旋转动力设备控制方法、装置、计算机设备和存储介质与流程
本技术涉及设备智能控制,特别是涉及一种旋转动力设备控制方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着工程技术的快速发展,机械结构智能化运动在现有的家电设备、工业设备等整机设备运行中应用广泛,而整机运动的核心部件常为旋转动力设备,例如齿轮传动结构。整机通常需要旋转动力设备定位转动,来执行特定的功能。
2、为了在整机上集成多种应用功能,旋转动力设备大多需要进行多工位定位,以帮助旋转动力设备定位转动到目标工位,使整机可以执行相应目标功能的效果。而传统技术中,旋转动力设备的工位定位容易由于定位不准确的原因,导致整机运行故障概率增加,降低了整机运行效率。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高旋转动力设备工位定位准确度,降低整机运行故障概率,提高整机运行效率的旋转动力设备控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种旋转动力设备控制方法,所述方法包括:
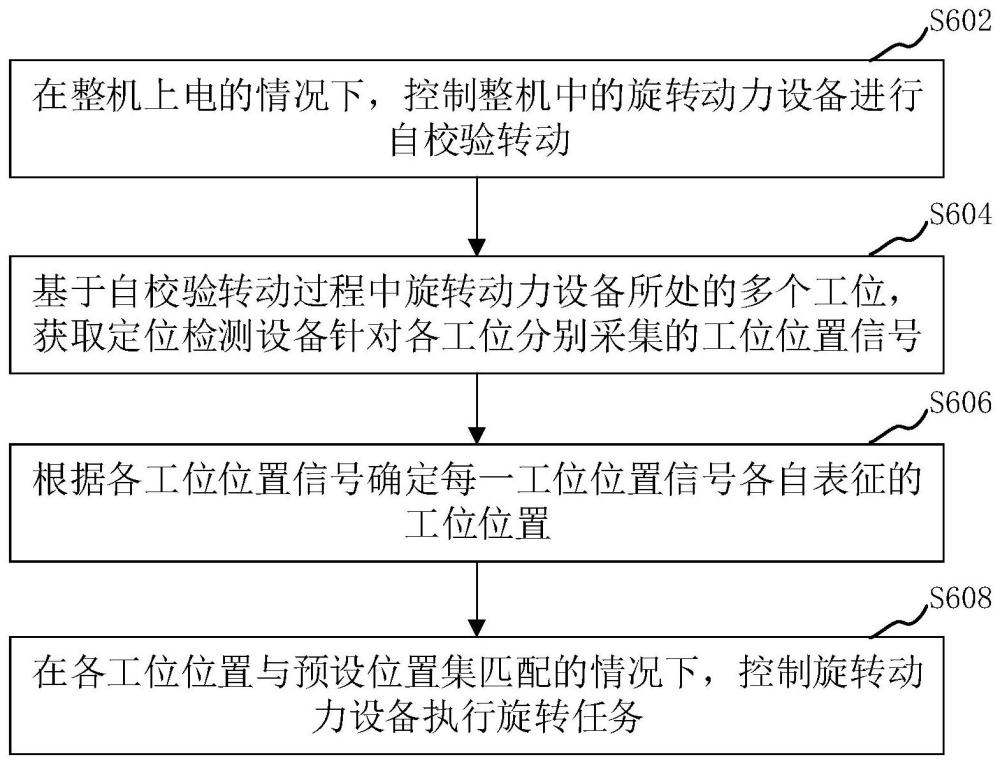
3、在整机上电的情况下,控制所述整机中的旋转动力设备进行自校验转动;
4、基于自校验转动过程中所述旋转动力设备所处的多个工位,获取定位检测设备针对各所述工位分别采集的工位位置信号;
5、根据各所述工位位置信号确定每一工位位置信号各自表征的工位位置;
6、在各所述工位位置与预设位置集匹配的情况下,控制所述旋转动力设备执行旋转任务;所述预设位置集包括多个预设工位位置。
7、在其中一个实施例中,所述根据各所述工位位置信号确定每一工位位置信号各自表征的工位位置,包括:
8、根据预设标定信号识别规则,从各所述工位位置信号中确定标定工位的标定位置信号;
9、基于所述标定位置信号以及各所述工位位置信号的检测时序信息,从预设位置特征数据集中确定各所述工位位置信号对应的位置特征匹配数据;
10、根据各所述工位位置信号对应的位置特征匹配数据,对各所述工位位置信号进行位置匹配,确定每一工位位置信号各自表征的工位位置。
11、在其中一个实施例中,所述根据各所述工位位置信号确定每一工位位置信号各自表征的工位位置,包括:
12、根据各所述工位位置信号和有效信号识别规则,确定各所述工位位置信号中有效信号的信号数量;
13、在所述有效信号的信号数量与预设工位数量值匹配时,根据各所述工位位置信号确定每一工位位置信号各自表征的工位位置。
14、在其中一个实施例中,所述控制所述旋转动力设备执行旋转任务,包括:
15、获取待执行的旋转任务的目标工位;
16、在所述目标工位与所述旋转动力设备当前所处的初始工位不匹配的情况下,基于所述旋转动力设备当前所处的初始工位,以及所述目标工位,确定所述旋转任务的目标旋转方向;
17、根据所述目标旋转方向控制所述旋转动力设备执行所述旋转任务。
18、在其中一个实施例中,所述基于所述旋转动力设备当前所处的初始工位,以及所述目标工位,确定所述旋转任务的目标旋转方向,包括:
19、获取各所述工位的设置距离数据;
20、基于各所述工位的设置距离数据,确定所述旋转动力设备从正驱方向旋转至所述目标工位的正向路径数据,以及所述旋转动力设备从反驱方向旋转至所述目标工位的反向路径数据;所述正驱方向与所述反驱方向的旋转方向相反;
21、根据所述正向路径数据和所述反向路径数据,确定旋转路径最短的旋转方向确定为所述旋转任务的目标旋转方向。
22、在其中一个实施例中,所述方法还包括:
23、在所述有效信号的信号数量与所述预设工位数量值不匹配,或,各所述工位位置与所述预设位置集不匹配的情况下,根据各所述工位位置信号,以及预设故障检测规则,确定所述旋转动力设备的定位故障类型。
24、在其中一个实施例中,所述定位故障类型包括内因故障;
25、所述根据各所述工位位置信号,以及预设故障检测规则,确定所述旋转动力设备的定位故障类型,包括:
26、根据预设扰动检测规则,对各所述工位位置信号进行扰动检测;
27、在确定各所述工位位置信号均不存在信号扰动的情况下,确定所述旋转动力设备的定位故障类型为内因故障。
28、在其中一个实施例中,所述定位故障类型还包括存在外因故障;
29、所述根据各所述工位位置信号,以及预设故障检测规则,确定所述旋转动力设备的定位故障类型,还包括:
30、在确定任意一个工位位置信号存在信号扰动的情况下,确定所述旋转动力设备的定位故障类型为存在外因故障。
31、在其中一个实施例中,所述方法还包括:
32、响应于关机指令,控制所述整机中的旋转动力设备进行自校验转动;
33、基于自校验转动过程中所述旋转动力设备所处的多个工位,获取所述定位检测设备针对各所述工位分别采集的工位位置信号;
34、根据各所述工位位置信号确定每一工位位置信号各自表征的工位位置;
35、在各所述工位位置与预设位置集匹配的情况下,控制所述整机断电。
36、第二方面,本技术还提供了一种旋转动力设备控制装置,所述装置包括:
37、自校验转动控制模块,用于在整机上电的情况下,控制所述整机中的旋转动力设备进行自校验转动;
38、信号采集模块,用于基于自校验转动过程中所述旋转动力设备所处的多个工位,获取定位检测设备针对各所述工位分别采集的工位位置信号;
39、工位确定模块,用于根据各所述工位位置信号确定每一工位位置信号各自表征的工位位置;
40、任务执行控制模块,用于在各所述工位位置与预设位置集匹配的情况下,控制所述旋转动力设备执行旋转任务;所述预设位置集包括多个预设工位位置。
41、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法的步骤。
42、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
43、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的方法的步骤。
44、上述旋转动力设备控制方法、装置、计算机设备、存储介质和计算机程序产品,整机上电后,在控制整机中的旋转动力设备执行旋转任务前,先控制旋转动力设备进行自校验转动,对旋转动力设备进行上电自校验,基于自校验转动过程中旋转动力设备所处的多个工位,获取定位检测设备针对各工位分别采集的工位位置信号,确定每一工位位置信号各自表征的工位位置,将各工位位置与包括有多个预设工位位置的预设位置集进行匹配,在匹配成功的情况下,说明旋转动力设备旋转运行时的定位检测准确,控制旋转动力设备执行旋转任务。通过在执行旋转任务前对旋转动力设备进行上电自校验,能够有效提高旋转动力设备工位定位的准确性,降低整机运行故障概率,进而提升整机运行效率。
- 还没有人留言评论。精彩留言会获得点赞!