一种用于光电吊舱的快速电子校轴控制方法及控制系统与流程
本申请涉及自动控制的领域,尤其是涉及一种用于光电吊舱的快速电子校轴控制方法及控制系统。
背景技术:
1、在光电吊舱执行任务中,随着机目距离的变化,目标在视频中的像素占比实时变化。为了获得良好的观察效果和实现对目标的长时稳定跟踪,需要视情切换光学传感器和调节视场,便于图像处理单元精准捕获目标。为了保证打击精度,需要将瞄准线中心与激光光斑中心调重合,即需要进行电子校轴,才能实现“瞄哪儿打哪儿”。
2、现有的光电吊舱的电子校轴控制方法主要有两种:
3、方法一:只在连续变焦电视和连续变焦红外的最小视场进行电子校轴。该方法限制了操作人员只能在最小视场进行激光照射引导。
4、方法二:在连续变焦电视和连续变焦红外的每个视场依次进行电子校轴。该方法虽然弥补了方法一中的短板,但是操作繁琐,以连续变焦电视和连续变焦红外都为20倍光学变焦为例,该方法需要进行40次电子校轴才能保证在全视场范围的激光照射引导,耗时耗力,大幅提升了电子校轴的成本。
技术实现思路
1、有鉴于此,本申请提供一种用于光电吊舱的快速电子校轴控制方法及控制系统,解决了现有技术中的问题,实现光电吊舱的快速校轴,省时省力,大幅降低电子校轴的成本。
2、一方面,本申请提供的一种用于光电吊舱的快速电子校轴控制方法采用如下的技术方案:
3、一种用于光电吊舱的快速电子校轴控制方法,包括:
4、步骤一:在连续变焦电视的最小视场,控制光电吊舱瞄准任一目标t1;
5、步骤二:控制光电吊舱激光测距机,对目标t1进行激光照射;
6、步骤三:通过光电吊舱图像处理单元识别出激光光斑中心位置,;
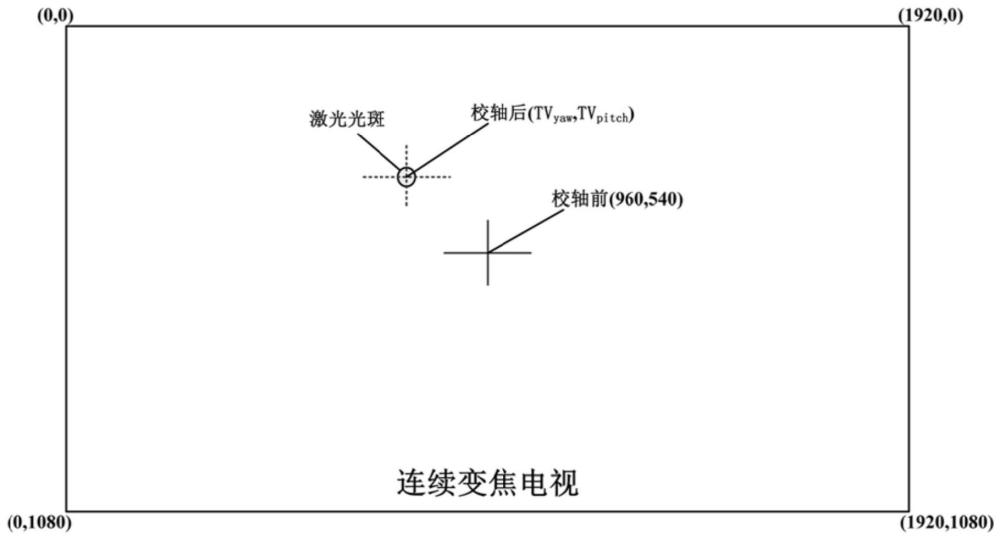
7、步骤四:通过光电吊舱图像处理单元将连续变焦电视最小视场的瞄准线中心坐标(x,y)调校至与步骤三中的激光光斑中心重合,计算得到连续变焦电视最小视场的电子方位向的校轴量yawtvlong和俯仰向的校轴量pitchtvlong,方位向的校轴量等于x减去步骤三中激光光斑中心在方位向上的坐标,俯仰向的校轴量等于y减去步骤三中激光光斑中心在俯仰向上的坐标,
8、步骤五:以步骤四计算得到的电子校轴量为基准,计算得到连续变焦电视其他视场的方位向的电子校轴量δyawtv和连续变焦电视其他视场的俯仰向的电子校轴量δpitchtv;
9、步骤六:根据步骤五中计算的其他视场的电子校轴量,通过以下公式计算连续变焦电视其他视场的瞄准线中心在方位向上的坐标tvyaw和在俯仰向上的坐标tvpitch,tvyaw=x-δyawtv,tvpitch=y-δpitchtv;
10、步骤七:基于步骤四,在连续变焦电视的最小视场,控制光电吊舱瞄准线中心瞄准任一目标t2;
11、步骤八:控制光电吊舱切换到连续变焦红外的最小视场,通过图像识别出步骤七中的目标t2在连续变焦红外最小视场的位置,坐标记(irt2yaw,irt2pitch);
12、步骤九:光电吊舱图像处理单元通过特征点识别,将连续变焦红外最小视场的瞄准线中心坐标(x,y)调校至与步骤八中的目标t2重合,计算得到连续变焦红外最小视场的电子校轴量(yawirlong,pitchirlong):yawirlong=x-irt2yaw,pitchirlong=y-irt2pitch;
13、步骤十:以步骤九计算得到的电子校轴量(yawirlong,pitchirlong)为基准,计算得到连续变焦红外其他视场的电子校轴量(δyawir,δpitchir);
14、步骤十一:根据步骤十中计算的其他视场的电子校轴量,通过以下公式计算连续变焦红外其他视场的瞄准线中心坐标(iryaw,irpitch):iryaw=x-δyawir,irpitch=y-δpitchir;
15、步骤十二:基于步骤六和步骤十一,图像处理单元存储全光学传感器和全视场的瞄准线中心坐标,实现校轴。
16、所述步骤五和步骤十中最小视场电子校轴量计算方法如下:
17、δyawtv=yawtvlong*ftv/ftv-long;
18、δpitchtv=pitchtvlong*ftv/ftv-long;
19、δyawir=yawirlong*fir/fir-long;
20、δpitchir=pitchirlong*fir/fir-long;
21、其中,ftv为连续变焦电视当前视场的焦距,ftv-long为连续变焦电视最小视场的焦距;fir为连续变焦红外当前视场的焦距,fir-long为连续变焦红外最小视场的焦距。
22、另一方面,本申请提供的一种用于光电吊舱的快速电子校轴控制系统采用如下的技术方案:
23、一种用于光电吊舱的快速电子校轴控制系统,控制系统用于执行上述控制方法,控制系统包括中控系统和光电吊舱;所述中控系统位于地面操控台,用于发出控制命令;所述光电吊舱搭载于飞机上;
24、所述光电吊舱包括光学传感器、图像处理单元、稳定平台和控制器,光学传感器包括连续变焦电视、连续变焦红外和激光测距机,安装于稳定平台上,控制视场切换和对目标进行激光测距;图像处理单元实现图像识别、视频输出、视频切换和字符叠加,控制器实现中控系统指令的分发和完成光电吊舱对目标的搜索、跟踪和定位;图像处理单元完成激光光斑中心和图像特征点的识别、连续变焦电视、连续变焦红外最小视场瞄准线中心的自动校轴、连续变焦电视、连续变焦红外其他视场电子校轴的自动拟合。
25、可选的,连续变焦电视波段包含近红外波段。
26、可选的,图像处理单元为tms320c6657czh片,能够在程序上控制实现所有光学传感器在所有视场电子校轴的自动拟合处理并存储。
27、另一方面,本申请提供的一种用于光电吊舱的快速电子校轴控制系统采用如下的技术方案:
28、一种用于光电吊舱的快速电子校轴控制系统,控制系统处理器、存储器和应用程序,应用程序被存储在所述存储器中并被配置为由所述处理器执行,应用程序配置用于执行上述的控制方法。
29、综上所述,本申请包括以下有益技术效果:
30、本申请的电子校轴控制方法,只需要在光电吊舱连续变焦电视的最小视场完成瞄准线中心与激光光斑中心校轴后,就可自动拟合出连续变焦电视其他视场、连续变焦红外所有视场瞄准线的校轴量,实现光电吊舱的快速校轴,省时省力,大幅降低电子校轴的成本。
技术特征:
1.一种用于光电吊舱的快速电子校轴控制方法,其特征在于,包括:
2.根据权利要求1所述的用于光电吊舱的快速电子校轴控制方法,其特征在于,其特征在于:所述步骤五和步骤十中最小视场电子校轴量计算方法如下:
3.一种用于光电吊舱的快速电子校轴控制系统,其特征在于,控制系统用于执行权利要求1或2中的控制方法,控制系统包括中控系统和光电吊舱;所述中控系统位于地面操控台,用于发出控制命令;所述光电吊舱搭载于飞机上;
4.根据权利要求3所述的用于光电吊舱的快速电子校轴控制系统,其特征在于,连续变焦电视波段包含近红外波段。
5.根据权利要求3所述的用于光电吊舱的快速电子校轴控制系统,其特征在于,图像处理单元为tms320c6657czh片,能够在程序上控制实现所有光学传感器在所有视场电子校轴的自动拟合处理并存储。
6.一种用于光电吊舱的快速电子校轴控制系统,其特征在于,控制系统包括处理器、存储器和应用程序,应用程序被存储在所述存储器中并被配置为由所述处理器执行,应用程序配置用于执行如权利要求1或2的控制方法。
技术总结
本申请提供了一种用于光电吊舱的快速电子校轴控制方法及控制系统,属于自动控制的技术领域,具体的在光电吊舱连续变焦电视最小视场完成电子校轴后,可自动拟合出连续变焦电视其他视场和连续变焦红外所有视场校轴后的瞄准线中心坐标,实现光电吊舱在所有视场的快速校轴,助力无人机在所有视场均可实现对目标的精确打击。具有耗时短、可移植性强和费效比低的优点。
技术研发人员:昝宝亮,韩运峥,刘念,张红洛,梁璐
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!