一种航空发动机条件抗干扰复合控制系统及其方法
本发明属于航空发动机控制领域,涉及一种航空发动机控制方法,尤其涉及一种航空发动机条件抗干扰复合控制系统及其方法,该航空发动机控制方法结合了动态逆方法、条件抗干扰控制方法的优势,考虑了干扰在不同情况下对于控制性能的有利或有害影响,具有各物理意义明确、快速扰动估计与补偿闭环稳定、控制精度高等优点。
背景技术:
1、航空发动机控制系统设计所面临的困难和挑战在于其工作环境的复杂性和自身随工作时间表现出来的性能退化,表现在数学上则为模型具有强耦合、快时变、强非线性和强不确定性。要实现这种系统满足稳定性、快速性、精确性、鲁棒性、可靠性的高性能控制具有较大的挑战性。
2、一方面,航空发动机建模时一定会存在误差,兼以工作环境的多变性和自身的退化,这种误差在某些情况下可能比较显著,这种误差在数学上可以采用集总干扰来描述。若不对集总干扰进行补偿,即不采取任何措施来消除或减小干扰对系统的影响,即使采用最优或鲁棒控制方法,也难以保证系统的动静态性能。实际上,如果没有考虑干扰对于系统动态的影响,则会导致系统的输出与期望值之间存在较大偏差,控制系统的品质也会发生下降,甚至稳定性都得不到保证。
3、另一方面,条件抗干扰控制技术是一种近年来才出现的控制技术,目前在电机、飞行器等领域已有初步研究,但在航空发动机领域,目前尚未有人采用这种方法。实际上,在航空发动机运行过程中,由于飞行高度、速度、姿态等因素的变化,由未建模动态和外部扰动产生的集总扰动对系统控制性能的影响有时候有利有时候有害,采用传统不管集总干扰有利或有害都进行无差别补偿的方式尽管可以得到一种稳定解决方案,但是这种无差别的补偿方式对于航空发动机系统的高性能控制可能会造成损失,主要体现在耗油率和快速性上。
4、因此,针对当前和未来航空发动机控制技术发展所面临的亟待解决的技术问题,本发明旨在提出一种航空发动机条件抗干扰复合控制系统及其方法,充分利用发动机各关键状态的信息,实现对未测量干扰的实时估计和条件补偿,提高控制系统的动静态性能和鲁棒性。
技术实现思路
1、(一)技术问题
2、为解决现有航空发动机控制系统及方法中所存在的上述缺陷和不足,本发明旨在提供一种航空发动机条件抗干扰复合控制系统及其方法,这种控制系统及方法不需要提供精确的数学模型,通过引入基于固定时间的扩充观测器观测集总干扰;设计干扰特征指示器,用于描述集总干扰对航空发动机转速跟踪控制系统的有利或不利影响;进一步基于动态逆方法和干扰特征指示器的输出,设计了条件抗干扰复合控制器。这种思路可以对于系统的干扰的有利作用或有害作用进行了在线分类,既可以克服由模型不确定性和外部干扰带来的不利影响,又能够进一步提高系统的动态性能,具有条件扰动估计与补偿、闭环稳定、控制精度高、不依赖于精确模型等优点,由这种方法得到的闭环系统在理论上是一致有界稳定的,合理选择控制器参数可以有效提高了系统的控制品质。
3、(二)技术方案
4、本发明为实现其发明目的、解决其技术问题,所采用的技术方案为:
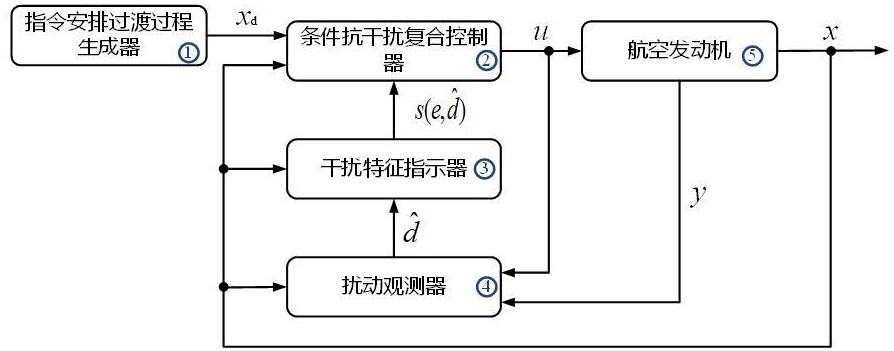
5、本发明的第1个发明目的在于提供一种航空发动机条件抗干扰复合控制系统,所述航空发动机为单轴航空发动机,所述控制系统用以实现对所述单轴航空发动机的转速控制并在逻辑上至少包括一个指令安排过渡过程生成器、一个条件抗干扰复合控制器、一个干扰特征指示器、一个扰动观测器,其特征在于,
6、所述指令安排过渡过程生成器,其输出端与下游的所述条件抗干扰复合控制器的输入端相连接,用于根据指标要求安排指令过渡过程产生给定指令 x d并输出至下游的条件抗干扰复合控制器,以备控制设计使用;
7、所述条件抗干扰复合控制器包括输入端和输出端,其输入端与所述指令安排过渡过程生成器的输出端、干扰特征指示器的输出端及下游的航空发动机的状态反馈输出端相连接,其输出端与下游的航空发动机的控制指令输入端相连接,并基于所述指令安排过渡过程生成器、干扰特征指示器和扰动观测器的输入信息产生输出控制量 u并输出至航空发动机及扰动观测器,实现航空发动机的条件抗干扰复合控制;
8、所述干扰特征指示器包括输入端和输出端,其输入端与所述扰动观测器的输出端及下游的航空发动机的状态反馈输出端相连接,用于输入扰动观测值和表征航空发动机轴转速增量 x的状态反馈值,其输出端与所述条件抗干扰复合控制器的输入端相连接,用于输出干扰特征指示器的补偿输出至条件抗干扰复合控制器;
9、所述扰动观测器包括输入端和输出端,其输入端与所述条件抗干扰复合控制器的输出端及下游的航空发动机相连接,用于输入条件抗干扰复合控制器的输出控制量 u、表征航空发动机轴转速增量 x的状态反馈值及输出量 y,其输出端与所述干扰特征指示器的输入端相连接,用于输出扰动观测值至干扰特征指示器。
10、本发明优选的实例中,对于单轴航空发动机系统,利用其输入输出数据,面型控制设计的需要,通过系统辨识的方法,得到其带扰动的仿射形式非线性数学模型:
11、
12、式中, x表示航空发动机轴转速的增量,为 x关于时间的微分,代表了航空发动机中旋转轴的动态特性, d为观测到的集总干扰, f( x)、 g( x)均为关于 x的非线性函数, y表示航空发动机的系统输出值,此处即为航空发动机轴转速的增量 x, u为航空发动机的系统输入值,此处即为所述条件抗干扰复合控制器的输出控制量。
13、本发明优选的实例中,所述指令安排过渡过程生成器用于产生符合指标要求的动态指令,对于已知给定的参考指令 r d,通过一个传递函数 g( s)的安排过程环节输出给定指令,所述传递函数 g( s)的具体形式为:
14、
15、式中, s表示微分算子, n( s)为分子多项式, d( s)为分母多项式, g( s)取一阶惯性环节、二阶惯性环节或高阶惯性环节。
16、本发明优选的实例中,所述扰动观测器基于固定时间扩充状态干扰观测方法设计,以实现固定时间干扰观测,得到集总干扰,具体为:
17、
18、其中,分别表示、的观测值,,表示对时间的微分, k1~ k6分别表示选定的观测器增益,均大于0,定义符号,且 α>0,由上式可观测到集总干扰,其输出为。
19、本发明优选的实例中,所述干扰特征指示器设计为:
20、
21、式中, e= x- x d为状态跟踪误差,sign(•)为符号函数。
22、本发明优选的实例中,所述条件抗干扰复合控制器基于干扰特征指示器的计算输出和动态逆方法,条件抗干扰复合控制计算实现航空发动机系统的控制,其控制律设计为:
23、
24、上式中, k 11、 k 12>0为条件抗干扰复合控制器的增益系数,表示指令安排过渡过程生成器输出的给定指令对时间的微分。
25、本发明的第2个发明目的在于提供一种航空发动机条件抗干扰复合控制方法,基于上述第1个发明目提供的航空发动机条件抗干扰复合控制系统,其特征在于,所述控制方法在实施时至少包括如下步骤:
26、步骤ss1:面向控制设计的标准模型建立
27、对于单轴航空发动机系统,利用其输入输出数据,面型控制设计的需要,通过系统辨识的方法,得到其带扰动的仿射形式非线性数学模型:
28、
29、式中, x表示航空发动机轴转速的增量,为 x关于时间的微分,代表了航空发动机中旋转轴的动态特性, d为观测到的集总干扰, f( x)、 g( x)均为关于 x的非线性函数, y表示航空发动机的系统输出值,此处即为航空发动机轴转速的增量 x, u为航空发动机的系统输入值,此处即为所述条件抗干扰复合控制器的输出控制量;
30、步骤ss2:指令安排过渡过程
31、用于产生符合指标要求的动态指令,对于已知给定的参考指令 r d,通过一个传递函数 g( s)的安排过程环节输出给定指令 xd,所述传递函数 g( s)的具体形式为:
32、
33、式中, s表示微分算子, n( s)为分子多项式, d( s)为分母多项式, g( s)取一阶惯性环节、二阶惯性环节或高阶惯性环节;
34、步骤ss3:固定时间干扰观测
35、基于固定时间扩充状态干扰观测方法,实现固定时间干扰观测,得到集总干扰,具体为:
36、
37、其中,分别表示 x、 d的观测值,,表示对时间的微分, k1~ k6分别表示选定的观测器增益,均大于0,定义符号,且 α>0,由上式可观测到集总干扰,其输出为;
38、步骤ss4:干扰特征指示器计算
39、干扰特征指示器设计为:
40、
41、式中, e= x- x d为状态跟踪误差,sing(•)为符号函数;
42、步骤ss5:条件抗干扰复合控制计算
43、基于动态逆方法和条件特征指示器的计算输出,条件抗干扰复合控制计算实现航空发动机系统的控制,其控制律设计成如下形式:
44、
45、式中, k 11、 k 12>0为条件抗干扰复合控制器的增益系数,表示指令安排过渡过程生成器的输出对时间的微分;
46、步骤ss6:判断航空发动机是否结束控制,若是,则结束,若否,则跳转到步骤ss2循环执行。
47、本发明优选的实例中,上述步骤ss1中, x表征航空发动机轴转速的增量 δn= n- n e,其中 n为航空发动机的轴转速, n e为航空发动机平衡点的转速,航空发动机的系统输入值 u表征燃油流量的增量 δw f= w f- w fe, w f为航空发动机的燃油流量, w fe为航空发动机的平衡点燃油流量。
48、(三)技术效果
49、同现有技术相比,本发明的航空发动机条件抗干扰复合控制系统及其方法具有下列显著的技术效果:
50、(1)闭环稳定:与无模型控制方法诸如pid相比,本方法能从理论上说明系统的有界稳定性。现有pid控制方法对于非线性、快时变、不确定的航空发动机系统来说,往往难以保证系统的稳定性和鲁棒性。本发明通过引入扰动观测器和干扰特征指示器,能够更准确地描述和补偿航空发动机系统的内部和外部因素,从而保证了系统在理论上是一致有界稳定的。
51、(2)控制精度高:通过对模型不确定性的自适应调节和外部干扰的补偿,本发明提出的方法具有很高的精度。本发明采用了基于固定时间的扩充状态干扰观测器,用于观测各个阶次的集总干扰,并将观测到的干扰估计值输出至特征干扰指示器中用于判断干扰的有益或有害作用,实现了条件集总干扰补偿,提高了系统的动静态性能。
52、(3)不依赖于精确模型:本发明只需要利用航空发动机的输入输出数据,通过系统辨识的方法,构建其带扰动的严反馈数学模型。这样,本发明能够适应航空发动机的高度非线性、强耦合、时变、不确定等特性,以及复杂多变的飞行环境,从而提高了控制系统的自适应性和灵活性。
53、(4)尤为重要的是,本方法的重要创新在于:利用了航空发动机系统中的集总干扰对于跟踪控制的有利作用;提出了干扰特征指示器来描述集总干扰对航空发动机转速跟踪控制系统的有利或不利影响;设计了基于条件抗干扰的复合控制方案,通过从有益干扰中获益并补偿不利干扰,实现航空发动机优越的转速跟踪控制性能。
- 还没有人留言评论。精彩留言会获得点赞!