一种非线性集群系统的仿射编队机动控制方法及系统
本发明涉及集群系统控制,特别是涉及一种非线性集群系统的仿射编队机动控制方法及系统。
背景技术:
1、目前,针对多智能体集群系统的分布式优化问题的研究引起了广泛的关注,比如在多移动机器人系统、智能电力系统及资源分配等问题中。其中多智能体以一种分布式的、优化的方法,通过相互之间的合作完成最小化全局成本函数的任务。在编队跟踪问题中,集群系统不仅需要跟踪特定的参考轨迹,通常还需要满足特定的团体性能约束,例如提高团体的效能、最小化跟踪能量和缩短任务时间等。因此,考虑团体性能的集群系统的编队跟踪问题的控制研究具有重要的意义和效益。
2、多智能体分布式优化问题多集中于离散系统,随着连续系统在工程应用中得到越来越多的关注,针对连续时间系统的分布式优化问题也得到了广泛的研究。一些分布式连续时间算法、基于梯度算法、基于事件触发的分布式优化算法被应用于求解各种连续时间的集群系统的优化问题,如一阶连续系统、高阶连续系统及欧拉-拉格朗日集群系统等。值得注意的是,此类优化问题往往关注于智能体具有时不变的局部成本函数,也就是成本函数只与系统的状态相关。此类时不变优化问题只能用来处理编队形成及编队镇定问题。与时不变优化问题相比,成本函数的时变特性可以提供更多的控制器设计自由,通过选择合适的时变成本函数,可以应对更加复杂的动态环境,如个体之间满足避撞约束、集群需要躲避空间中的障碍物、集群通过狭窄区域等任务。因此,基于分布式时变优化算法,可以用来处理时变编队跟踪问题。基于分布式优化策略解决时变编队跟踪问题时,往往集中关注于集群系统的一致性特质,即集群内的个体在最小化团体性能函数的同时,达到状态的一致。除了利用标准的拉普拉斯算子来表述一致性约束之外,此类时变优化问题对其成本函数还有特定的要求,比如在设计一致性跟踪控制器时,不仅要求局部成本函数是强凸的,还要求其具有相同的hessians矩阵,即海森矩阵。
3、然而,集群中的个体之间的关系除了合作之外,还存在竞争、对抗和攻击等情况。此时约束条件则需要使用一般拉普拉斯算子,如应力矩阵、符号拉普拉斯算子来描述,此时通信拓扑关系图的边权重同时存在正、负和零的情况。关于标准拉普拉斯算子,在机器人系统、电力系统及社交网络等领域得到了大量的研究。一般拉普拉斯算子中负权重的存在可以用来构造机器人系统编队控制中的结构刚度、电力系统的异质关系以及社会网络的对抗性通信等。由于存在这种性质,因此一般的拉普拉斯算子可以使每个智能体能够在实际应用中执行更复杂的任务,如编队机动、能量平衡和集群合作等。尽管优化技术在控制算法的设计中得到了广泛的应用,但这些成果中很少有将一般拉普拉斯算子应用于时变优化问题。具有一般拉普拉斯算子约束,即利用应力矩阵来描述编队构型的仿射编队控制问题的研究已经引起了众多学者的关注。比如针对多航天器集群系统,研究学者提出了仿射编队控制算法,采用两层策略解决目标合围与避碰问题。需要指出的是,尽管有大量的研究集中在分布式优化和仿射编队机动上,但很少有研究具有仿射编队约束的时变优化问题。
技术实现思路
1、本发明的目的是提供一种非线性集群系统的仿射编队机动控制方法及系统,以实现最小化非线性集群系统的全局成本函数,进行灵活的仿射编队机动,从而执行各种复杂的任务。
2、为实现上述目的,本发明提供了如下方案。
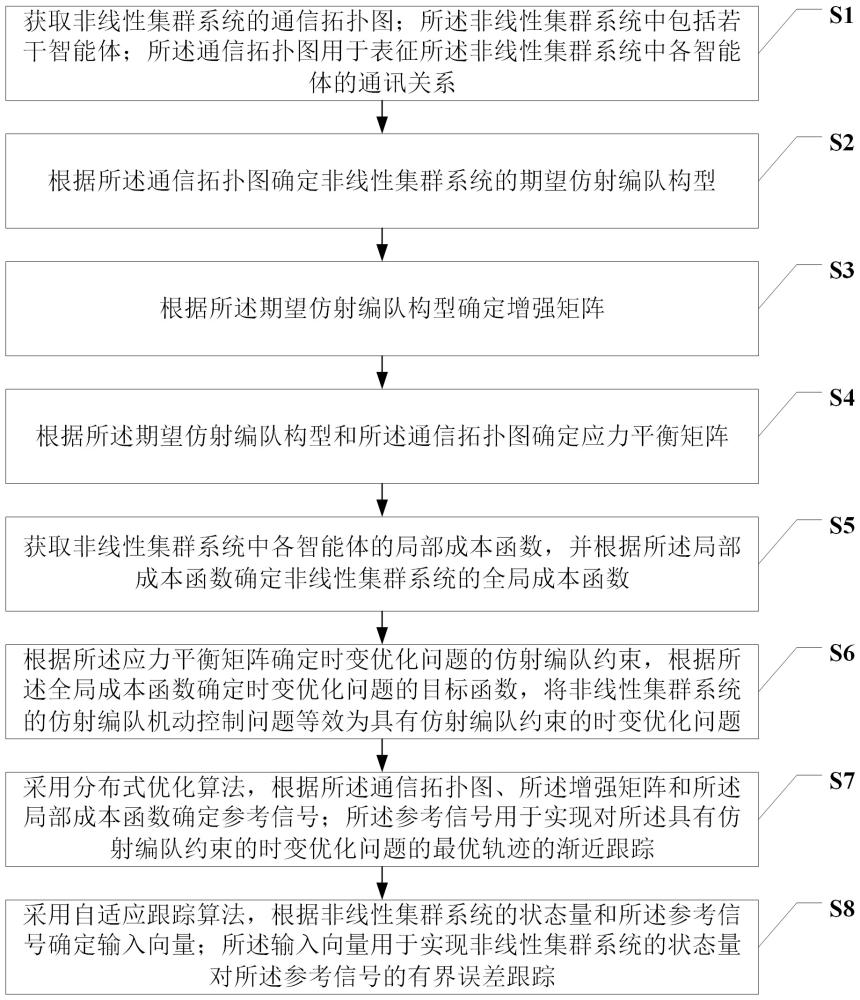
3、一种非线性集群系统的仿射编队机动控制方法,包括:获取非线性集群系统的通信拓扑图;所述非线性集群系统中包括若干智能体;所述通信拓扑图用于表征所述非线性集群系统中各智能体的通讯关系;根据所述通信拓扑图确定非线性集群系统的期望仿射编队构型;根据所述期望仿射编队构型确定增强矩阵;根据所述期望仿射编队构型和所述通信拓扑图确定应力平衡矩阵;获取非线性集群系统中各智能体的局部成本函数,并根据所述局部成本函数确定非线性集群系统的全局成本函数;根据所述应力平衡矩阵确定时变优化问题的仿射编队约束,根据所述全局成本函数确定时变优化问题的目标函数,将非线性集群系统的仿射编队机动控制问题等效为具有仿射编队约束的时变优化问题;采用分布式优化算法,根据所述通信拓扑图、所述增强矩阵和所述局部成本函数确定参考信号;所述参考信号用于实现对所述具有仿射编队约束的时变优化问题的最优轨迹的渐近跟踪;采用自适应跟踪算法,根据非线性集群系统的状态量和所述参考信号确定输入向量;所述输入向量用于实现非线性集群系统的状态量对所述参考信号的有界误差跟踪。
4、可选地,根据所述通信拓扑图确定非线性集群系统的期望仿射编队构型,具体包括:根据所述通信拓扑图确定一个由点集合组成的向量作为候选编队构型;所述点集合中的一个点表示一个智能体的位置;判断所述候选编队构型是否满足仿射空间张成条件,得到判断结果;若所述判断结果为否,则调整所述点集合以更新所述候选编队构型,并返回判断所述候选编队构型是否满足仿射空间张成条件,得到判断结果的步骤;若所述判断结果为是,则将所述候选编队构型确定为非线性集群系统的期望仿射编队构型。
5、可选地,根据所述期望仿射编队构型确定增强矩阵,具体公式为:;其中,为增强矩阵,为期望仿射编队构型,为智能体1的位置,为智能体n的位置,n为智能体的个数。
6、可选地,根据所述期望仿射编队构型和所述通信拓扑图确定应力平衡矩阵,具体包括:根据所述期望仿射编队构型和所述通信拓扑图,采用公式确定权重;其中,为智能体i的邻居智能体集合,为智能体i与智能体j之间的权重,为智能体i的位置,为智能体j的位置,为智能体集合;根据所述权重,采用公式确定应力平衡矩阵;其中,为应力平衡矩阵,为应力平衡矩阵中第i行第j列的元素,为智能体i与智能体k之间的权重。
7、可选地,根据所述应力平衡矩阵确定时变优化问题的仿射编队约束,根据所述全局成本函数确定时变优化问题的目标函数,将非线性集群系统的仿射编队机动控制问题等效为具有仿射编队约束的时变优化问题,具体公式为:;其中,min为最小值函数,为全局成本函数,为智能体i的局部成本函数,为非线性集群系统的状态函数,为智能体i的状态函数,t为时间,为n×n阶实数集,n为智能体的状态量的维度,为应力平衡矩阵,为单位矩阵,x为非线性集群系统的状态量,n为智能体的个数。
8、可选地,采用分布式优化算法,根据所述通信拓扑图、所述增强矩阵和所述局部成本函数确定参考信号,具体公式为:;其中,为智能体i的参考信号,为的一阶导数,为智能体j的参考信号,为智能体i与智能体j之间的权重,为与智能体i的局部成本函数相关的信息,为智能体i的邻居智能体集合,为增强矩阵关于智能体i的分量,为与单位矩阵的克罗内克积,为智能体i的局部成本函数的梯度信息,为智能体i的局部成本函数的梯度信息关于t的偏微分,为智能体i的局部成本函数的梯度信息关于的偏微分,t为时间。
9、可选地,采用自适应跟踪算法,根据非线性集群系统的状态量和所述参考信号确定输入向量,具体公式为:;其中,为智能体i的输入向量,为智能体i的跟踪误差系数,为智能体i的状态量,为智能体i的参考信号,为与相关的函数,为的观测量,为智能体i的未知参数向量,为的一阶导数,为智能体i的正定矩阵。
10、一种非线性集群系统的仿射编队机动控制系统,包括:通信拓扑图获取模块,用于获取非线性集群系统的通信拓扑图;所述非线性集群系统中包括若干智能体;所述通信拓扑图用于表征所述非线性集群系统中各智能体的通讯关系;期望仿射编队构型确定模块,用于根据所述通信拓扑图确定非线性集群系统的期望仿射编队构型;增强矩阵确定模块,用于根据所述期望仿射编队构型确定增强矩阵;应力平衡矩阵确定模块,用于根据所述期望仿射编队构型和所述通信拓扑图确定应力平衡矩阵;成本函数确定模块,用于获取非线性集群系统中各智能体的局部成本函数,并根据所述局部成本函数确定非线性集群系统的全局成本函数;时变优化问题等效模块,用于根据所述应力平衡矩阵确定时变优化问题的仿射编队约束,根据所述全局成本函数确定时变优化问题的目标函数,将非线性集群系统的仿射编队机动控制问题等效为具有仿射编队约束的时变优化问题;参考信号确定模块,用于采用分布式优化算法,根据所述通信拓扑图、所述增强矩阵和所述局部成本函数确定参考信号;所述参考信号用于实现对所述具有仿射编队约束的时变优化问题的最优轨迹的渐近跟踪;输入向量确定模块,用于采用自适应跟踪算法,根据非线性集群系统的状态量和所述参考信号确定输入向量;所述输入向量用于实现非线性集群系统的状态量对所述参考信号的有界误差跟踪。
11、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的非线性集群系统的仿射编队机动控制方法,同时考虑了非线性集群系统的参数不确定性、时变成本函数及仿射编队约束等条件。首先将非线性集群系统的仿射编队机动控制问题等效为一个具有仿射编队约束的时变优化问题。然后通过引入参考信号,设计分布式优化算法,可以实现参考信号对具有仿射编队约束的时变优化问题的最优轨迹的渐近跟踪。最后设计自适应跟踪算法,使非线性集群系统的状态量可以实现对参考信号的有界误差跟踪。本发明能够实现最小化非线性集群系统的全局成本函数,进行灵活的仿射编队机动,从而执行各种复杂的任务。
- 还没有人留言评论。精彩留言会获得点赞!