一种基于迁移学习的ECAS在线控制方法、系统及控制终端与流程
所属的技术人员能够理解,本发明提供的基于迁移学习的ecas在线控制方法各个方面可以实现为系统、方法或程序产品。因此,本公开的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“系统”。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
背景技术:
1、客车/卡车电子控制的空气悬架系统(ecas)由ecas电控单元、电磁阀、高度传感器、气囊等部件组成。高度传感器负责检测车辆高度的变化,电控单元将接受输入信息,判断当前车辆状态,激发电磁阀工作,电磁阀实现对各个气囊的充放气调节。随着人们对车辆乘坐舒适性要求的提高,ecas电控悬架技术的发展,空气悬架在客车/卡车上的应用日益广泛。
2、比如现有技术中,公开了一种电子空气悬架控制方法,该方法包括:获取车辆行进方向前方路面的点云数据;基于所述路面的点云数据获取所述路面的路面特征,所述路面特征包括所述路面的凹凸类型和凹凸程度,根据所述凹凸类型确定所述车辆电子空气悬架的调节方向,根据所述凹凸程度确定所述车辆电子空气悬架的调节高度;基于所述调节方向和所述调节高度,调节所述车辆电子空气悬架。可以看出该文件可以预测车辆前进方向上前方路面的情况,做到在车辆到达凸起或凹陷处时,随着悬架的高度变化同步调整电子空气悬架的高度。
3、在车辆电子空气悬架的控制系统中一般是通过pid控制方法来实现。pid控制方法一旦配置到车辆的电子空气悬架控制系统即为固定模式,后期难以调整,也无法基于车辆运行工况,进行适度调节,有时难以满足车辆使用要求,降低用户驾乘车辆的体验。
技术实现思路
1、本发明提供一种基于迁移学习的ecas在线控制方法,方法采用神经网络在线控制方法,通过参数的实时调整,适应汽车不同运行工况,满足控制要求。
2、方法包括:
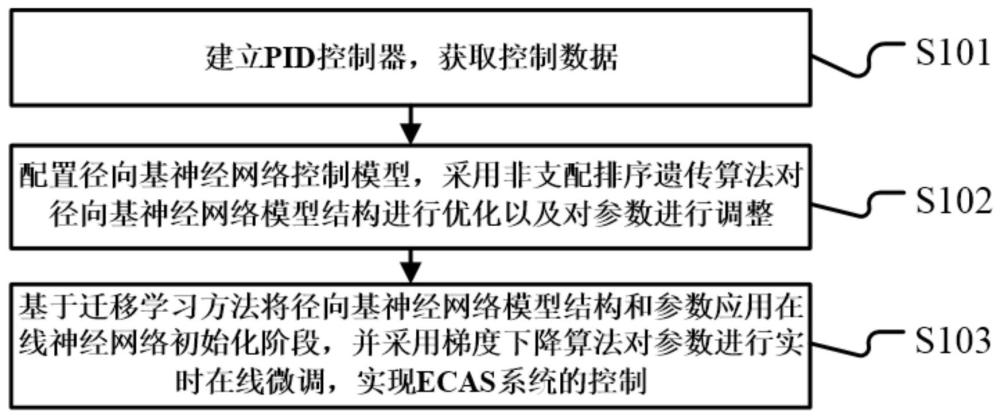
3、s101:建立pid控制器,获取控制数据;
4、s102:配置径向基神经网络控制模型,采用非支配排序遗传算法对径向基神经网络模型结构进行优化以及对参数进行调整;
5、s103:基于迁移学习方法将径向基神经网络模型结构和参数应用在线神经网络初始化阶段,并采用梯度下降算法对参数进行实时在线微调,实现ecas系统的控制。
6、进一步需要说明的是,步骤s101中,pid控制器的表示方式如下:
7、(1)
8、其中,δ u( t)为 t时刻进气阀门开度变化量, kp为比例系数, ki为积分系数, kd为微分系数, e( t)= y*( t)- y( t)为 t时刻控制误差, y*( t)为高度设定值, y( t)为实际高度值。
9、进一步需要说明的是,步骤s101中,采用pid控制器控制ecas系统,并储存控制过程中δ u( t), e( t), y( t)数据。
10、进一步需要说明的是,步骤s102中, t时刻径向基神经网络模型的输出为:
11、(2)
12、其中, j表示隐藏层的第 j个神经元, j∈[1, j], j表示隐藏层神经元的个数,表示 t时刻隐藏层第 j个神经元与输出神经元之间的权重,表示 t时刻隐藏层第 j个神经元的输出。
13、通过如下公式进行输出,
14、(3)
15、其中,表示 t时刻隐藏层第 j个神经元的中心向量,表示神经网络的输入,表示 t时刻第 j个神经元的宽度,表示和之间的欧式距离。
16、 t时刻径向基神经网络模型的输入表示为,
17、(4)
18、其中,δ e( t)= e( t)- e( t-1)为 t时刻的误差变化量。
19、进一步需要说明的是,方法中,采用非支配排序遗传算法对径向基神经网络模型结构和参数进行优化,建立参数集合
20、,优化目标为,
21、(5)
22、其中, f1( t)表示非支配排序遗传算法的第一个优化目标, f2( t)表示非支配排序遗传算法的第二个优化目标;
23、(6)
24、(7)
25、其中,表示输出神经元与隐藏层之间的权重向量, j为隐藏层神经元的个数,||w( t)||表示权重范数, y( t)为神经网络的实际输出, yd( t)为神经网络的期望输出, t表示样本个数。
26、进一步需要说明的是,步骤s103还包括:基于非支配排序遗传算法获得最优的参数集合之后,将参数集合迁移到神经网络在线控制器初始化阶段,并采用梯度下降法对在线控制器的参数进行微调,参数更新规则为,
27、(8)
28、其中,为学习因子, g( t)表示的均方根误差函数。
29、本发明还提供一种基于迁移学习的ecas在线控制系统,系统包括:控制器建立模块、参数优化调整模块以及在线控制模块;
30、控制器建立模块用于向用户提供信息录入的输入装置,并基于预设数据,建立pid控制器,获取控制数据;
31、参数优化调整模块用于配置径向基神经网络控制模型,采用非支配排序遗传算法对径向基神经网络模型结构进行优化以及对参数进行调整;
32、在线控制模块基于迁移学习方法将径向基神经网络模型结构和参数应用在线神经网络初始化阶段,并采用梯度下降算法对参数进行实时在线微调,实现ecas系统的控制。
33、本发明还提供一种控制终端,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,处理器执行所述程序时实现所述基于迁移学习的ecas在线控制方法的步骤。
34、从以上技术方案可以看出,本发明具有以下优点:
35、本发明的提供ecas在线控制方法,先建立pid控制器,获取控制数据;并配置径向基神经网络控制模型,采用非支配排序遗传算法对径向基神经网络模型结构进行优化以及对参数进行调整;进而可以对ecas系统基于不同工况,或用户需求进行控制结构和参数调整。控制结构和参数调整是基于迁移学习方法将径向基神经网络模型结构和参数应用在线神经网络初始化阶段,并采用梯度下降算法对参数进行实时在线微调,实现ecas系统的控制,提高了调整控制的精度和准确,满足车辆的行驶要求,提升用户驾乘体验。
- 还没有人留言评论。精彩留言会获得点赞!