一种基于贝叶斯算法的PID全自动智能调节方法与流程
本发明涉及eps自动泊车,具体为一种基于贝叶斯算法的pid全自动智能调节方法。
背景技术:
1、eps自动泊车功能是通过双环pid算法实现扭矩输出从而控制方向盘转动,调试过程需要获得一组合适的pid参数,使得实际响应的角度曲线与车辆泊车控制器发送的请求角度曲线之间的差值满足客户要求的性能及验收要求,目前的主要调试方法是工程师手动调整,但通过人工调试的缺点就是周期长且效率低。
2、而在实际使用的过程中,人工调节往往依赖工程师的主观判断和经验,调节过程具有一定的主观性。不同工程师可能会有不同的调节策略和偏好,导致调节结果的不一致性和可重复性较差。人工调节需要大量的时间和精力,尤其是在面对复杂的转向系统或多变的工况时。工程师需要进行多次试验和调整,迭代地优化参数,这会消耗较长的时间,降低调节的效率。此外,人工调节往往无法有效应对系统动态变化和不确定性。转向系统在不同工况下可能会发生变化,例如负载变化、环境条件变化等,人工调节难以实时感知和响应这些变化,导致控制性能的下降。人工调节往往无法自适应地调整控制参数以适应不同工况和系统变化。工程师需要手动调整参数,无法及时响应系统的动态变化和优化需求,导致控制性能的局限性和不稳定性。
3、难以处理不确定性和噪声:人工调节往往难以处理转向系统中的不确定性和噪声。不确定性和噪声可能来自传感器误差、环境干扰等因素,影响调节的准确性和稳定性。人工调节缺乏对不确定性的量化和处理能力,导致控制性能的下降。
4、鉴于此,我们提出了一种基于贝叶斯算法的pid全自动智能调节方法。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于贝叶斯算法的pid全自动智能调节方法,解决了上述背景技术提到的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于贝叶斯算法的pid全自动智能调节方法,所述方法包括以下步骤:
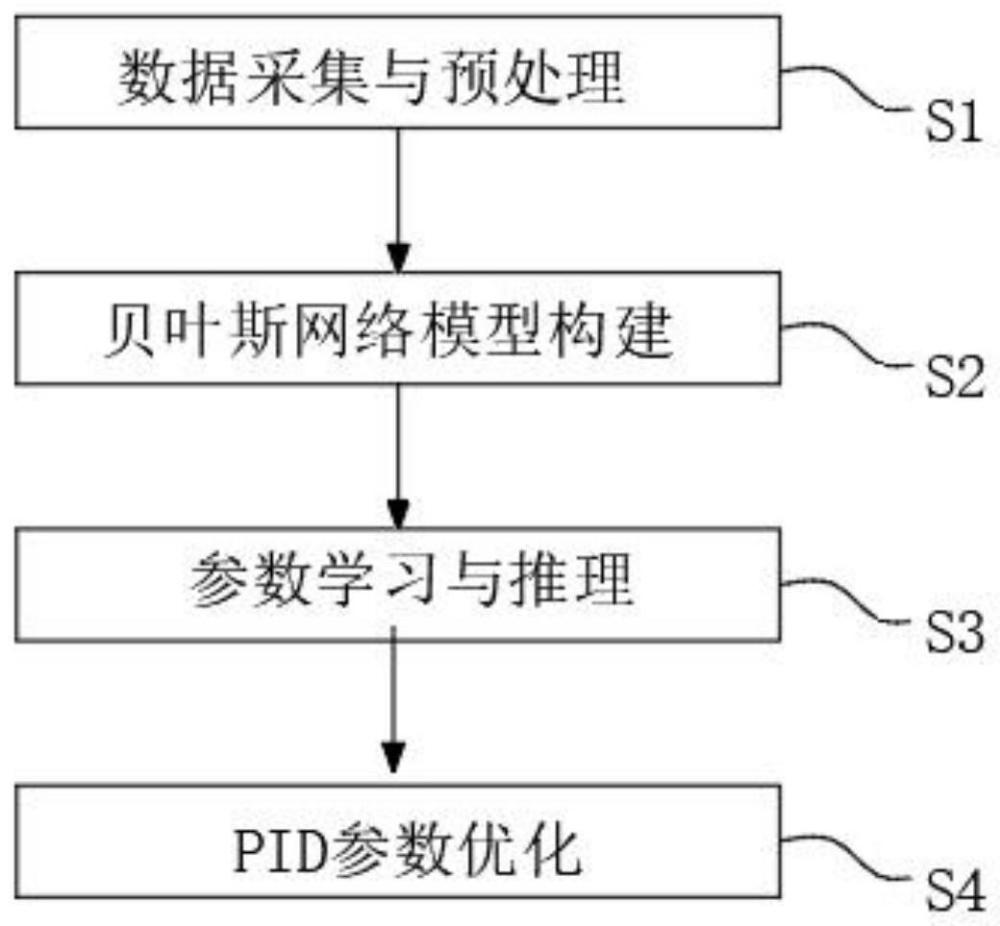
3、步骤s1、数据采集与预处理;
4、步骤s2、贝叶斯网络模型构建;
5、步骤s3、参数学习与推理,参数学习根据实时数据对贝叶斯网络模型中的参数进行估计和优化,参数学习的方法包括:最大似然估计、期望最大化算法,参数推理是指根据观测数据和先验知识,通过贝叶斯推理来获得系统状态的后验概率分布;
6、步骤s4、pid参数优化,在贝叶斯网络模型和推理的基础上,使用探索算法来优化pid控制器的参数。
7、可选的,所述步骤s1进一步的包括:采集转向系统的实时数据,所述实时数据用于建立贝叶斯网络模型和进行参数学习的实时数据,所述实时数据包括输入信号数据和输出信号数据,所述输入信号数据包括转向角度和转向速度,所述输出信号数据包括转向扭矩。
8、可选的,所述步骤s2进一步的包括:基于采集到的实时数据构建贝叶斯网络模型,贝叶斯网络模描述转向系统的动态特性和参数之间的关系,贝叶斯网络由节点和边组成,节点的概率分布函数根据先验知识和数据进行确定,且所述贝叶斯网络的构建使用专业的贝叶斯网络建模工具或编程库来实现。
9、可选的,所述概率分布函数为:p(ab)=p(a)p(b);通过计算给定对象的先验概率,利用贝叶斯定理p(y|x)=p(x|y)p(y)/p(x),计算其后验概率,再比较各后验概率的大小,最后确定给定对象属于的类别。
10、可选的,贝叶斯概率计算的具体步骤包括:
11、假设给定一数据集x={x1,x2,x3…xn},每个x含有m个属性,记为c1,c2,c3,…,cm;
12、每个x一一对应一个y={y1,y2,y3,…,yn}通过给出数据可以计算先验概率p(y);
13、给出一个已知各属性,未知其映射yi的量xi(c1i,c2i,c3i,…,cmi),分别计算y1,y2,y3,…,yn后验概率p(y|xi),比较各后验概率大小,取最大值p(y|xi)max,则其对应的yi即为xi所对应。
14、可选的,所述步骤s4包括:根据给定的显性数据初步估计出能拟合该数据分布的模型参数,再根据已估计出的模型参数预测隐性数据的值,然后根据估计出的隐性数据及之前给出的显性数据再重新对参数进行估计,反复迭代上述步骤直至收敛后结束迭代,对于一个含有隐变量z的概率模型,假设给定显性数据为y,则概率模型关于y的概率分布为p(y|θ),其中θ为要估计的模型参数.则显性数据y关于模型参数θ的对数似然函数为l(θ)=logp(y|θ);假设显性数据y和隐变量z之间的联合概率分布为p(y,z|θ),则整体的对数似然函数为l(θ)=log∑z p(y,z|θ),算法通过迭代求解显性数据y关于模型参数θ的对数似然函数l(θ)=log∑z p(y|θ)的极大近似,从而得到参数θ的估计值,即l(θ)=log∑z p(y|θ)=log∑z p(y,z|θ)。
15、可选的,所述探索算法基于概率模型进行控制器参数的采样和优化,所述探索算法包括马尔科夫链蒙特卡洛方法(mcmc)、粒子群优化(pso);通过不断地采样和优化,找到最优的pid控制器参数,实现控制。
16、本发明提供了一种基于贝叶斯算法的pid全自动智能调节方法。具备以下有益效果:
17、1、该基于贝叶斯算法的pid全自动智能调节方法,可以自动地学习和调节pid控制器的参数,减少了人工干预的需求,提高了调节的效率和准确性,同时能够根据实时数据和先验知识进行自适应调节。它能够实时感知转向系统的变化,并根据实际情况自动调整pid控制器的参数,使系统在不同工况下保持最佳的控制性能。这种自适应性使得系统更加灵活和鲁棒,适应性能更强。
18、2、该基于贝叶斯算法的pid全自动智能调节方法,叶斯算法能够有效地处理不确定性和噪声。它将不确定性建模为概率分布,通过推理和更新过程,对不确定性进行量化和处理。这样可以更准确地预测和控制转向系统的行为,提高系统的稳定性和可靠性;同时能够有效地利用先验信息。通过将先验知识转化为概率分布,可以为调节过程提供系统的初始估计和边界信息,加快参数调节的收敛速度,并在系统启动时提供更好的控制性能。
19、3、该基于贝叶斯算法的pid全自动智能调节方法,贝叶斯算法能够通过异常检测和修正机制提高系统的鲁棒性。可以实时监测转向系统的行为,并根据异常检测结果采取相应的控制策略进行修正。这样可以及时发现并应对潜在的故障或异常情况,保证系统的安全和可靠性。
技术特征:
1.一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:所述步骤s1进一步的包括:采集转向系统的实时数据,所述实时数据用于建立贝叶斯网络模型和进行参数学习的实时数据,所述实时数据包括输入信号数据和输出信号数据,所述输入信号数据包括转向角度和转向速度,所述输出信号数据包括转向扭矩。
3.根据权利要求1所述的一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:所述步骤s2进一步的包括:基于采集到的实时数据构建贝叶斯网络模型,贝叶斯网络模描述转向系统的动态特性和参数之间的关系,贝叶斯网络由节点和边组成,节点的概率分布函数根据先验知识和数据进行确定,且所述贝叶斯网络的构建使用专业的贝叶斯网络建模工具或编程库来实现。
4.根据权利要求3所述的一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:所述概率分布函数为:p(ab)=p(a)p(b);通过计算给定对象的先验概率,利用贝叶斯定理p(y|x)=p(x|y)p(y)/p(x),计算其后验概率,再比较各后验概率的大小,最后确定给定对象属于的类别。
5.根据权利要求4所述的一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:贝叶斯概率计算的具体步骤包括:
6.根据权利要求1所述的一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:所述步骤s4包括:根据给定的显性数据初步估计出能拟合该数据分布的模型参数,再根据已估计出的模型参数预测隐性数据的值,然后根据估计出的隐性数据及之前给出的显性数据再重新对参数进行估计,反复迭代上述步骤直至收敛后结束迭代,对于一个含有隐变量z的概率模型,假设给定显性数据为y,则概率模型关于y的概率分布为p(y|θ),其中θ为要估计的模型参数.则显性数据y关于模型参数θ的对数似然函数为l(θ)=log p(y|θ);假设显性数据y和隐变量z之间的联合概率分布为p(y,z|θ),则整体的对数似然函数为l(θ)=log∑zp(y,z|θ),算法通过迭代求解显性数据y关于模型参数θ的对数似然函数l(θ)=log∑zp(y|θ)的极大近似,从而得到参数θ的估计值,即l(θ)=log∑zp(y|θ)=log∑zp(y,z|θ)。
7.根据权利要求1所述的一种基于贝叶斯算法的pid全自动智能调节方法,其特征在于:所述探索算法基于概率模型进行控制器参数的采样和优化,所述探索算法包括马尔科夫链蒙特卡洛方法(mcmc)、粒子群优化(pso);
技术总结
本发明公开了一种基于贝叶斯算法的PID全自动智能调节方法,涉及EPS自动泊车技术领域。包括以下步骤:数据采集与预处理;贝叶斯网络模型构建;参数学习与推理以及PID参数优化。该基于贝叶斯算法的PID全自动智能调节方法,可以自动地学习和调节PID控制器的参数,减少了人工干预的需求,提高了调节的效率和准确性,同时能够根据实时数据和先验知识进行自适应调节。它能够实时感知转向系统的变化,并根据实际情况自动调整PID控制器的参数,使系统在不同工况下保持最佳的控制性能。这种自适应性使得系统更加灵活和鲁棒,适应性能更强。
技术研发人员:陈雷,徐高峰
受保护的技术使用者:巅峰表现(上海)科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!