一种整车在环测试系统的制作方法
本发明涉及智能网联,具体而言,涉及一种整车在环测试系统。
背景技术:
1、自动驾驶仿真测试主要是以数学建模的方式将自动驾驶的应用场景进行数字化,建立尽可能接近真实世界的系统模型,通过软件仿真实现对自动驾驶系统的测试验证。
2、目前,通常采用场内测试的方式。然而,这种方式虽然测试效率较高,且能够克服场外测试场景覆盖度不足的缺陷,但是一些功能的测试结果可行度不足,测试精度较低。
技术实现思路
1、本发明提供一种整车在环测试系统,主要在于能够提高场内测试精度。
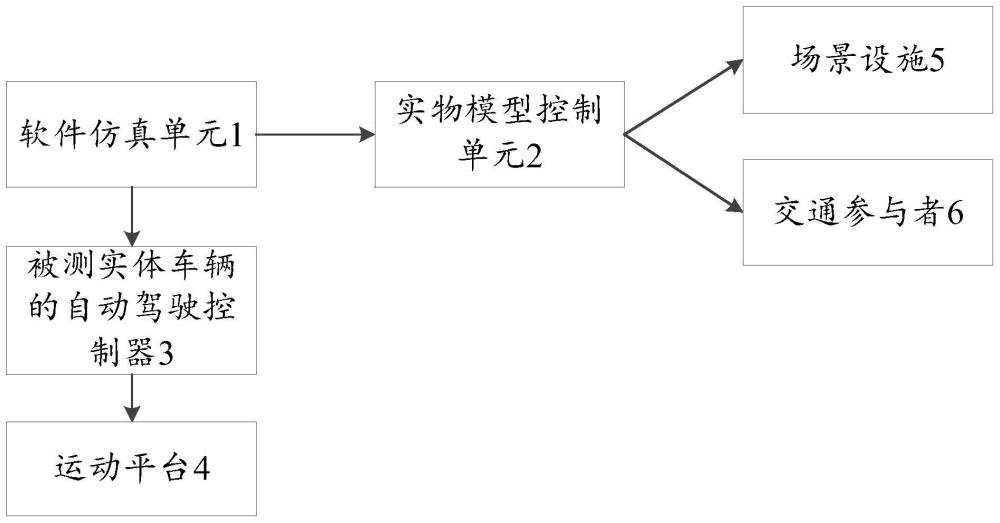
2、根据本发明实施例的第一方面,提供一种整车在环测试系统,包括:软件仿真单元、置于场内的运动平台、位于所述运动平台上的被测实体车辆和实物模型控制单元;
3、所述实物模型控制单元,用于按照所述软件仿真单元中预先设定的运动剧本,控制室内的场景设施和交通参与者运动;
4、所述软件仿真单元,用于向所述被测实体车辆的自动驾驶控制器发送自动驾驶功能开启指令;
5、所述自动驾驶控制器,用于根据所述自动驾驶功能开启指令,收集车载传感器针对所述场景设施和所述交通参与者产生的传感器信号,并根据所述传感器信号,生成所述被测实体车辆的运动行为控制信号;
6、所述运动平台,用于接收所述自动驾驶控制器发送的运动行为控制信号,并根据所述运动行为控制信号进行操作,以模拟所述被测实体车辆在真实路面的行驶状态。
7、可选地,所述运动平台包括:转鼓,所述被测实体车辆的轮胎放置于所述转鼓内;
8、所述自动驾驶控制器,用于将所述被测实体车辆的运动行为控制信号传递给所述转鼓;
9、所述转鼓,用于将所述被测实体车辆的运动行为控制信号传递给所述软件仿真单元;
10、所述软件仿真单元,用于根据所述运动行为控制信号,解算所述轮胎与地面之间的力及力矩,并将所述力及力矩反馈给所述转鼓进行地面模拟。
11、可选地,所述运动平台包括:转台,所述转鼓固定于所述转台上,所述转台可进行旋转;
12、所述自动驾驶控制器,用于将所述被测实体车辆的运动行为控制信号传递给所述转台;
13、所述转台,用于将所述被测实体车辆的运动行为控制信号传递给所述软件仿真单元;
14、所述软件仿真单元,用于根据所述运动行为控制信号,解算所述被测实体车辆的转向角度,并将所述转向角度反馈给所述转台进行转向模拟。
15、可选地,所述运动平台还包括:环境舱,所述环境舱固定于所述转台上;
16、所述环境舱,用于按照所述软件仿真单元预先设定的环境信息,模拟车辆真实行驶环境。
17、可选地,所述软件仿真单元,用于获取所述被测实体车辆、所述交通参与者和所述场景设施的实时位置信息和实时速度信息;根据所述被测实体车辆、所述交通参与者和所述场景设施的实时位置信息和实时速度信息,确定仿真场景交互关系,并将所述仿真场景交互关系发送给所述实物模型控制单元;
18、所述实物模型控制单元,用于根据所述仿真场景交互关系,控制所述场景设施和所述交通参与者运动。
19、可选地,所述软件仿真单元,用于根据所述被测实体车辆、所述交通参与者和所述场景设施的实时位置信息和实时速度信息,确定所述交通参与者相对于所述被测实体车辆的速度变化和位置变化,以及所述场景设施相对于所述被测实体车辆的速度变化和位置变化;根据所述交通参与者相对于所述被测实体车辆的速度变化和位置变化,以及所述场景设施相对于所述被测实体车辆的速度变化和位置变化,确定仿真场景交互关系。
20、根据本发明实施例的第二方面,提供一种整车在环测试方法,包括:
21、响应于软件仿真单元发送的自动驾驶功能开启指令,收集车载传感器针对所述场景设施和所述交通参与者产生的传感器信号;
22、根据所述传感器信号,生成所述被测实体车辆的运动行为控制信号;
23、将所述运动行为控制信号发送给运动平台,以控制所述运动平台模拟所述被测实体车辆在真实路面的行驶状态。
24、根据本发明实施例的第三方面,提供一种整车在环测试装置,包括:
25、收集单元,用于响应于软件仿真单元发送的自动驾驶功能开启指令,收集车载传感器针对所述场景设施和所述交通参与者产生的传感器信号;
26、生成单元,用于根据所述传感器信号,生成所述被测实体车辆的运动行为控制信号;
27、控制单元,用于将所述运动行为控制信号发送给运动平台,以控制所述运动平台模拟所述被测实体车辆在真实路面的行驶状态。
28、根据本发明实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现以下步骤:
29、响应于软件仿真单元发送的自动驾驶功能开启指令,收集车载传感器针对所述场景设施和所述交通参与者产生的传感器信号;
30、根据所述传感器信号,生成所述被测实体车辆的运动行为控制信号;
31、将所述运动行为控制信号发送给运动平台,以控制所述运动平台模拟所述被测实体车辆在真实路面的行驶状态。
32、根据本发明实施例的第五方面,提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现以下步骤:
33、响应于软件仿真单元发送的自动驾驶功能开启指令,收集车载传感器针对所述场景设施和所述交通参与者产生的传感器信号;
34、根据所述传感器信号,生成所述被测实体车辆的运动行为控制信号;
35、将所述运动行为控制信号发送给运动平台,以控制所述运动平台模拟所述被测实体车辆在真实路面的行驶状态。
36、本发明提供的一种整车在环测试系统,在场内将实车作为被测件,并通过操控运动平台模拟车辆在真实路面的行驶状态,从而能够提高场内测试精度。
37、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种整车在环测试系统,其特征在于,包括:软件仿真单元、置于场内的运动平台、位于所述运动平台上的被测实体车辆和实物模型控制单元;
2.根据权利要求1所述的系统,其特征在于,所述运动平台包括:转鼓,所述被测实体车辆的轮胎放置于所述转鼓内;
3.根据权利要求2所述的系统,其特征在于,所述运动平台包括:转台,所述转鼓固定于所述转台上,所述转台可进行旋转;
4.根据权利要求3所述的系统,其特征在于,所述运动平台还包括:环境舱,所述环境舱固定于所述转台上;
5.根据权利要求1所述的系统,其特征在于,
6.根据权利要求5所述的系统,其特征在于,
7.一种整车在环测试方法,其特征在于,包括:
8.一种整车在环测试装置,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求7所述的方法的步骤。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求7所述的方法的步骤。
技术总结
本发明公开了一种整车在环测试系统,本发明涉及智能网联技术领域,其中包括:软件仿真单元、置于场内的运动平台、位于运动平台上的被测实体车辆和实物模型控制单元;实物模型控制单元,用于按照软件仿真单元中预先设定的运动剧本,控制室内的场景设施和交通参与者运动;软件仿真单元,用于向被测实体车辆的自动驾驶控制器发送自动驾驶功能开启指令;自动驾驶控制器,用于根据自动驾驶功能开启指令,收集车载传感器针对场景设施和交通参与者产生的传感器信号,并根据传感器信号,生成被测实体车辆的运动行为控制信号;运动平台,用于根据运动行为控制信号进行操作,以模拟被测实体车辆在真实路面的行驶状态。本发明能够提高场内测试精度。
技术研发人员:刘虹葳,孔德聪,李华,方达龙,褚文博
受保护的技术使用者:西部科学城智能网联汽车创新中心(重庆)有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!