一种游船的过桥洞方法、装置、计算机设备和存储介质与流程
本发明涉及游船领域,尤其是一种游船的过桥洞方法、装置、计算机设备和存储介质。
背景技术:
1、游船是一种受欢迎的休闲娱乐方式,通常在河流、湖泊、海洋等水域中进行,随着交通不断的发展,水上桥梁也越来越多,而桥梁的增多无疑给游船的运行带来诸多阻碍。
2、近年来,随着自动驾驶技术的快速发展,水面自动驾驶智能化程度也获得了突飞猛进的发展,多种用途的水面智能驾驶船也在各行各业之中获得广泛的应用。智能驾驶技术的成熟应用也体现了游船智能化技术的快速发展,游船智能化过桥技术则是游船智能化发展的重要体现。当前,户外水面游船的导航方式主要依靠卫星定位导航、惯性导航等。由于桥洞内环境复杂,例如桥洞内的风速和水流速度可能都比开阔水面环境风速和水流要大,对游船运动影响比平静湖面较大,因此桥洞内游船导航至关重要。
技术实现思路
1、本发明要解决的技术问题是提供一种游船的过桥洞方法、装置、计算机设备和存储介质,帮助游船通过桥洞的问题。
2、为解决上述技术问题,本发明提供一种游船的过桥洞方法,包括:
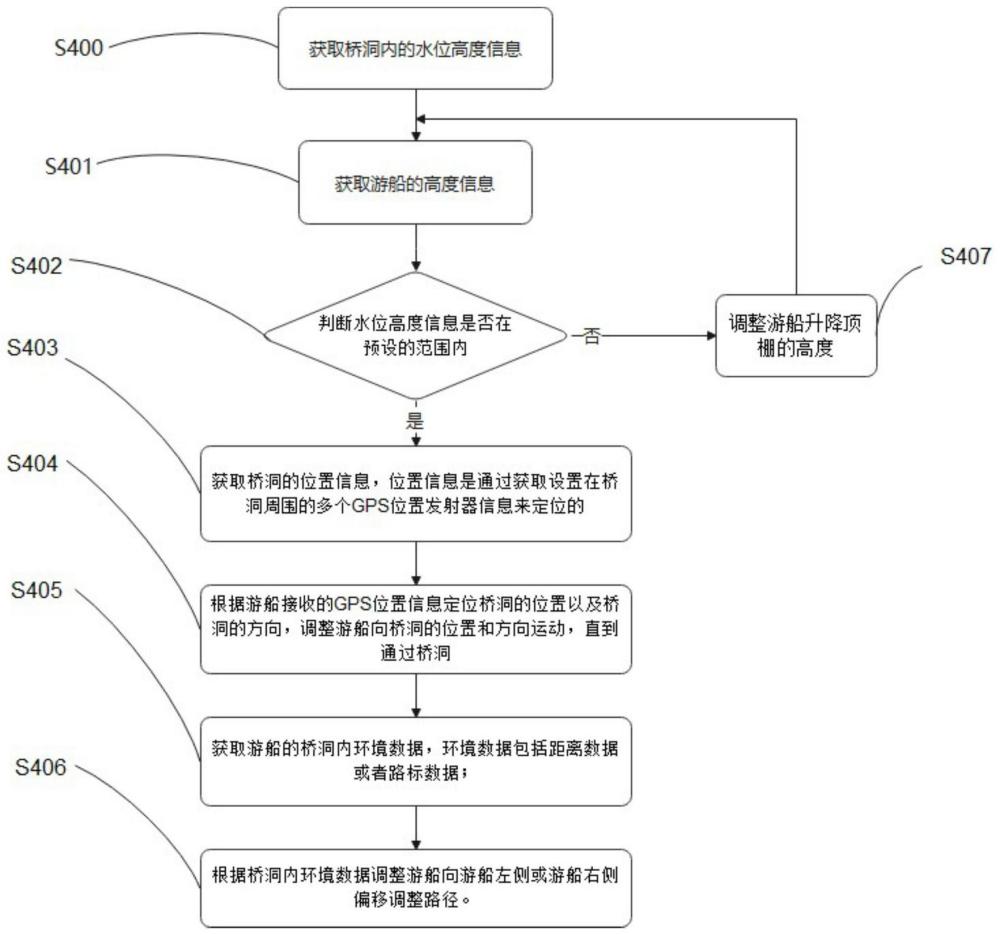
3、获取桥洞内的水位高度信息;
4、获取游船的高度信息;
5、根据获取的水位高度信息计算桥洞内的可通行高度,并判断游船高度是否在桥洞的可通行高度内;
6、在水位高度信息在预设的高度信息范围内的情况下,获取桥洞的位置信息,位置信息是通过获取设置在桥洞周围的多个gps位置发射器信息来定位的;
7、根据游船接收的gps位置信息定位桥洞的位置以及桥洞的方向,调整游船向桥洞的位置和方向运动,直到通过桥洞;
8、获取游船的桥洞内环境数据,环境数据包括距离数据或者人工地标数据;
9、根据桥洞内环境数据调整游船向游船左侧或游船右侧偏移调整路径。
10、优选的,获取游船的桥洞内环境数据,根据桥洞内环境数据调整游船路径包括:
11、获取游船左右两侧到桥洞禁行侧边的水平距离;
12、根据获取到的水平距离,比较游船测量的距离值的大小,然后控制游船向距离较大的一侧运动。
13、优选的,根据获取到的水平距离,比较游船测量的距离值的大小,然后控制游船向距离较大的一侧运动包括:当游船的运动方向与桥洞的方向平行,但不在桥洞对称中间位置时,此时游船分别检测游船到禁行侧边的距离值,并比较两个距离值的大小,然后计算两个距离的平均值,在保持游船最终运动方向不变的情况下,控制游船朝距离值较大的一侧运动,运动的横向距离为最大值与平均值的差值,然后摆正方向盘,当检测到游船左右两侧到禁行侧边距离值相等时,控制摆正方向盘并保持航行方向。
14、优选的,根据获取到的水平距离,并比较游船测量的距离值的大小,然后控制游船向距离较大的一侧运动包括:当游船的运动方向与桥洞的方向有夹角时,游船作用两侧到禁行侧边的距离不行等,游船单侧到禁行侧边的距离也不相等,此时根据游船单侧两个最远点检测到的距离值,根据反三角函数,计算游船与桥洞偏移的夹角,通过控制方向盘按照夹角摆正游船到平行桥洞的方向。
15、优选的,获取游船的桥洞内环境数据,根据桥洞内环境数据调整游船路径包括:获取桥洞内的人工地标信息,并通过视觉传感器识别人工地标的位置,从而调整游船路径。
16、一种游船的过桥洞装置,包括:
17、第一获取模块,用于获取桥洞内的水位高度信息;
18、第二获取模块,用于获取游船的高度信息;
19、判断模块,用于根据获取的水位高度信息计算桥洞内的可通行高度,并判断游船高度是否在桥洞的可通行高度内;
20、第三获取模块,用于获取桥洞的位置信息,位置信息是通过获取设置在桥洞周围的多个gps位置发射器信息来定位的;
21、第一执行模块,用于根据游船接收的gps位置信息定位桥洞的位置以及桥洞的方向,调整游船向桥洞的位置和方向运动,直到通过桥洞;
22、第四获取模块,用于获取游船的桥洞内环境数据,环境数据包括距离数据或者人工地标数据;
23、第二执行模块,用于根据桥洞内环境数据调整游船向游船左侧或游船右侧偏移调整路径。
24、优选的,还包括通讯模块,用于把桥洞水位数据以及gps数据发送给游船控制系统。
25、一种计算机设备,其特征在于,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求1-6中任一项所述的船舶通过桥梁的检测方法。
26、一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时可实现如权利要求1-6中任一项所述的船舶通过桥梁的检测方法。
27、本发明的有益效果是:由于本发明设置了一种用于游船的过桥洞的方法、装置、计算机设备和存储介质,可以为游船通过桥洞提供方法和指导;有由于通过检测桥洞内固定环境的参数,可以克服桥洞内卫星导航的弱点,为游船快速穿过桥洞提供了指导,使得游船过桥更加精准和安全。
技术特征:
1.一种游船的过桥洞方法,其特征在于:方法包括:
2.根据权利要求1所述的游船的过桥洞方法,其特征在于:获取游船的桥洞内环境数据,根据桥洞内环境数据调整游船路径包括:
3.根据权利要求2所述的游船的过桥洞方法,其特征在于:根据获取到的水平距离,比较游船测量的距离值的大小,然后控制游船向距离较大的一侧运动包括:当游船的运动方向与桥洞的方向平行,但不在桥洞对称中间位置时,此时游船分别检测游船到禁行侧边的距离值,并比较两个距离值的大小,然后计算两个距离的平均值,在保持游船最终运动方向不变的情况下,控制游船朝距离值较大的一侧运动,运动的横向距离为最大值与平均值的差值,然后摆正方向盘,当检测到游船左右两侧到禁行侧边距离值相等时,控制摆正方向盘并保持航行方向。
4.根据权利要求2或3所述的游船的过桥洞方法,其特征在于:根据获取到的水平距离,并比较游船测量的距离值的大小,然后控制游船向距离较大的一侧运动包括:当游船的运动方向与桥洞的方向有夹角时,游船作用两侧到禁行侧边的距离不行等,游船单侧到禁行侧边的距离也不相等,此时根据游船单侧两个最远点检测到的距离值,根据反三角函数,计算游船与桥洞偏移的夹角,通过控制方向盘按照夹角摆正游船到平行桥洞的方向。
5.根据权利要求1所述的游船的过桥洞方法,其特征在于:获取游船的桥洞内环境数据,根据桥洞内环境数据调整游船路径包括:获取桥洞内的人工地标信息,并通过视觉传感器识别人工地标的位置,从而调整游船路径。
6.根据权利要求1所述的游船的过桥洞方法,其特征在于:获取桥洞位置信息的方法包括预设游船的进桥点的gps定位信息、游船的出桥点的gps定位信息,gps定位信息包括经度和纬度的信息,在当前的激光雷达坐标系中,计算进桥点的gps与出桥点的gps的位置信息的连线在坐标系中的夹角,从而算出桥洞的方向信息。
7.一种游船的过桥洞装置,其特征在于:包括:
8.一种游船的过桥洞装置,其特征在于:还包括通讯模块,用于把桥洞水位数据以及gps数据发送给游船控制系统。
9.一种计算机设备,其特征在于,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求1-6中任一项所述的船舶通过桥梁的检测方法。
10.一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时可实现如权利要求1-6中任一项所述的船舶通过桥梁的检测方法。
技术总结
本发明提供一种游船的过桥洞方法、装置、计算机设备和存储介质,通过获取桥洞内的水位高度信息,获取游船的高度信息,根据获取的水位高度信息计算桥洞内的可通行高度,获取桥洞的位置信息,根据游船接收的GPS位置信息定位桥洞的位置以及桥洞的方向,调整游船向桥洞的位置和方向运动,直到通过桥洞,获取游船的桥洞内环境数据,环境数据包括距离数据或者人工地标数据,根据桥洞内环境数据调整游船向游船左侧或游船右侧偏移调整路径,由于本发明设置了一种用于游船的过桥洞的方法、装置、计算机设备和存储介质,可以为游船通过桥洞提供方法和指导,也可以克服桥洞内卫星导航的弱点,为游船快速穿过桥洞提供指导,使得游船过桥更加精准和安全。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:青岛无疆技术有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!