨引起的消光系数;γsnow(λ)为在波长λ下由于雪引起的消光系数;
43、12)根据获取的激光雷达的参数利用nvidia optix光线追踪技术进行激光雷达模拟,生成虚拟激光雷达数据;
44、13)接收虚拟激光雷达数据,并且进行解析和可视化,获得虚拟仿真车辆的位姿信息。
45、进一步的,所述步骤三的具体方法如下:
46、31)将虚拟仿真车辆的位姿信息映射到六自由度转台上;
47、32)在六自由度转台上安装imu从而获取真实惯导数据。
48、进一步的,所述虚拟仿真车辆的位姿信息包括俯仰角、横滚角和航向角。
49、第二方面,本发明还提供了一种虚拟仿真场景中主车的运动控制系统,包括:
50、数据生成模块,在虚拟仿真环境中使用optix技术模拟激光雷达的物理运作原理,生成虚拟激光雷达数据;
51、数据转发模块,用于通过ros解析虚拟激光雷达数据,并通过udp发送至车载以太网板卡,再由板卡传输至域控制器即ecu;
52、获取模块,用于通过虚拟激光雷达数据获取虚拟仿真车辆的位姿信息,将车辆的位姿信息传输至六自由度平台,在六自由度平台上装配imu获取虚拟仿真车辆的真实惯导数据,并注入至ecu;
53、第一生成模块,用于将真实的惯性导航数据与虚拟仿真环境中带有实际环境特征的激光雷达数据相融合,并整合虚拟仿真场景中的相机和gnss真实数据,生成虚拟传感器决策感知结果,以支持决策感知任务;
54、第二生成模块,用于在虚拟仿真服务器中即搭载虚拟仿真软件平台即ubuntu系统,通过rosbag数据回放机制,对车辆实际道路收集的数据进行回放;并通过udp通信协议将收集到的实际传感器数据回灌至ecu,以生成来自实际道路采集的决策和感知结果;
55、控制模块,用于将虚拟传感器决策感知结果嵌入到车辆动力学模型中,以控制虚拟仿真场景中主车的运动;
56、评估模块,用于进行激光雷达数据级和决策算法感知级之间的对比,对虚拟生成的激光雷达数据进行评估。
57、进一步的,所述数据生成模块包括:
58、激光发射器模块,用于模拟激光发射;
59、控制与方向模块,用于精确地控制激光雷达线束的发射方向;
60、电机运动模块,用于实现激光雷达线束360度全向视野;
61、多样性模块,用于模拟不同激光雷达传感器的配置和性能;
62、接收仿真数据模块,用于接收激光雷达的仿真数据并且进行解析和可视化;
63、进一步的,所述激光发射模块包括:
64、线束数模拟模块,用于模拟各种激光雷达型号;
65、测距适应性模块,用于设置不同的测距范围;
66、雨雪折射模块,用于在光线追踪中模拟雨滴或雪花对光线的折射影响。
67、进一步的,所述控制与方向模块能够根据需要调整线束的扫描范围。
68、本发明的有益效果为:
69、1)本发明不仅能够降低开发成本,还有助于在安全的环境中对算法性能和安全性进行全面评估,以满足严格的智能网联汽车系统标准;
70、2)本发明通过六自由度平台和真实激光雷达数据回灌作为ground truth的真实标签,不断修正虚拟仿真场景中虚拟激光雷达点云数据的真实性,使其尽可能接近真实激光雷达点云数据的效果;
71、3)本发明采用ros机器人系统,以实现双重数据注入策略,可以将实际传感器注数据所输出的决策算法作为真值,来评价虚拟激光雷达数据所输出的决策算法效果。
- 还没有人留言评论。精彩留言会获得点赞!