锁定结构、操纵装置、操纵模式切换方法以及飞行器与流程
本发明涉及飞行操纵系统领域,特别涉及一种锁定结构、操纵装置、操纵模式切换方法以及飞行器。
背景技术:
1、在自动飞行模式中,民用飞机通常将被动侧杆、脚蹬组件等操纵装置锁定在初始位置,防止飞行员意外操纵。飞行员可通过开关控制锁定装置的通电状态实现操纵装置的锁定与未锁定;也可在操纵装置上施加大于锁定力的操纵力,实现操纵装置的超控。
2、一般在自动驾驶工作时锁定操纵装置,通过锁定装置对操纵装置锁定就位并给与操纵装置对外界所施加的操纵力的锁定力,驾驶员对操纵装置的无意触碰不会解除自动驾驶操作。但是,将锁定力设置一个阈值,驾驶员对操纵的操纵力高于所述阈值,驾驶员所施加的力将使操纵装置脱开锁定装置,系统从自动驾驶操作切换回人工控制。
3、在现有技术当中,通常将锁定组件中被锁定件设置在与操纵手柄直连的输出轴上,当驾驶人员对操纵手柄的操纵力大于锁定力时,被锁定件与锁定件立刻相分离,而导致操纵手柄从初始状态到超控瞬间之间倾斜的超控角度极小。然而,小角度的超控角度会导致驾驶人员在超控过程中的操纵感不佳,由自动驾驶操作至超控操作的过渡感差,且小角度的超控角度让操纵装置在无意触碰下更易进入超控而解除自动驾驶操作。
技术实现思路
1、本发明的实施例提供一种锁定结构、操纵装置、操纵模式切换方法以及飞行器,以增大操纵装置进入超控时的超控角度。
2、为了解决上述技术问题,本发明的实施例公开了如下技术方案:
3、一方面,提供了一种锁定结构,包括:
4、旋转组件;
5、摇臂组件,其具有上摇臂和下摇臂,所述上摇臂与所述下摇臂相传动连接;
6、弹性组件,其设置在所述下摇臂上,所述弹性组件具有弹性件;
7、驱动件,所述驱动件包括与所述下摇臂相传动连接的伸缩杆,所述伸缩杆位移的同时驱动所述上摇臂朝所述旋转组件方向位移;
8、锁定组件,其包括锁定件与被锁定件,所述锁定件设置在所述上摇臂上,所述被锁定件设置在所述旋转组件上;
9、其中,当所述锁定件位移至与所述被锁定件的连接位置时,所述旋转组件被锁定;在所述被锁定件发生转动的情况下,所述锁定件受所述被锁定件传动而转动,且所述被锁定件与所述锁定件发生相对位移;转动过程中所述弹性件发生弹性形变以对所述旋转组件产生锁定力,直至所述锁定件与所述被锁定件相分离。
10、除了上述公开的一个或多个特征之外,或者作为替代,所述旋转组件具有相交且相互垂直的轴线l1和轴线l2,旋转组件绕所述轴线l1或所述轴线l2旋转;所述旋转组件包括绕轴线l1旋转的外旋筒以及绕轴线l2旋转的内旋筒,所述内旋筒可绕所述轴线l2旋转地容设在所述外旋筒内;
11、所述被锁定件设置在所述内旋筒上。
12、除了上述公开的一个或多个特征之外,或者作为替代,所述弹性组件还包括:
13、弹簧筒,弹簧筒内部具有容置腔,顶杆可滑动的设置在所述容置腔内,顶杆与所述弹簧筒通过所述弹性件相连接,当所述顶杆受力抵压位移时所述弹性件发生弹性形变。
14、除了上述公开的一个或多个特征之外,或者作为替代,所述弹性组件还包括:扭簧,所述扭簧的两端分别与所述上摇臂和所述下摇臂相连接。
15、除了上述公开的一个或多个特征之外,或者作为替代,所述驱动件包括电磁铁,所述电磁铁驱动所述伸缩杆伸出或缩回,在所述伸缩杆保持伸出状态时所述电磁铁对所述伸缩杆施加驱动力。
16、除了上述公开的一个或多个特征之外,或者作为替代,所述外旋筒套接在所述内旋筒外周;
17、所述外旋筒与所述内旋筒间套设有轴承,所述轴承的内圈和外圈分别与所述内旋筒和所述外旋筒相固定连接;或,所述外旋筒与所述内旋筒间具有环形的滚珠槽,若干滚子可滚动地容设于所述滚珠槽内。
18、除了上述公开的一个或多个特征之外,或者作为替代,所述锁定件具有对应在所述旋转组件被锁定的情况下的第一位置,以及对应在所述锁定件与所述被锁定件相分离的情况下的第二位置;
19、在所述锁定件在所述第一位置的情况下,所述锁定件与所述被锁定件凹凸配合,以固定所述被锁定件的位置;
20、在所述锁定件在所述第二位置的情况下,所述锁定件与所述被锁定件分离。
21、除了上述公开的一个或多个特征之外,或者作为替代,所述被锁定件包括锁定槽,所述锁定槽的截面为弧形;
22、所述锁定件可滚动地容设在所述锁定槽内,所述锁定件包括可绕自身轴心旋转的滚轮或绕自身球心旋转的球体。
23、除了上述公开的一个或多个特征之外,或者作为替代,所述锁定槽的弧形弯折的曲率由槽底至两侧槽沿逐渐减小。
24、除了上述公开的一个或多个特征之外,或者作为替代,一对所述被锁定件对称地设置在内旋筒轴线水平方向的两侧;
25、一对所述锁定件分别设置在一对上摇臂上,所述一对上摇臂与所述下摇臂相驱动连接。
26、除了上述公开的一个或多个特征之外,或者作为替代,所述弹性件的弹性力的方向与所述下摇臂的旋转方向相同。
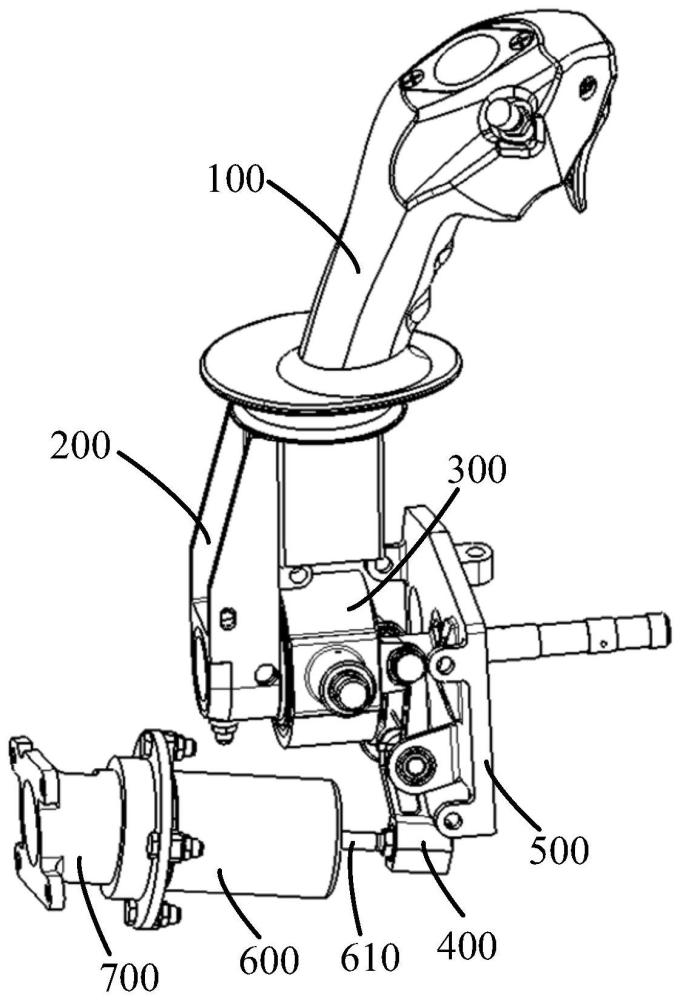
27、另一方面,进一步公开了一种操纵装置,除了上述公开的一个或多个特征之外,或者作为替代,所述操纵装置包括如上述任一项所述的锁定结构;
28、所述旋转组件、所述锁定组件、所述摇臂组件、所述弹性组件以及所述驱动件均容设在壳体;
29、所述操纵装置还包括操纵手柄,所述操纵手柄与所述旋转组件传动连接,所述操纵手柄从所述壳体外露出。
30、除了上述公开的一个或多个特征之外,或者作为替代,所述操纵手柄通过连接件与旋转组件相固定连接,所述旋转组件具有相交且相互垂直的轴线l1和轴线l2;所述连接件沿所述轴线l2方向延伸出纵向轴;所述旋转组件朝所述轴线l1方向延伸出横向轴;所述纵向轴和所述横向轴上设有传感器以感应所述纵向轴和所述横向轴旋转的位姿信息。
31、另一方面,进一步公开了一种操纵模式切换方法,包括以下步骤:驱动件驱动伸缩杆经摇臂组件传动使安装在所述摇臂组件上的锁定件平移连接到与被锁定件连接位置,所述被锁定件安装在与操纵手柄相连的旋转组件上,所述驱动件固定所述伸缩杆将所述锁定件保持在与所述被锁定件连接的位置以固定所述操纵手柄,操纵装置进入锁定状态;
32、通过对所述操纵手柄施加操纵力经所述旋转组件使所述摇臂组件与所述伸缩杆之间的弹性件发生弹性形变,进而所述摇臂组件的角度发生偏转,强制所述锁定件从与所述被锁定件连接位置脱离,操纵装置进入超控状态以使所述操纵手柄自由转动;
33、当所述驱动件不对所述伸缩杆产生驱动力且不对操纵手柄施加操纵力时,所述弹性件驱动所述伸缩杆缩回,所述摇臂组件复位,在扭簧的扭转力作用下所述锁定件远离所述被锁定件。
34、除了上述公开的一个或多个特征之外,或者作为替代,所述弹性件设置在弹簧筒中,所述弹簧筒设置在所述摇臂组件靠近所述驱动件的端部,操纵力使伸缩杆压迫弹簧筒中的弹簧压缩,进而使摇臂组件角度发生偏转。
35、除了上述公开的一个或多个特征之外,或者作为替代,所述摇臂组件包括与旋转轴相旋转连接的上摇臂和下摇臂,所述上摇臂和所述下摇臂间还设有扭簧,所述操纵手柄施加操纵力经所述旋转组件使所述摇臂组件角度发生偏转,偏转过程中所述扭簧受力扭转以使得所述上摇臂与所述下摇臂之间的角度发生偏转。
36、除了上述公开的一个或多个特征之外,或者作为替代,所述锁定件包括锁定槽,所述被锁定件包括滚轮,所述滚轮在与被锁定件连接位置中时与所述锁定槽相啮合。
37、另一方面,进一步公开了一种飞行器,除了上述公开的一个或多个特征之外,或者作为替代,所述操纵装置包括如上述任一项所述的锁定结构。
38、上述技术方案中的一个技术方案具有如下优点或有益效果:本技术采用被锁定件与锁定件可绕各自的旋转轴发生旋转且解锁路径部分重合的技术方案,以使得被锁定件与锁定件两者发生相对位移进而脱出解锁的过程之前,提供了被锁定件与锁定件在解锁过程中具有各自在移动过程中具有相对几近静止的运动状态,在该运动状态中操纵手柄也随之发生一定的角度倾斜,上述的运动状态为操纵手柄的超控提供了更大的超控角度,避免小角度的超控角度让操纵装置在无意触碰下更易进入超控而解除自动驾驶操作,使飞行器的操作状态的改变更加安全的取决于驾驶人员的主观意向。且在上述的运动状态伴随着驾驶人员对操纵手柄的操纵力的逐渐提升,在该过程中操纵力的逐渐增加伴随着操纵手柄的倾斜角逐渐变大,本技术对驾驶人员操纵力的施加具有更加的反馈感,并使驾驶人员在进入超控操作中具有较好的过渡感,提高驾驶人员的操纵感。
- 还没有人留言评论。精彩留言会获得点赞!