航天器的轨道维持控制方法、装置、电子设备及存储介质与流程
本技术涉及航天,尤其涉及一种航天器的轨道维持控制方法、装置、电子设备及存储介质。
背景技术:
1、月球是人类在外太空的一个主要探索对象,与地球不同,月球没有大气、不会有耗散力作用于环月飞行的航天器上,所以航天器的环月轨道半长轴基本保持不变。
2、但受月球非球型引力场模型复杂性的影响,航天器环月低轨轨道的偏心率演化剧烈,如高度100km的环月圆轨道,4圈左右(约8h)偏心率会从0.0变为0.002,如若不进行轨道维持,则轨道偏心率将持续增大,最终导致航天器陨落到月球表面。因此,月球低轨航天器需要经常进行轨道维持,使偏心率保持在一定范围内,以满足航天器的飞行任务需求和飞行安全需求,但频繁的轨道维持会影响航天器的飞行状态,给航天器测控工作也带来巨大压力。
3、因此,如何合理地进行轨道维持控制是亟待解决的技术问题。
技术实现思路
1、本技术实施例提供一种航天器的轨道维持控制方法、装置、电子设备及存储介质,用以对航天器的轨道合理地进行维持控制。
2、第一方面,本技术实施例提供一种航天器的轨道维持控制方法,包括:
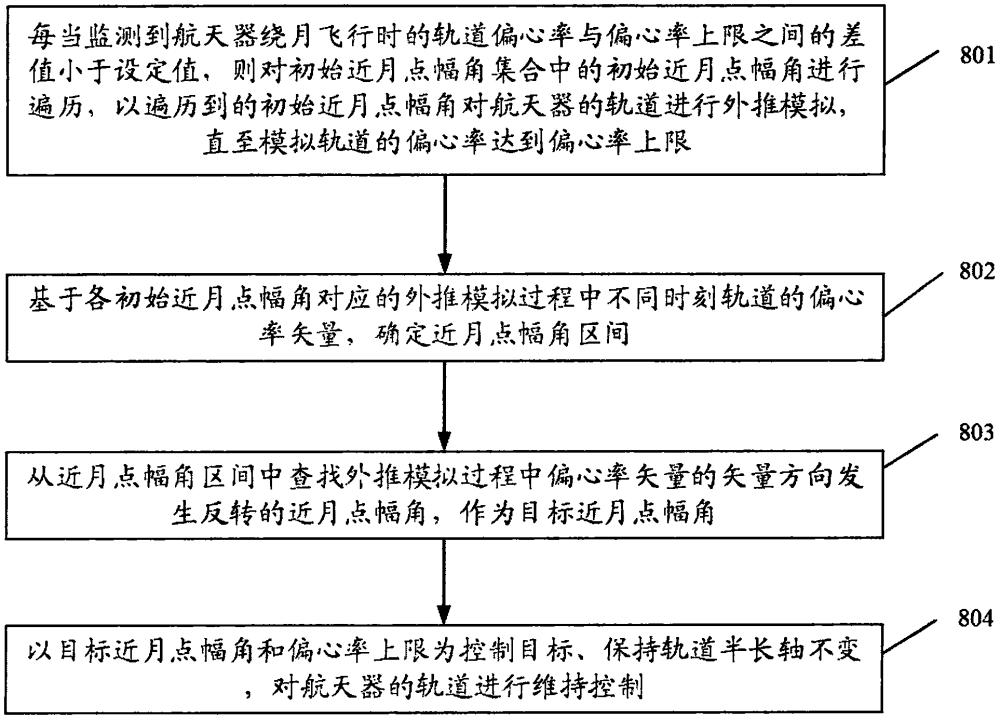
3、每当监测到航天器绕月飞行时的轨道偏心率与偏心率上限之间的差值小于设定值,则对初始近月点幅角集合中的初始近月点幅角进行遍历,以遍历到的初始近月点幅角对所述航天器的轨道进行外推模拟,直至模拟轨道的偏心率达到所述偏心率上限;
4、基于各初始近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,确定近月点幅角区间;
5、从所述近月点幅角区间中查找外推模拟过程中偏心率矢量的矢量方向发生反转的近月点幅角,作为目标近月点幅角,其中,偏心率矢量的矢量方向发生反转表示轨道的偏心率维持小于所述偏心率上限的时间最长;
6、以所述目标近月点幅角和所述偏心率上限为控制目标、保持轨道半长轴不变,对所述航天器的轨道进行维持控制。
7、在一些实施例中,基于各初始近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,确定近月点幅角区间,包括:
8、基于每个初始近月点幅角对应的外推模拟过程中近月点幅角的变化情况,分析偏心率矢量的矢量方向是否存在反转可能;
9、若存在,则将所述初始近月点幅角作为参考近月点幅角;
10、基于各参考近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,确定近月点幅角区间。
11、在一些实施例中,基于每个初始近月点幅角对应的外推模拟过程中近月点幅角的变化情况,分析偏心率矢量的矢量方向是否存在反转可能,包括:
12、确定所述初始近月点幅角与本次外推模拟结束时轨道对应的近月点幅角之间角度差的绝对值;
13、若所述角度差的绝对值位于预设范围内,则确定偏心率矢量的矢量方向存在反转可能;
14、若所述角度差的绝对值不位于所述预设范围内,则确定偏心率矢量的矢量方向不存在反转可能。
15、在一些实施例中,基于各参考近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,确定近月点幅角区间,包括:
16、利用每个参考近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,对偏心率矢量随时间的变化曲线进行线性拟合,得到第一直线;
17、从各第一直线的纵截距中,选择纵截距的最小正数和纵截距的最大负数,其中,纵截距的绝对值与轨道的偏心率维持小于所述偏心率上限的维持时间负相关;
18、以所述纵截距的最小正数和所述纵截距的最大负数对应的两个参考近月点幅角,作为近月点幅角区间的区间端点。
19、在一些实施例中,从所述近月点幅角区间中查找外推模拟过程中偏心率矢量的矢量方向发生反转的近月点幅角,作为目标近月点幅角,包括:
20、以所述近月点幅角区间的中间近月点幅角为新的初始近月点幅角,对所述航天器的轨道外推过程进行模拟,直至模拟轨道的偏心率达到所述偏心率上限;
21、利用外推模拟过程中所述中间近月点幅角对应的不同时刻轨道的偏心率矢量,对偏心率矢量随时间的变化曲线进行线性拟合,得到第二直线;
22、基于所述第二直线的纵截距,分析外推模拟过程中偏心率矢量的矢量方向是否发生反转,其中,纵截距的绝对值与轨道的偏心率维持小于所述偏心率上限的维持时间负相关;
23、若否,则缩小所述近月点幅角区间,执行以所述近月点幅角区间的中间近月点幅角为新的初始近月点幅角,对所述航天器的轨道外推过程进行模拟,直至模拟轨道的偏心率达到所述偏心率上限的步骤;
24、若是,则将所述中间近月点幅角确定为所述目标近月点幅角。
25、在一些实施例中,基于所述第二直线的纵截距,分析外推模拟过程中偏心率矢量的矢量方向是否发生反转,包括:
26、若所述第二直线的纵截距的绝对值小于预设值,则确定外推模拟过程中偏心率矢量的矢量方向发生反转;
27、若所述第二直线的纵截距的绝对值不小于所述预设值,则确定外推模拟过程中偏心率矢量的矢量方向未发生反转。
28、在一些实施例中,缩小所述近月点幅角区间,包括:
29、若所达第二直线的纵截距为正数,则将所述近月点幅角区间的区间上限更新为所述中间近月点幅角;
30、若所述第二直线的纵截距为负数,则将所述近月点幅角区间的区间下限更新为所述中间近月点幅角。
31、第二方面,本技术实施例提供一种航天器的轨道维持控制装置,包括:
32、外推模拟模块,用于每当监测到航天器绕月飞行时的轨道偏心率与偏心率上限之间的差值小于设定值,则对初始近月点幅角集合中的初始近月点幅角进行遍历,以遍历到的初始近月点幅角对所述航天器的轨道进行外推模拟,直至模拟轨道的偏心率达到所述偏心率上限;
33、区间确定模块,用于基于各初始近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,确定近月点幅角区间;
34、幅角确定模块,用于从所述近月点幅角区间中查找外推模拟过程中偏心率矢量的矢量方向发生反转的近月点幅角,作为目标近月点幅角,其中,偏心率矢量的矢量方向发生反转表示轨道的偏心率维持小于所述偏心率上限的时间最长;
35、控制模块,用于以所述目标近月点幅角和所述偏心率上限为控制目标、保持轨道半长轴不变,对所述航天器的轨道进行维持控制。
36、在一些实施例中,还包括:
37、分析模块,用于基于每个初始近月点幅角对应的外推模拟过程中近月点幅角的变化情况,分析偏心率矢量的矢量方向是否存在反转可能;
38、所述区间确定模块,具体用于基于各参考近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,确定近月点幅角区间。
39、在一些实施例中,分析模块具体用于:
40、确定所述初始近月点幅角与本次外推模拟结束时轨道对应的近月点幅角之间角度差的绝对值;
41、若所述角度差的绝对值位于预设范围内,则确定偏心率矢量的矢量方向存在反转可能;
42、若所述角度差的绝对值不位于所述预设范围内,则确定偏心率矢量的矢量方向不存在反转可能,
43、在一些实施例中,所述区间确定模块具体用于:
44、利用每个参考近月点幅角对应的外推模拟过程中不同时刻轨道的偏心率矢量,对偏心率矢量随时间的变化曲线进行线性拟合,得到第一直线;
45、从各第一直线的纵截距中,选择纵截距的最小正数和纵截距的最大负数,其中,纵截距的绝对值与轨道的偏心率维持小于所述偏心率上限的维持时间负相关;
46、以所述纵截距的最小正数和所述纵截距的最大负数对应的两个参考近月点幅角,作为近月点幅角区间的区间端点。
47、在一些实施例中,所述幅角确定模块具体用于:
48、以所述近月点幅角区间的中间近月点幅角为新的初始近月点幅角,对所述航天器的轨道外推过程进行模拟,直至模拟轨道的偏心率达到所述偏心率上限;
49、利用外推模拟过程中所述中间近月点幅角对应的不同时刻轨道的偏心率矢量,对偏心率矢量随时间的变化曲线进行线性拟合,得到第二直线;
50、基于所述第二直线的纵截距,分析外推模拟过程中偏心率矢量的矢量方向是否发生反转,其中,纵截距的绝对值与轨道的偏心率维持小于所述偏心率上限的维持时间负相关;
51、若否,则缩小所述近月点幅角区间,执行以所述近月点幅角区间的中间近月点幅角为新的初始近月点幅角,对所述航天器的轨道外推过程进行模拟,直至模拟轨道的偏心率达到所述偏心率上限的步骤;
52、若是,则将所述中间近月点幅角确定为所述目标近月点幅角。
53、在一些实施例中,所述幅角确定模块具体用于:
54、若所述第二直线的纵截距的绝对值小于预设值,则确定外推模拟过程中偏心率矢量的矢量方向发生反转;
55、若所述第二直线的纵截距的绝对值不小于所述预设值,则确定外推模拟过程中偏心率矢量的矢量方向未发生反转。
56、在一些实施例中,所述幅角确定模块具体用于:
57、若所述第二直线的纵截距为正数,则将所述近月点幅角区间的区间上限更新为所述中间近月点幅角;
58、若所述第二直线的纵截距为负数,则将所述近月点幅角区间的区间下限更新为所述中间近月点幅角。
59、第三方面,本技术实施例提供一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中:
60、存储器存储有可被至少一个处理器执行的计算机程序,该计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述航天器的轨道维持控制方法。
61、第四方面,本技术实施例提供一种存储介质,当所述存储介质中的计算机程序由电子设备的处理器执行时,所述电子设备能够执行上述航天器的轨道维持控制方法。
62、本技术实施例中,每当监测到航天器绕月飞行时的轨道偏心率与偏心率上限之间的差值小于设定值,则对初始近月点幅角集合中的初始近月点幅角进行遍历,以遍历到的初始近月点幅角对航天器的轨道进行外推模拟,直至模拟轨道的偏心率达到偏心率上限,然后,基于各初始近月点幅角对应的不同时刻轨道的偏心率矢量,确定近月点幅角区间,再从近月点幅角区间中查找外推模拟过程中偏心率矢量的矢量方向发生反转的近月点幅角,作为目标近月点幅角,以目标近月点幅角和偏心率上限为控制目标、保持轨道半长轴不变,维持控制航天器的轨道,其中,偏心率矢量的矢量方向发生反转表示轨道的偏心率维持小于偏心率上限的时间最长。这样,以偏心率矢量的矢量方向发生反转的近月点幅角为目标近月点幅角进行轨道维持控制,不但可维持航天器的轨道,而且可保证每次控制后轨道的偏心率维持小于偏心率上限的时间比较长,降低轨道维持控制频率,因此,对航天器的轨道维持控制方式更合理。
- 还没有人留言评论。精彩留言会获得点赞!