配电网数字化运维系统及方法与流程
本发明属于电网控制,具体的,涉及一种配电网数字化运维系统及方法。
背景技术:
1、配电运维工作是指对电力系统中的配电设备进行巡检、维护和修复等一系列操作,保障供电质量和稳定性。随着智能化技术的发展,智能化应用在配电网运维中越来越重要。然而,一些地区在进行配电网的运维工作时,主要还是依靠人工巡检,缺乏对智能化技术的应用,导致运维工作的效率和质量不高,这一方法同时也显著提升了运维工作的人力成本与安全风险。
2、为了提升巡检效率,现有技术中最常用的是利用无人机来进行巡检工作,但是现有技术中通过为各无人机预设固定的巡检路线的方法存在应变能力较差的问题,如无人机未及时进行充电等情况,可能会造成部分线路无法及时巡检的问题,另外,各线路无法均匀的进行划分,这就导致部分无人机飞行路径较长,部分无人机飞行路径较短,进而各无人机的充电周期不同的问题,为了解决上述问题,本发明提供了以下技术方案。
技术实现思路
1、本发明的目的在于提供一种配电网数字化运维系统及方法,解决现有技术中通过为各无人机预设固定的巡检路线的方法存在应变能力较差、各无人机的利用不均匀的问题。
2、本发明的目的可以通过以下技术方案实现:
3、配电网数字化运维方法,包括如下步骤:
4、s1、根据配电网分布信息将配电网分布区域划分为若干个巡检区域;
5、s2、获取巡检区域对应无人机基地中各无人机的剩余续航,并根据各无人机的剩余续航判断各无人机是否需要进行充电,并对各无人机的巡检路线进行确认;
6、s3、无人机在巡检过程中通过所携带的高清摄像头对输电网的照片和/或视频图像信息进行采集与传输。
7、进一步的,对各无人机的巡检路径进行确认的方法为:
8、获取无人机基地的位置信息;
9、获取巡检区域内的输电线路以及输电节点的分布位置信息;
10、以输电节点为节点将输电线路划分为若干个仅两端为输电节点的独立输电线路;
11、获取无人机基地内巡检用的无人机数量a,通过对独立输电线路进行组合,获取a条巡检路线;
12、根据对应的a架无人机的剩余续航与a个巡检路线的分布对两者进行匹配,保证每个无人机都能完成巡检。
13、进一步的,对各无人机的巡检路径进行确认的方法为:
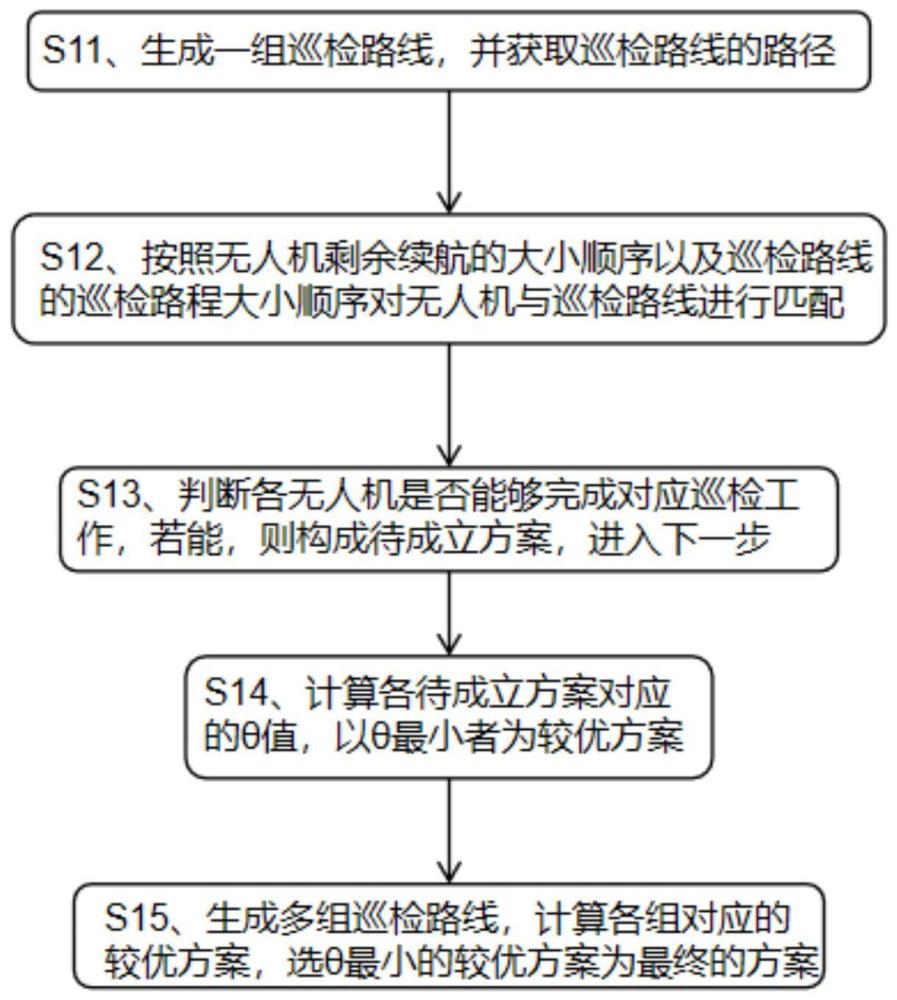
14、获取无人机完成对应巡检路线的巡检需要飞行的距离c,获取对应的a架无人机的剩余续航b,将b值与c值分别按照从大到小或从小到大的顺序排序后,再按照序号进行匹配,从而得到无人机与巡检路线的匹配方案;
15、当判断所有无人机均能完成各自对应的巡检路线的巡检工作时,则认为对应的匹配方案为待成立方案,并按照公式计算得到待成立方案的θ值;上式中:
16、a为对应的一个待成立方案中巡检路线的数量,且a≥i≥1;
17、afi为一个无人机在按照待成立方案巡检后剩余的续航值;
18、azi为afi对应的无人机在满蓄电状态下的续航值;
19、ρ为预设的小于1的值;
20、选取θ值最小的待成立方案作为较优方案;
21、在重新获取若干组a个巡检路线的选择后,继续按照上述方法依次计算对应的θ值,并将θ值最小的较优方案作为最终的方案。
22、进一步的,当判断无人机按照路径完成巡检并返回无人机基地时,其剩余续航小于预设的续航阈值ρ1,则认为无人机无法胜任对应巡检路线的巡检;
23、ρ1小于预设的续航阈值ρ。
24、进一步的,在无人机完成一个周期的巡检任务时,获取各无人机的剩余续航信息,判断在不同的巡检路线分布状况下,是否存在待成立方案,若存在待成立方案,则获取待成立方案中对应的a个巡检线路的总长rj;
25、当这a个rj值的标准差和/或
26、方差和/或
27、极差大于对应的预设值时,则认为对应的待成立方案存在异常,删除该方案;
28、根据剩余的各待成立方案计算得到各最优方案对应的θ值,并根据各最优方案的θ值判断确定最终的方案。
29、进一步的,若各方案均被删除,则通过无人机基地对电量比例最小的或剩余续航最小的无人机进行充电,并在充电完成后继续判断是否需要进行充电并确定最终的方案。
30、一种用于运行上述的配电网数字化运维方法的数字化运维系统,该系统包括:
31、模型存储模块,用于存储与更新辖区内配电网分布信息
32、无人机,用于对配电网进行智能巡检;
33、无人机基地,用于对无人机进行充电保护;
34、电量分析模块,用于对无人机的电量信息进行采集、传输与分析。
35、本发明的有益效果:
36、1、本发明通过无人机对巡检区域的输电网线路进行自动巡检,避免了巡检工作人员现场巡检,提升了巡检效率的同时,大大降低了巡检的人力成本。
37、2、本发明根据无人机的剩余续航对其需要巡检的巡检线路进行规划,充分利用无人机中的电力储备,从而避免无人机频繁的进行充电,以达到无人机电池的长时间高效利用的目的。
38、3、本发明在将对巡检路线进行划分时,考虑到不同的分割方案中各巡检路线之间的长度关系,以避免最终确定的路线导致部分无人机巡检路线较短,部分无人机巡检路线较长,进而导致部分无人机频繁的进行充电,部分无人机则充电周期较长的问题发生,起到从整体上保护无人机电池的效果。
技术特征:
1.配电网数字化运维方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的配电网数字化运维方法,其特征在于,对各无人机的巡检路径进行确认的方法为:
3.根据权利要求2所述的配电网数字化运维方法,其特征在于,对各无人机的巡检路径进行确认的方法为:
4.根据权利要求3所述的配电网数字化运维方法,其特征在于,当判断无人机按照路径完成巡检并返回无人机基地时,其剩余续航小于预设的续航阈值ρ1,则认为无人机无法胜任对应巡检路线的巡检;
5.根据权利要求4所述的配电网数字化运维方法,其特征在于,在无人机完成一个周期的巡检任务时,获取各无人机的剩余续航信息,判断在不同的巡检路线分布状况下,是否存在待成立方案,若存在待成立方案,则获取待成立方案中对应的a个巡检线路的总长rj;
6.根据权利要求5所述的配电网数字化运维方法,其特征在于,若各方案均被删除,则通过无人机基地对电量比例最小的或剩余续航最小的无人机进行充电,并在充电完成后继续判断是否需要进行充电并确定最终的方案。
7.一种用于运行如权利要求1至6任一所述的配电网数字化运维方法的数字化运维系统,该系统包括:
技术总结
本发明公开了配电网数字化运维系统及方法,属于电网控制技术领域,该方法通过无人机对巡检区域的输电网线路进行自动巡检,避免了巡检工作人员现场巡检,提升了巡检效率的同时,大大降低了巡检的人力成本。具体是根据无人机的剩余续航对其需要巡检的巡检线路进行规划,充分利用无人机中的电力储备,从而避免无人机频繁的进行充电,以达到无人机电池的长时间高效利用的目的。另外,本发明在将对巡检路线进行划分时,考虑到不同的分割方案中各巡检路线之间的长度关系,以避免导致部分无人机频繁的进行充电,部分无人机则充电周期较长的问题发生,起到从整体上保护无人机电池的效果。
技术研发人员:赵建军,王泽众,李洋,孟欣欣,刘树锦,沙凯旋
受保护的技术使用者:国网冀北电力有限公司智能配电网中心
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!