一种基于滑模控制的空中机器人的可靠控制方法
本发明涉及空中机器人可靠性控制,具体涉及一种基于滑模控制的空中机器人的可靠控制方法。
背景技术:
1、近年来,旋翼式无人机因其能够在3维空间中自由运动、成本低、体积小、悬停自由、飞行快等优点,在军事监测、自然风险管理、农业和工业自动化等领域已经得到广泛地应用。在很多实际应用场景中,除了飞行运动能力外,人们还希望飞行器具备主动作业能力,这样就能帮助人们完成更多的任务,如危险环境中样品的采集、高空清洁作业、高空设施检测、灾难环境中设备的操作等任务。因此,出现了一种新的飞行机器人系统,即一类依托无人机平台搭载实现不同功能的机械臂构件的空中机器人。
2、旋翼飞行器系统本身具有高维度、欠驱动、非线性的特性,当其与多连杆机械臂结合时,整个飞行机器人系统的维度大大增加,各个状态量之间在动力学上的耦合变得极其复杂,这使得,给空中机器人飞控系统动力学建模和精确位姿控制增加了困难。国内外许多学者已经开展了此类问题的深入研究,证实干扰观测器可有效近似估计外部干扰,同时采用滑模控制器可保证系统全局范围内的稳定性、鲁棒性。此外,该方法在基于空中机器人控制的其他公开资料及文献未见有详细报道。
技术实现思路
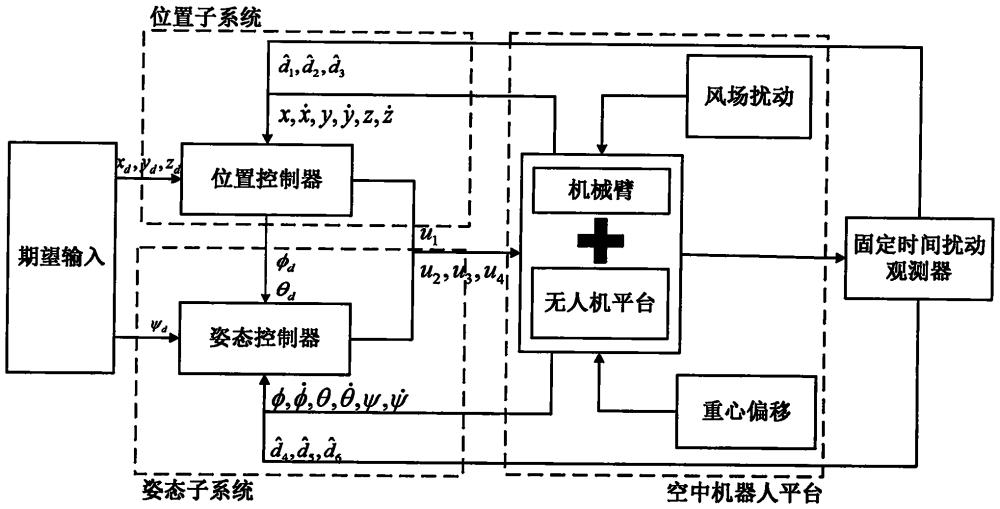
1、发明目的:针对上述技术问题,提供一种基于滑模控制的空中机器人的可靠控制方法,针对空中机器人在受到重心偏移、外部风扰的情况下仍能保持位置和姿态的稳定。
2、技术方案:本发明的一种基于滑模控制的空中机器人的可靠控制方法,包括如下步骤:
3、(1)考虑重心偏移和风场扰动问题,建立空中机器人在作业状态下的非线性动力学模型,包括位置子系统和姿态子系统模型;
4、(2)考虑重心偏移和风场扰动带来的集成扰动影响,设计固定时间扰动观测器;
5、(3)建立位置子系统的非奇异快速终端滑模面,对位置子系统模型构建虚拟控制量,根据虚拟控制量与姿态角之间的关系,得到位置子系统的位置控制输入,设计位置子系统控制器;
6、(4)根据扰动估计值,基于积分反步的非奇异快速终端滑模算法,设计姿态子系统控制器;
7、进一步,步骤1包括:
8、(101)根据牛顿第二定律,建立空中机器人的在地面坐标系下位置平移动力学模型为:
9、
10、其中,ma表示整个系统的质量,f=fi-fw-fg是系统运动产生的外力,fw代表作用于空中机器人的风力,cw是风场阻力系数,a代表风吹过的空中机器人的有效面积,vm表示风速,fg表示系统的重力,fi=rb[0 0 u1]t为机体坐标系下产生的升力矩阵,u1为位置的控制输入,rb为地面坐标系与机体坐标系之间的转换矩阵,rg=[xg yg zg]t是系统重心,rgc=[x y z]t空中机器人质心在惯性坐标系中的位置坐标;
11、(102)基于牛顿-欧拉方法,建立空中机器人的在地面坐标系下的姿态旋转动力学方程为:
12、
13、其中,m为外部转矩,m=[u2 u3 u4]t,i=[ix iy iz]t为系统惯性张量,是由重心偏移引起的额外推动力,ωb为机体坐标系下的姿态角速度,φ,θ,ψ为空中机器人飞行平台的三个姿态的欧拉角度,分别代表滚转角、俯仰角和偏航角,mw风引起的转矩,
14、(103)结合(101)和(102)可得作业型空中机器人飞行平台动力学方程:
15、
16、式中前三项为空中机器人飞行平台的位置子系统模型,后三项为姿态子系统模型,分别为x方向、y方向和z方向的加速度,分别为滚转角、俯仰角和偏航角的角加速度,[uw vw ww]t是风场的风速分量,a1,a2,a3,b1,b2,b3,c1,c2,c3是重心移位产生的变量,分别为:
17、
18、u1,u2,u3,u4满足以下条件:
19、
20、其中,ω1,ω2,ω3,ω4为电机的转速,b与k为空气密度、阻力系数等有关的常数,d是电机升力臂常数。
21、进一步,步骤2中的固定时间干扰观测器设计如下:
22、(201)将步骤103系统动力学模型变换如下:
23、
24、其中,d(t)=[d1 d2 d3 d4 d5 d6]t,f(x2)和g(x1)非线性项,
25、(202)固定时间观测器表达式设计为:
26、
27、其中,xe=x2-xp,δ为一个正常数,表示xe的估计值,是估计误差,γi>0(i=1,2,3),0<α1<1,α2>1是观测器增益,表示扰动观测器d的估计值;
28、(203)根据(202)可以得到状态估计误差表达式为:
29、
30、选取李雅普诺夫函数v1为:v1的导数为:
31、
32、由上述可得:
33、
34、因此,当t≥tp时,根据李雅普诺夫定理可知:t≥tp时,扰动观测误差为:可得t≥tp时,由此可得上述扰动观测器对系统的状态和干扰估计误差的固定时间稳定的。
35、进一步,步骤3位置子系统控制器设计过程包括:
36、(301)定义位置跟踪误差,e1=x-xd,e2=y-yd,e3=z-zd,根据非奇异终端滑模面公式建立位置子系统非奇异快速终端滑模面,表达式为:
37、
38、
39、
40、其中,ξi>0,βi>0,ri>0,i=1,2,3,
41、以位置通道x为例:对滑模面s1求导:
42、
43、(302)在不考虑重心偏移和风场扰动引起的外部扰动的情况下,位置通道x的等效控制律为:
44、
45、(303)为了在滑动流形上保持系统状态并确保固定时间收敛,切换控制律us,e可表示为:
46、
47、其中,ki>0,(i=1,2,3),0<ε1<1,ε2>1,ξ1>0,β1>0;
48、(304)根据上述的位置通道x的等效控制律以及所述切换控制律,构建位置虚拟控制:
49、
50、(305)同理,位置通道y和z的虚拟控制如下:
51、
52、
53、(306)给定偏航角的期望信号ψd,根据步骤103中虚拟控制量ux,uy,uz与三个姿态角的关系,得到滚转角和俯仰角的期望信号φd、θd以及位置子系统的控制输入u1:
54、
55、φd和θd作为期望信号用于姿态角控制器的设计,ψd取值范围为
56、进一步,考虑位置控制器能控保证系统的稳定性,建立选取李雅普诺夫函数,表达式为:
57、
58、对v2求导:
59、
60、若存在则位置控制器能保证位置子系统存在李雅普诺夫稳定;
61、
62、其中,ψ1=min{k1,δγ1},ψ2=min{k2,δγ2},ε1=α1,ε2=α2,可以求得系统状态能够在t≤t1内到达滑模面上,t1为:
63、
64、为了确定系统状态从滑模面到平衡点的收敛时间,取李雅普诺夫函数v3为:
65、
66、取β1=β2=β3和r1=r2=r3可得:可以得到误差到达平衡点的时间t2为:
67、
68、可得位置子系统状态稳定时间tsum为:
69、tsum≤t1+t2
70、基于上述分析,该方案保证了位置子系统跟踪误差在固定时间内达到平衡点。
71、进一步,步骤4中姿态子系统控制器设计过程包括:
72、(401)定义滚转角φ、俯仰角θ、偏航角ψ的跟踪误差,以及误差的导数分别为:
73、eφ=φ-φd,
74、eθ=θ-θd,
75、eψ=ψ-ψd,
76、φ,θ,ψ表示三个姿态角的实际值,φd,θd,ψd表示三个姿态角的期望值;
77、(402)以姿态通道φ为例,为了保证稳定性,选取第一个李雅普诺夫函数v4如下:
78、
79、其中,kφ>0是积分误差系数,
80、(403)v2的导数如下:
81、
82、(404)由(403)可得虚拟控制输入为:其中,kφ是一个非零常数,由此可得:可知:如果sφ→0,则
83、(405)建立滚转角φ通道控制器滑模面为
84、
85、其中,ξ4>0,β4>0,r4>0;对sφ求导:
86、
87、(406)为了获得姿态的稳定控制律,我们定义第二个李雅普诺夫函数其导数如下:
88、
89、(407)不考虑外部扰动时,姿态通道φ的等效控制率为:
90、
91、(408)引入固定时间扰动估计,构建姿态通道φ的滑模切换率:
92、
93、(409)根据所述姿态通道φ的等效控制律、切换控制律,构建控制输入为:
94、
95、(410)同理可得,姿态通道θ和姿态通道ψ的控制输入为:
96、
97、
98、进一步,考虑姿态控制器能保证姿态子系统的稳定性,建立李雅普诺夫函数v6,表达式为:
99、
100、对v6求导:
101、
102、若存在时,则姿态控制器能保证姿态子系统存在李雅普诺夫稳定。
103、有益效果:本发明与现有技术相比,其显著优点是:
104、1、本发明考虑重心偏移和风场扰动问题,建立更符合实际的空中机器人在作业状态下的非线性动力学模型;
105、2、本发明通过固定时间扰动观测器,精确计算出空中机器人在作业过程中,受到的重心偏移和外部风扰,结合飞行控制器,有效降低内外部扰动对空中机器人飞控系统的影响;
106、3、利用非奇异快速终端滑模与新的切换率相结合的位置控制器和积分反步与非奇异终端滑模方法相结合的姿态控制器,避免了奇异问题,实现了固定时间收敛,减小稳态误差,提供了高精度跟踪。
- 还没有人留言评论。精彩留言会获得点赞!