一种基于忆阻器的无人车避障方法及装置与流程
本说明书涉及无人车移动避障,尤其涉及一种基于忆阻器的无人车避障方法及装置。
背景技术:
1、如何使无人车在复杂环境中灵活、安全的移动是无人车技术研究的焦点。而实现无人车的移动避障能力的关键在于感知环境信息的精确性和确定避障策略的实时性。
2、目前,一般是采用结合深度学习模型和传统控制方法(例如,模糊控制)实现无人车的移动避障。该实现过程为通过深度学习模型感知环境信息,进而通过模糊控制系统推理无人车的避障策略,使无人车避开障碍物。但由于深度学习模型通常需要大量的计算资源和时间进行训练,训练时间周期长,时间成本高。以及深度学习模型计算需求高,无法及时响应,进而导致确定避障策略的实时性差。
3、基于此,本说明书提供了一种基于忆阻器的无人车避障方法。
技术实现思路
1、本说明书提供一种基于忆阻器的无人车避障方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种基于忆阻器的无人车避障方法,所述方法包括:
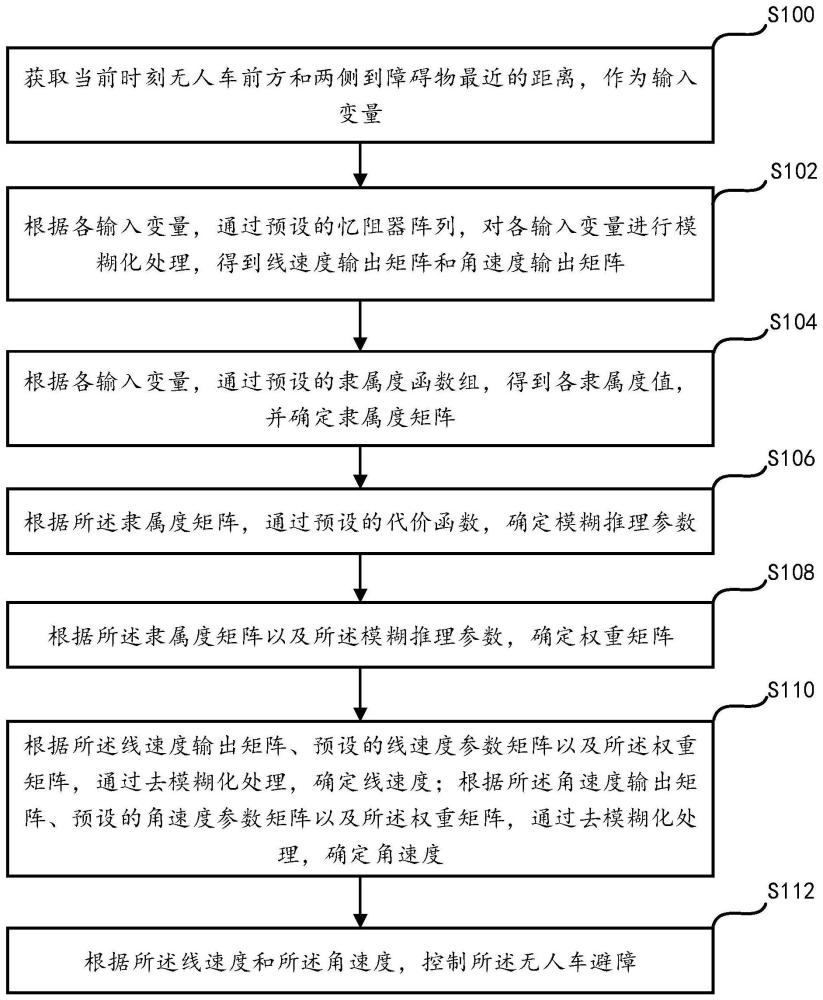
4、获取当前时刻无人车前方和两侧到障碍物最近的距离,作为输入变量;
5、根据各输入变量,通过预设的忆阻器阵列,对各输入变量进行模糊化处理,得到线速度输出矩阵和角速度输出矩阵;
6、根据各输入变量,通过预设的隶属度函数组,得到各隶属度值,并确定隶属度矩阵;
7、根据所述隶属度矩阵,通过预设的代价函数,确定模糊推理参数;
8、根据所述隶属度矩阵以及所述模糊推理参数,确定权重矩阵;
9、根据所述线速度输出矩阵、预设的线速度参数矩阵以及所述权重矩阵,通过去模糊化处理,确定线速度;根据所述角速度输出矩阵、预设的角速度参数矩阵以及所述权重矩阵,通过去模糊化处理,确定角速度;
10、根据所述线速度和所述角速度,控制所述无人车避障。
11、可选地,根据各输入变量,通过预设的隶属度函数组,得到各隶属度值,并确定隶属度矩阵,具体包括:
12、针对每个输入变量,确定该输入变量对应的方向,从预设的隶属度函数组中,确定该方向对应的的各隶属度函数,其中,输入变量的方向包括所述无人车的前方和两侧,所述两侧对应相同的隶属度函数,前方与两侧对应不同的隶属度函数;
13、根据该输入变量,通过所述该方向对应的各隶属度函数,得到该输入变量对应的各隶属度值;
14、根据各输入变量的各隶属度值,确定隶属度矩阵。
15、可选地,根据各输入变量,通过预设的忆阻器阵列,对各输入变量进行模糊化处理,得到线速度输出矩阵和角速度输出矩阵之前,所述方法还包括:
16、针对每个输入变量,确定该输入变量对应的取值范围,以预设的步长确定该输入变量对应的各取值;根据各输入变量的各取值,确定各输入变量组;通过虚拟环境遍历各输入变量组,记录各输入变量组对应的角速度和线速度;根据所述各输入变量组、各角速度以及各线速度,确定数据集;根据所述数据集,训练角速度模型和线速度模型;确定所述角速度模型的各参数值和线速度模型的各参数值,其中,所述角速度模型和所述线速度模型的模型结构相同;
17、根据所述线速度模型的各参数值,确定线速度参数矩阵;根据角速度模型的各参数值,确定角速度参数矩阵,其中,所述线速度参数矩阵中包括线性权重系数列和常数项列,所述角速度参数矩阵中包括线性权重系数列和常数项列;
18、根据所述线速度参数矩阵中的各线性权重系数列的数值范围以及忆阻器线性工作时电导值的数值范围,确定线速度的电导量化比例;根据所述角速度参数矩阵中的各线性权重系数的数值范围以及所述忆阻器线性工作时电导值的数值范围,确定角速度的电导量化比例;
19、根据线速度参数矩阵中线性权重系数列中的各元素、角速度参数矩阵中线性权重系数列对应的各元素以及各电导量化比例,确定量化后的各电导值;
20、根据所述各电导值,确定忆阻器阵列。
21、可选地,根据各输入变量,通过所述忆阻器阵列,对各输入变量进行模糊化处理,得到线速度输出矩阵和角速度输出矩阵,具体包括:
22、根据各输入变量,通过预设的电压量化比例,确定各输入变量分别对应的电压值;
23、将各电压值输入所述忆阻器阵列,得到所述忆阻器阵列输出的各电流值;
24、根据各电流值、所述电压量化比例以及所述各电导量化比例,确定线速度输出矩阵和角速度输出矩阵。
25、可选地,根据所述线速度输出矩阵、预设的线速度参数矩阵以及所述权重矩阵,通过去模糊化处理,确定线速度,具体包括:
26、根据所述线速度输出矩阵与所述线速度参数矩阵中常数项列,确定各模糊规则分别对应的线速度输出结果;
27、根据各线速度输出结果,确定线速度矩阵;
28、根据所述线速度矩阵以及所述权重矩阵,确定线速度。
29、可选地,根据所述角速度输出矩阵、预设的角速度参数矩阵以及所述权重矩阵,通过去模糊化处理,确定角速度,具体包括:
30、根据所述角速度输出矩阵与所述角速度参数矩阵中常数项列,确定各模糊规则分别对应的角速度输出结果;
31、根据各角速度输出结果,确定角速度矩阵;
32、根据所述角速度矩阵以及所述权重矩阵,确定角速度。
33、可选地,所述模糊推理参数包括线性参数和常数参数;
34、根据所述隶属度矩阵以及所述模糊推理参数,确定权重矩阵,具体包括:
35、将所述线性参数与预设的陪凑矩阵的乘积,作为第一乘积矩阵;
36、将所述常数参数与预设的常数矩阵的乘积,作为第二乘积矩阵;
37、根据所述第一乘积矩阵、所述第二乘积矩阵以及所述隶属度矩阵,确定权重矩阵。
38、本说明书提供了一种基于忆阻器的无人车避障装置,所述装置包括:
39、获取模块,用于获取当前时刻无人车前方和两侧到障碍物最近的距离,作为输入变量;
40、模糊化模块,用于根据各输入变量,通过预设的忆阻器阵列,对各输入变量进行模糊化处理,得到线速度输出矩阵和角速度输出矩阵;
41、隶属度模块,用于根据各输入变量,通过预设的隶属度函数组,得到各隶属度值,并确定隶属度矩阵;
42、模糊推理模块,用于根据所述隶属度矩阵,通过预设的代价函数,确定模糊推理参数;
43、权重模块,用于根据所述隶属度矩阵以及所述模糊推理参数,确定权重矩阵;
44、去模糊化模块,用于根据所述线速度输出矩阵、预设的线速度参数矩阵以及所述权重矩阵,通过去模糊化处理,确定线速度;根据所述角速度输出矩阵、预设的角速度参数矩阵以及所述权重矩阵,通过去模糊化处理,确定角速度;
45、控制模块,用于根据所述线速度和所述角速度,控制所述无人车避障。
46、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现一种基于忆阻器的无人车避障方法。
47、本说明书提供了一种电子设备,所述电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现一种基于忆阻器的无人车避障方法。
48、本说明书采用的上述至少一个技术方案能够达到以下有益效果:在本说明书提供的一种基于忆阻器的无人车避障方法中,通过获取无人车前方和两侧到障碍物最近的距离,作为输入变量,并对各输入变量通过忆阻器阵列进行模糊化处理,得到线速度输出矩阵和角速度输出矩阵。将各输入变量通过隶属度函数组,确定隶属度矩阵,并通过代价函数得到模糊推理参数,进而根据该隶属度矩阵和该模糊推理参数,确定权重矩阵。通过得到的线速度输出矩阵、角速度输出矩阵、权重矩阵、预设线速度参数矩阵以及预设的角速度参数矩阵,确定线速度和角速度,用于控制该无人车避障。
49、从上述方法可以看出,参考模糊控制算法,通过忆阻器阵列实现了输入变量的模糊化处理,通过隶属度函数以及模糊推理参数得到权重矩阵,实现了模糊推理,以及确定线速度和角速度实现了去模糊化处理,达到了低功耗、低延时的无人车的精准避障。
- 还没有人留言评论。精彩留言会获得点赞!