一种控制电路和控制方法与流程
本技术实施例涉及自动控制,尤其涉及一种控制电路和控制方法。
背景技术:
1、机械设备在投入使用之前,可以按照机械安全标准进行设备风险评估,以确定机械设备的风险等级及所对应的性能等级(performance level,pl),之后,可以在机械设备中部署相匹配性能等级的安全部件。
2、自主移动机器人(autonomous mobile robot,amr)(本技术下文简称为“机器人”)被广泛应用于各个领域,例如智能仓储领域。机器人的控制中包括安全停止(stop)控制。机器人的stop分为以下三类:
3、stop类型0:直接断电并机械抱闸;
4、stop类型1:电子制动机器停止下来(过程有速度监控),然后断电并机械抱闸;
5、stop类型2:电子制动机器停止下来,速度零静止监控,如果超过阈值,断电并机械抱闸。
6、针对stop类型1,机器人端通过部署安全控制器等对机器人进行安全保护控制。但,在机器人端部署安全控制器成本较高。而且,机器人的性能等级例如是第一等级,而安全控制器等控制部件的性能等级例如是第二等级,导致对机器人的安全保护效果存在影响。
技术实现思路
1、本技术实施例提供了一种控制电路和控制方法,通过信号转换电路、延时电路、模式选择电路和监测电路,提供与机器人的性能等级同等级的安全保护控制机构,不仅能够为机器人提供相匹配的性能等级的控制,且能够降低成本。具体地,本技术实施例公开了以下技术方案:
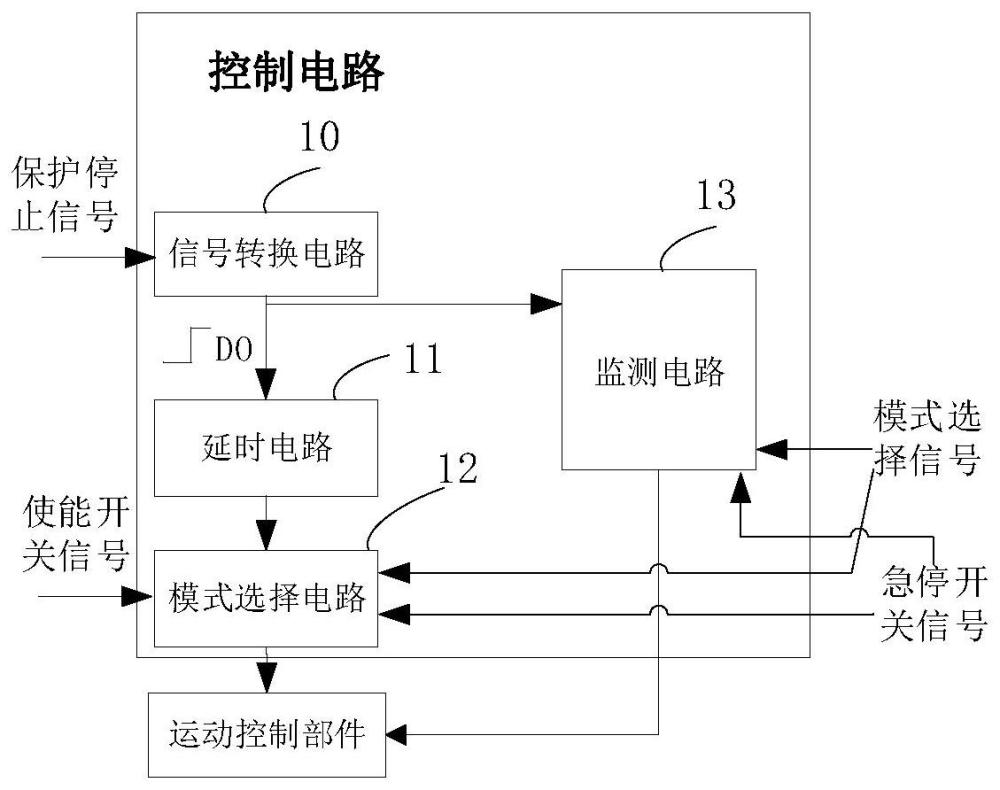
2、第一方面,本技术实施例提供一种控制电路,用于对机器人执行安全保护控制,所述控制电路包括:信号转换电路、延时电路、模式选择电路、监测电路;所述信号转换电路是安全性能等级的电路,所述目标安全性能等级是所述机器人的安全性能等级;其中,
3、所述信号转换电路,用于将输入的保护停止信号转换为符合所述安全性能等级的初始安全信号,以及将所述初始安全信号输出到所述延时电路;所述初始安全信号包括第一电平信号和第二电平信号;所述第一电平信号用于维持机器人的正常运行;所述第二电平信号用于触发对所述机器人的安全停止;
4、所述延时电路,用于将所述第一电平信号直接传送到模式选择电路,以及将所述第二电平信号延时预设延时时长后传送至所述模式选择电路;
5、所述模式选择电路,用于在根据输入的模式选择信号选择自动模式的情况下,对所述延时电路输出的信号、机器人的急停开关信号和使能开关信号,进行逻辑与处理;在所述延时电路输出所述第二电平信号或所述急停开关信号为所述第二电平信号的情况下,输出安全停止信号到所述机器人的运动控制部件,以触发所述运动控制部件控制所述机器人实现安全停止;
6、所述监测电路,用于监测所述初始保护停止信号、所述模式选择信号和所述急停开关信号,以及在所述初始保护停止信号为所述第二电平信号的情况下,将监测结果传送给机器人控制器,以使所述机器人控制器触发所述运动控制部件控制所述机器人实现安全停止。
7、结合第一方面,在第一方面的一种可能的实现方式中,所述延时电路包括第一延时电路和第二延时电路;
8、所述信号转换电路,用于将所述初始安全信号分别输出到所述第一延时电路和所述第二延时电路;
9、其中,所述信号转换电路输出到所述第一延时电路的所述初始安全信号为第一初始安全信号;所述信号转换电路输出到所述第二延时电路的所述初始安全信号为第二初始安全信号。
10、结合第一方面,在第一方面的一种可能的实现方式中,所述控制电路还包括手动操作器信号接口,所述手动操作器信号接口用于接收模式选择信号;
11、所述模式选择电路,用于响应于所述模式选择信号,将所述控制电路的控制模式切换为所述手动模式;
12、所述模式选择电路,还用于在所述手动模式下,响应所述使能开关信号,将所述控制电路的控制模式切换为所述自动模式。
13、结合第一方面,在第一方面的一种可能的实现方式中,所述模式选择电路包括第一模式选择电路和第二模式选择电路,其中,
14、所述第一延时电路,用于将所述第一初始安全信号的所述第一电平信号分别输出至所述第一模式选择电路和所述第二模式选择电路,以及将所述第一初始安全信号的所述第二电平信号按照所述预设延时时长延时后,分别输出至所述第一模式选择电路和所述第二模式选择电路;
15、所述第二延时电路,用于将所述第二初始安全信号的所述第一电平信号分别输出至所述第一模式选择电路和所述第二模式选择电路,以及将所述第二初始安全信号的所述第二电平信号按照所述预设延时时长延时后,分别输出至所述第一模式选择电路和所述第二模式选择电路。
16、结合第一方面,在第一方面的一种可能的实现方式中,在所述第一模式选择电路选择自动模式的情况下,所述第一延时电路输出与所述机器人的第一路急停开关输入、第二延时电路输出串联,用于使所述第一延时电路延时后的信号,与所述第一路急停开关信号、第二延时电路延时后的信号进行逻辑与运算,并向所述运动控制部件输出逻辑与运算后的信号;在所述第一模式选择电路选择手动模式的情况下,所述第一延时电路输出被旁路,持续向所述运动控制部件输出所述第一电平信号;
17、在所述第二模式选择电路选择自动模式的情况下,所述第二延时电路输出与所述机器人的第二路急停开关输入、第一延时电路输出串联,用于使所述第二延时电路延时后的信号,与所述第二路急停开关信号、第一延时电路延时后的信号进行逻辑与运算,并向所述运动控制部件输出逻辑与运算后的信号;在所述第二模式选择电路选择手动模式的情况下,所述第二延时电路输出被旁路,持续向所述运动控制部件输出所述第一电平信号。
18、结合第一方面,在第一方面的一种可能的实现方式中,所述机器人的运动控制部件包括第一驱动电路、第二驱动电路、第一马达和第二马达;其中,
19、所述第一驱动电路用于响应所述第一电平信号,维持所述第一马达的运转,以维持所述机器人的正常运行;所述第二驱动电路用于响应所述第一电平信号,维持所述第二马达的运转,以维持所述机器人的正常运行;
20、所述第一驱动电路,还用于响应延时后的所述第二电平信号,触发对所述第一马达的安全转矩关断,并触发对所述第一马达的机械抱闸制动,以触发所述机器人实现安全停止;
21、所述第二驱动电路,还用于响应延时后的所述第二电平信号,触发对所述第二马达的安全转矩关断,并触发对所述第二马达的机械抱闸制动,以触发所述机器人实现安全停止。
22、结合第一方面,在第一方面的一种可能的实现方式中,所述第一电平信号是高电平信号;所述第二电平信号是低电平信号。
23、第二方面,本技术实施例提供一种控制方法,用于控制电路,所述方法包括:
24、将输入的保护停止信号转换为符合目标安全性能等级的初始安全信号;所述目标安全性能等级是被控机器人的安全性能等级,所述初始安全信号包括第一电平信号和第二电平信号;
25、在所述控制电路处于自动模式下,对所述初始安全信号进行处理,所述处理包括:在所述初始安全信号是所述第二电平信号的情况下,按照预设延时时长对所述第二电平信号进行延时;
26、将所述处理后的信号、机器人的急停开关信号和使能开关信号,进行逻辑与处理;
27、根据逻辑与处理后的结果控制所述机器人的行为。
28、本技术实施例提供的控制电路包括信号转换电路、延时电路、模式选择电路、监测电路。其中,信号转换电路,用于将输入的保护停止信号转换为符合所述安全性能等级的初始安全信号,所述初始安全信号的第一电平信号用于维持机器人的正常运行,第二电平信号用于触发对所述机器人的安全停止,从而可以提供与机器人的性能等级同等级的安全信号。将所述初始安全信号输出到所述延时电路,延时电路用于将所述第一电平信号直接传送到模式选择电路,以及将所述第二电平信号延时预设延时时长后传送至所述模式选择电路。而所述模式选择电路,用于在根据输入的模式选择信号选择自动模式的情况下,对所述延时电路输出的信号、机器人的急停开关信号和使能开关信号,进行逻辑与处理;在所述延时电路输出所述第二电平信号或所述急停开关信号为所述第二电平信号的情况下,输出安全停止信号到所述机器人的运动控制部件,以触发所述运动控制部件控制所述机器人实现安全停止。且所述监测电路,用于监测所述初始保护停止信号、所述模式选择信号和所述急停开关信号,以及在所述初始保护停止信号为所述第二电平信号的情况下,将监测结果传送给机器人控制器,以使所述机器人控制器向所述运动控制部件控制所述机器人实现安全停止。可见,本技术方案,采用符合目标安全性能等级的电路代替现有技术中的安全控制器与其他器件组成的安全控制组件,有利于降低成本,且能够为机器人提供相匹配性能等级(即目标性能等级)的控制。
- 还没有人留言评论。精彩留言会获得点赞!