用于输电直线塔绝缘子定点的无人机航线规划方法及系统与流程
本技术涉及输电直线塔绝缘子定点,尤其涉及一种用于输电直线塔绝缘子定点的无人机航线规划方法及系统。
背景技术:
1、电力杆塔和绝缘子是电力输送系统的重要组成部分,定期的杆塔绝缘子检查有助于防止电力系统故障,从而减少火灾和电力中断的风险,此外,提前发现问题并进行维修还有助于减少能源浪费和环境污染。无人机可以搭载高分辨率摄像头和传感器,以收集电力杆塔和绝缘子详细的图像和数据,通过使用无人机进行定期的视觉巡检,可以帮助电力公司及时检测到潜在的故障、损坏或劣化情况,以减少停电风险和提高电力系统的可靠性。
2、目前存在的无人机拍摄线路杆塔绝缘子技术主要依赖于专业无人机飞手的人工经验和专业知识,无人机操作需要受过培训和有经验的人员,以确保安全和有效的操作。操作员需要了解飞行法规、设备操作、应急情况处理以及电力专业等相关知识,对飞手水平要求较高。因此,这种方法存在主观性强、自动化水平低、工作效率差等问题,人工巡检技术越来越难以适应电网快速发展的趋势。
3、因此,亟需一种用于输电直线塔绝缘子定点的无人机航线规划方法及系统,解决上述问题。
技术实现思路
1、针对现有技术的上述不足,本技术提供一种用于输电直线塔绝缘子定点的无人机航线规划方法及系统,以解决现有的无人机拍摄线路杆塔绝缘子技术主要依赖于专业无人机飞手的人工经验和专业知识,存在主观性强、自动化水平低、工作效率差等问题。
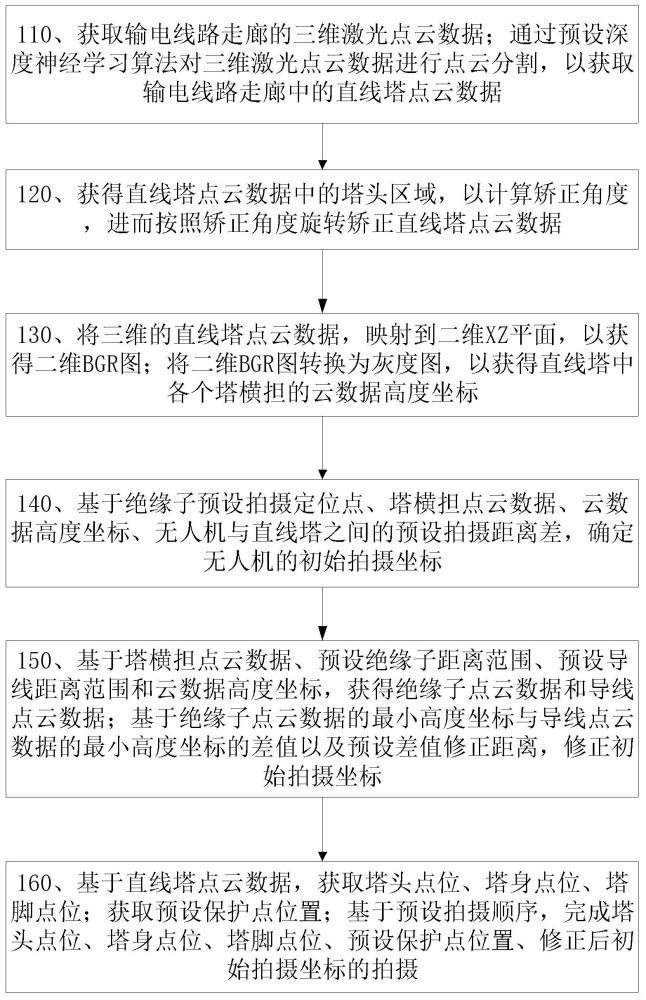
2、第一方面,本技术提供了一种用于输电直线塔绝缘子定点的无人机航线规划方法,方法包括:获取输电线路走廊的三维激光点云数据;通过预设深度神经学习算法对三维激光点云数据进行点云分割,以获取输电线路走廊中的直线塔点云数据;其中,直线塔点云数据包括塔横担点云数据;获得直线塔点云数据中的塔头区域,以计算矫正角度,进而按照矫正角度旋转矫正直线塔点云数据;将三维的直线塔点云数据,映射到二维xz平面,以获得二维bgr图;其中,x为长度坐标、z为高度坐标;将二维bgr图转换为灰度图,以获得直线塔中各个塔横担的云数据高度坐标;基于绝缘子预设拍摄定位点、塔横担点云数据、云数据高度坐标、无人机与直线塔之间的预设拍摄距离差,确定无人机的初始拍摄坐标;基于塔横担点云数据、预设绝缘子距离范围、预设导线距离范围和云数据高度坐标,获得绝缘子点云数据和导线点云数据;基于绝缘子点云数据的最小高度坐标与导线点云数据的最小高度坐标的差值以及预设差值修正距离,修正初始拍摄坐标;基于直线塔点云数据,获取塔头点位、塔身点位、塔脚点位;获取预设保护点位置;基于预设拍摄顺序,完成塔头点位、塔身点位、塔脚点位、预设保护点位置、修正后初始拍摄坐标的拍摄。
3、进一步地,直线塔点云数据为xyz三维数据;其中,x为长度坐标、y为宽度坐标、z为高度坐标;获得直线塔点云数据中的塔头区域,以计算矫正角度,具体包括:基于直线塔点云数据的颜色分布,从直线塔点云数据的顶部采集预设矩形区域作为塔头区域;获取塔头区域的最大外接矩形边框,进而获得八个顶点;从八个顶点中获取同一高度的四个顶点;从四个顶点中获取x最小值对应的第一坐标和y最小值对应的第二坐标,获得第一坐标到第二坐标的直线;从同一高度处的x轴任取一点h(x,0),计算获得h与直线的角度,以作为矫正角度。
4、进一步地,将二维bgr图转换为灰度图,以获得灰度图直线塔中各个塔横担的云数据高度坐标,具体包括:将二维bgr图转换为灰度图,记录灰度图每一行中的塔横担像素点数;基于预设塔横担数量,从灰度图中截取出塔横担对应的子灰度图;基于子灰度图中的像素信息,获得塔横担对应的像素高度坐标;基于预设灰度图与云数据之间的映射关系、像素高度坐标,获得各个塔横担的云数据高度坐标。
5、进一步地,预设拍摄定位点包括绝缘子与横担交点处、绝缘子中心位置处、绝缘子与导线交点处;预设拍摄距离差包括第一距离、第二距离和第三距离;初始拍摄坐标分为绝缘子与横担交点处的初始拍摄坐标、绝缘子中心位置处的初始拍摄坐标、绝缘子与导线交点处的初始拍摄坐标;基于绝缘子预设拍摄定位点、塔横担点云数据、云数据高度坐标、无人机与直线塔之间的预设拍摄距离差,确定无人机的初始拍摄坐标,具体包括:基于塔横担点云数据,划分为若干塔横担;其中,塔横担与云数据高度坐标一一对应;基于塔横担与塔横担点云数据的对应关系,确定塔横担点云数据对应的云数据高度坐标;s1、计算塔横担左侧的初始拍摄坐标:s11:获取各个塔横担的塔横担点云数据的最小长度坐标值对应的最小宽度值和最大宽度值,以获得最小宽度值和最大宽度值之间的中间点;确定中间点对应的位置为绝缘子与塔横担交点位置;s12:确定绝缘子与塔横担交点位置的长度坐标值减预设第一距离为绝缘子与横担交点处的初始拍摄坐标;s13:确定绝缘子与塔横担交点位置的长度坐标值减预设第一距离且高度坐标值减预设第二距离为绝缘子中心位置处的初始拍摄坐标;s14:确定绝缘子与塔横担交点位置的长度坐标值减预设第一距离且高度坐标值减预设第三距离为绝缘子与导线交点处的初始拍摄坐标;s2、计算塔横担右侧的初始拍摄坐标:s21:将步骤s11中的最小长度坐标值修改为最大长度坐标,作为步骤s21;s22:将步骤s12中减预设第一距离,修改为加预设第一距离,作为步骤s22;s23:步骤s13中的减预设第一距离、减预设第二距离,修改为加预设第一距离、加预设第二距离,作为步骤s23;s24:步骤s13中的减预设第一距离、减预设第三距离,修改为加预设第一距离、加预设第三距离,作为步骤s24;根据s1和s2,获得全部的初始拍摄坐标。
6、进一步地,预设绝缘子距离范围包括第一长度范围、第一宽度范围和第一高度范围;预设导线距离范围包括第二长度范围、第二宽度范围和第二高度范围;基于塔横担点云数据、预设绝缘子距离范围、预设导线距离范围和云数据高度坐标,获得绝缘子点云数据和导线点云数据,具体包括:基于塔横担点云数据和云数据高度坐标,获得绝缘子与塔横担交点位置;基于交点位置的交点长度坐标、交点宽度坐标、交点高度坐标、预设绝缘子距离范围,获得绝缘子点云数据;其中,绝缘子点云数据的长度坐标为交点长度坐标±第一长度范围中的任一值、绝缘子点云数据的宽度坐标为交点宽度坐标±第一宽度范围中的任一值、绝缘子点云数据的高度坐标为交点高度坐标±第一高度范围中的任一值;基于交点位置的交点长度坐标、交点宽度坐标、交点高度坐标、预设导线距离范围,获得导线点云数据;其中,导线点云数据的长度坐标为交点长度坐标±第二长度范围中的任一值、导线点云数据的宽度坐标为交点宽度坐标±第二宽度范围中的任一值、导线点云数据的高度坐标为交点高度坐标±第二高度范围中的任一值。
7、进一步地,预设拍摄定位点包括绝缘子与横担交点处、绝缘子中心位置处、绝缘子与导线交点处;初始拍摄坐标分为绝缘子与横担交点处的初始拍摄坐标、绝缘子中心位置处的初始拍摄坐标、绝缘子与导线交点处的初始拍摄坐标;基于绝缘子点云数据的最小高度坐标与导线点云数据的最小高度坐标的差值以及预设差值修正距离,修正初始拍摄坐标,具体包括:在差值小于预设差值修正距离时,将左侧绝缘子中心位置处的初始拍摄坐标的长度坐标减去预设差值修正距离;将右侧绝缘子中心位置处的初始拍摄坐标的长度坐标加上预设差值修正距离;将左侧绝缘子与导线交点处的初始拍摄坐标长度坐标减去预设差值修正距离;将右侧绝缘子与导线交点处的初始拍摄坐标的长度坐标加上预设差值修正距离;在差值大于等于预设差值修正距离时,将左侧绝缘子与导线交点处的初始拍摄坐标长度坐标减去预设差值修正距离;将右侧绝缘子与导线交点处的初始拍摄坐标的长度坐标加上预设差值修正距离;绝缘子与横担交点处的初始拍摄坐标不变。
8、进一步地,基于直线塔点云数据,获取塔头点位、塔身点位、塔脚点位,具体包括:获得直线塔点云数据的最小长度坐标、最小宽度坐标、最大高度坐标;确定(最小长度坐标-2m,最小宽度坐标-2m,最大高度坐标+5m)为塔头点位;确定(最小长度坐标-2m,最小宽度坐标-2m,最大高度坐标+4m)为塔身点位;确定(最小长度坐标-2m,最小宽度坐标-2m,最大高度坐标+3m)为塔脚点位。
9、进一步地,预设保护点位置包括第一保护点位置、第二保护点位置和结束点位置;预设拍摄顺序具体为:塔头点位,到塔身点位,到塔脚点位,到第一保护点位置,到左侧修正后初始拍摄坐标,到第二保护点位置,到右侧修正后初始拍摄坐标,到结束点位置。
10、进一步地,获取输电线路走廊的三维激光点云数据,具体包括:利用无人机搭载激光扫描设备,在输电线路走廊按预设高度水平自主巡视,得到输电线路走廊的三维激光点云数据。
11、第二方面,本技术提供了一种用于输电直线塔绝缘子定点的无人机航线规划系统,系统包括:获取模块,用于获取输电线路走廊的三维激光点云数据;通过预设深度神经学习算法对三维激光点云数据进行点云分割,以获取输电线路走廊中的直线塔点云数据;其中,直线塔点云数据包括塔横担点云数据;矫正模块,用于获得直线塔点云数据中的塔头区域,以计算矫正角度,进而按照矫正角度旋转矫正直线塔点云数据;获得模块,用于将三维的直线塔点云数据,映射到二维xz平面,以获得二维bgr图;其中,x为长度坐标、z为高度坐标;将二维bgr图转换为灰度图,以获得直线塔中各个塔横担的云数据高度坐标;确定模块,用于基于绝缘子预设拍摄定位点、塔横担点云数据、云数据高度坐标、无人机与直线塔之间的预设拍摄距离差,确定无人机的初始拍摄坐标;修正模块,用于基于塔横担点云数据、预设绝缘子距离范围、预设导线距离范围和云数据高度坐标,获得绝缘子点云数据和导线点云数据;基于绝缘子点云数据的最小高度坐标与导线点云数据的最小高度坐标的差值以及预设差值修正距离,修正初始拍摄坐标;拍摄模块,用于基于直线塔点云数据,获取塔头点位、塔身点位、塔脚点位;获取预设保护点位置;基于预设拍摄顺序,完成塔头点位、塔身点位、塔脚点位、预设保护点位置、修正后初始拍摄坐标的拍摄。
12、本领域技术人员能够理解的是,本技术至少具有如下有益效果:
13、本技术公开了一种用于输电直线塔绝缘子定点的无人机航线规划方法及系统,通过获取输电线路走廊的三维激光点云数据,利用预设深度神经学习算法对三维激光点云数据进行点云分割,获取输电走廊中的直线塔点云数据;由于采集三维激光点云数据时,存在飞行角度偏差,进而三维激光点云数据也存在角度偏差,通过计算矫正角度,实现了三维激光点云数据的角度矫正;本技术利用塔横担,获得了初始拍摄坐标;基于绝缘子与塔横担存在的预设位置关系,获得绝缘子点云数据和导线点云数据,修正了初始拍摄坐,最终生成无人机自动定位航线,实现直线塔塔头、塔身、塔脚和塔体所载绝缘子的拍摄。
14、本发明节约了人力成本,改进了自动化水平低的问题,使用深度学习和点云识别的方法提供了自动化的直线塔检测航线的生成,节省了大量的人力资源。解决了现有的无人机拍摄线路杆塔绝缘子技术主要依赖于专业无人机飞手的人工经验和专业知识,存在主观性强、自动化水平低、工作效率差等问题。
- 还没有人留言评论。精彩留言会获得点赞!