一种增强飞机水面纵向滑行稳定性的控制律设计方法与流程
本发明属于大型灭火水陆两栖飞机电传飞控控制律设计领域,涉及一种增强飞机水面纵向滑行稳定性的控制律设计方法。
背景技术:
1、水上飞机在水面运动时飞机的水动和气动升力、阻力和力矩随速度变化而不断变化,因此,飞机的运动姿态也随着速度在不断的变化。这些变化造成水上飞机在水面起降过程中存在不稳定因素,包括俯仰角过大或过小时导致稳定性下降,甚至发生不稳定运动造成的上不稳定区域。为了改善飞机水面纵向滑行稳定性,传统的设计方法是通过修改飞机的船体外形,经过反复迭代获得满足要求的船体外形设计。船体外形更改,需要完成大量的测试试验和验证周期。在船体外形不更改的情况下,通过控制律设计,增强飞机水面纵向滑行稳定性,从而提高飞机的水面滑行抗干扰能力,减轻飞行员的操纵负担。
技术实现思路
1、发明目的
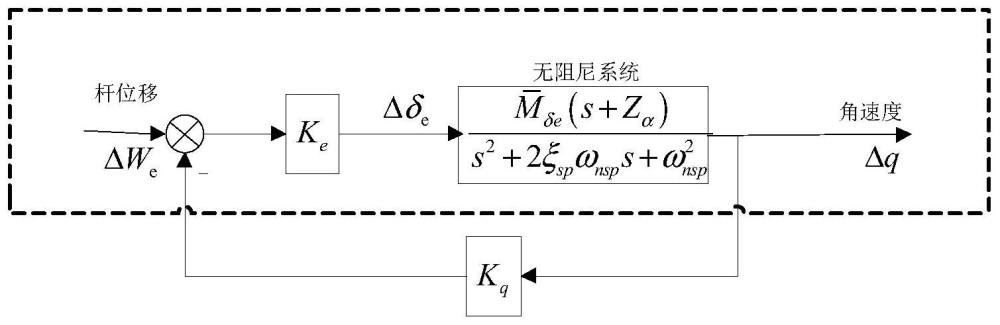
2、当飞机在水面高速滑行时,由于水动力作用,导致飞机的纵向稳定性会有所下降。本技术在更改飞机船体外形设计的前提下,通过电传飞行控制系统,通过引入俯仰角速率q信号,通过一定比例增益kq,反馈叠加到前向操纵指令上,形成增稳系统,提高飞机水面滑行时的纵向稳定性,增强水面滑行抗干扰能力,减轻飞行员的操纵负担。
3、技术方案
4、一种增强飞机水面纵向滑行稳定性的控制律设计方法,包括如下步骤:
5、步骤1:通过反馈俯仰角速度q,形成阻尼反馈通道a。反馈增益kq随校正空速空速变化,即根据实时的校正空速vcas进行插值获得。在低速时反馈增益设置为0,从而防止升降舵舵效较低时频繁发生满偏度作动;
6、步骤2:将俯仰角速率信号通过高通滤波洗出网络,获得俯仰角加速度参数,通过一定比例增益后,进一步限幅,形成阻尼反馈通道b。,从而进一步增强飞机水面滑行时的纵向稳定性。
7、步骤3:通过反馈通道a和通道b叠加后的指令,进行进一步限幅,叠加至前向操纵指令上,形成闭环控制系统。
8、进一步的,所述步骤1中,反馈增益值的设计根据设计经验总结获得,见下表所示。
9、 vcas(km/h) 0 100 130 200 kq 0 0 0.4 0.4
10、。
11、进一步的,所述步骤2中高通滤波具体为s/s+4。
12、进一步的,所述步骤2中限幅量为全权限的5%。
13、进一步的,所述步骤3中限幅量为全权限的30%。
14、进一步的,所述步骤3中限幅量,用于降低俯仰角速率信号错误带来的影响。
15、进一步的,纵向二阶短周期运动模型:
16、
17、上式中符号表示如下所示
18、δα——为飞行迎角;
19、q——为飞机俯仰角速度;
20、——为飞行迎角变化率
21、——为俯仰角加速度
22、δδe——为升降舵偏度
23、参数zα、zδe、为飞机气动力大导数,用于表征飞机的气动力特性。
24、进一步的,由纵向短周期运动的阻尼比计算公式可得:
25、
26、由上式可知,v表示飞行速度。纵向短周期的阻尼比ξsp主要取决于mq。而mq的值正是反映飞机自身俯仰阻尼力矩的值。因此,通过反馈俯仰角速度来增大俯仰阻尼力矩,可以有效提高飞机的纵向阻尼比ξsp。
27、进一步的,无阻尼时的传递函数为
28、
29、进一步的,俯仰阻尼器的控制律(当φ=0时)为
30、
31、进一步的,有阻尼器时的传递函数为
32、
33、进一步的,有阻尼器时的固有频率和阻尼比分别为
34、
35、式中,k=kqke
36、通过比较有无阻尼器的系统传递函数,可得恰当选择k可增大阻尼比,改善飞机的阻尼特性。增加俯仰阻尼后,飞机的静操纵性会有所降低,但由于大型灭火水陆两栖飞机在水面滑行时的操纵性较为充足,故牺牲部分操纵性飞机仍是具有较满意的操纵性。
37、本申请的有益效果在于:
38、本发明逻辑结构简单,在船体外形不更改的情况下,通过控制律设计,由机载传感器测得的俯仰角速率信号,通过反馈增益后叠加到前向控制指令,从而形成增稳系统,可以增强飞机在水面滑行时的纵向稳定性。
技术特征:
1.一种增强飞机水面纵向滑行稳定性的控制律设计方法,其特征在于,包括如下步骤:
2.如权利要求1所述的方法,其特征在于,所述步骤1中,反馈增益值的设计根据设计经验总结获得,见下表所示;
3.如权利要求2所述的方法,其特征在于,所述步骤2中高通滤波具体为s/s+4。
4.如权利要求3所述的方法,其特征在于,所述步骤2中限幅量为全权限的5%。
5.如权利要求4所述的方法,其特征在于,所述步骤3中限幅量为全权限的30%。
6.如权利要求5所述的方法,其特征在于,所述步骤3中限幅量,用于降低俯仰角速率信号错误带来的影响。
7.如权利要求6所述的方法,其特征在于,纵向二阶短周期运动模型:
8.如权利要求7所述的方法,其特征在于,由纵向短周期运动的阻尼比计算公式可得:
技术总结
本发明属于电传飞控控制律设计领域,涉及一种增强飞机水面纵向滑行稳定性的控制律设计方法。通过反馈俯仰角速度q,形成阻尼反馈通道A。反馈增益Kq随校正空速空速变化,即根据实时的校正空速VCAS进行插值获得。在低速时反馈增益设置为0,防止升降舵舵效较低时频繁发生满偏度作动;将俯仰角速率信号通过高通滤波洗出网络,获得俯仰角加速度参数,通过一定比例增益后,进一步限幅,形成阻尼反馈通道B,从而进一步增强飞机水面滑行时的纵向稳定性。通过反馈通道A和通道B叠加后的指令,进行进一步限幅,叠加至前向操纵指令上,形成闭环控制系统。通过反馈增益后叠加到前向控制指令,从而形成增稳系统,可以增强飞机在水面滑行时的纵向稳定性。
技术研发人员:廖海君,李康孛,刘卓
受保护的技术使用者:中航通飞华南飞机工业有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!