一种清洁机器人路径规划方法与流程
本发明涉及清洁机器人,尤其涉及一种清洁机器人路径规划方法。
背景技术:
1、清洁机器人,又称扫地机器人,是智能家电的一种,能凭借人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
2、在人们的家居生活中,清洁机器人的应用程度较多,能够在空闲的时候对家里的地面进行表面清洁,但其清洁的过程中,通常是采用的是随机路径清扫方式,遇到障碍物就进行下一个随机路径,清扫的效率较低,且随着家里的面积增大,房间数量增多,随机路径清扫的方式则使清洁机器人无法满足日益增长的需求,因此本发明提出一种清洁机器人路径规划方法以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本发明的目的在于提出一种清洁机器人路径规划方法,该种清洁机器人路径规划方法具有适应性好的优点,解决现有技术中存在的问题。
2、为实现本发明的目的,本发明通过以下技术方案实现:一种清洁机器人路径规划方法,包括以下步骤:
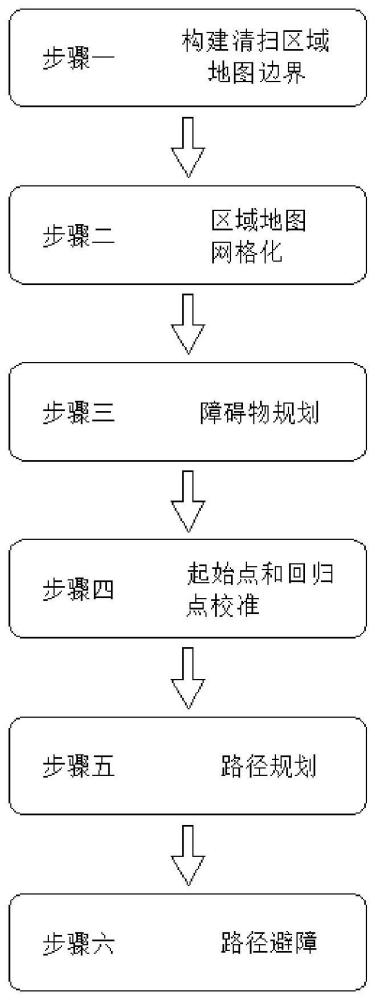
3、步骤一、构建清扫区域地图边界
4、在控制终端上,构建清扫目标的区域地图,以边界线的方式进行规划,形成一个完整的闭环,即为清扫区域的边界;
5、步骤二、区域地图网格化
6、在控制终端上,对规划好的区域地图进行网格化,将其均匀的分为若干组小方格,即得到区域网格地图;
7、步骤三、障碍物规划
8、通过控制终端控制机器人移动,即以手动操作的方式,依据步骤二中得到的区域网格地图,进行移动,遇到障碍物时手动避让,直至区域网格地图内的范围移动完毕;
9、步骤四、起始点和回归点校准
10、将清洁机器人移动至一个方格区域内,并将该区域作为清洁的起始点,再将清洁机器人移动至其他方格区域内,将该区域作为清洁机器人清洁后的回归点,起始点和回归点均在控制终端上设立;
11、步骤五、路径规划
12、根据设立的起始点以及标记好的障碍物,由控制终端规划出最优清扫路径,根据设立的回归点,再规划清扫路径终点到回归点的路径;
13、步骤六、路径避障
14、当规划路径上存在新障碍物时,进行避障,避障后回归到后续的清洁路径上。
15、进一步改进在于:所述步骤一中,采用导入房型图的方式,规划清扫区域的边界线。
16、进一步改进在于:所述步骤二中,清扫机器人以圆点的方式显示在区域网格地图上,且清扫机器人覆盖的方格数量为一组。
17、进一步改进在于:所述步骤三中,未能移动到的方格范围即为障碍物的范围,在区域网格地图内进行标记,而能移动到的范围则以空白的形式在控制终端上展示。
18、进一步改进在于:所述步骤四中,起始点和回归点处于同一方格区域或不同方格区域。
19、进一步改进在于:所述步骤五中,采用弓字型线路方式进行路径规划。
20、进一步改进在于:所述步骤六中,避障的策略为优先经过已清洁区域进行避障。
21、进一步改进在于:所述步骤六中,当该区域障碍连续存在n次后,控制终端将其标记为障碍物区域,然后重新进入步骤四中,在起始点和回归点不变的前提下,重新规划路线。
22、本发明的有益效果为:该种清洁机器人路径规划方法通过依据房型图的方式来构建清扫区域的地图,并对其网格化,划分为若干组小方格,再通过先覆盖一遍的方式,确定固定障碍物所涉及的范围之后,设立起点和回归点,再进行路径规划,由此通过将非固定障碍物的区域都移动一遍,即可使清洁机器人完成一次的清洁作业,大幅提升清洁机器人的清洁效率,同时随着房间数量的增加和减少,均可以在构建的地图上进行对应的增加和修改,即可在后续的路径规划上进行增加或者是减少,以此来保证清洁机器人的清洁效率,此外,后续在规划的路径上遇到障碍物时,先采取避障的策略,当连接多次在同一个区域遇到障碍物时,即将其标记为固定障碍物,后续会重新生成一个新的清洁路线,继而在出现其他障碍物时,可以自适应的调节,无需用户进行对应的调整,便于使用。
技术特征:
1.一种清洁机器人路径规划方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤一中,采用导入房型图的方式,规划清扫区域的边界线。
3.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤二中,清扫机器人以圆点的方式显示在区域网格地图上,且清扫机器人覆盖的方格数量为一组。
4.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤三中,未能移动到的方格范围即为障碍物的范围,在区域网格地图内进行标记,而能移动到的范围则以空白的形式在控制终端上展示。
5.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤四中,起始点和回归点处于同一方格区域或不同方格区域。
6.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤五中,采用弓字型线路方式进行路径规划。
7.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤六中,避障的策略为优先经过已清洁区域进行避障。
8.根据权利要求1所述的一种清洁机器人路径规划方法,其特征在于:所述步骤六中,当该区域障碍连续存在n次后,控制终端将其标记为障碍物区域,然后重新进入步骤四中,在起始点和回归点不变的前提下,重新规划路线。
技术总结
本发明提出一种清洁机器人路径规划方法,包括构建清扫区域地图边界、区域地图网格化、障碍物规划、起始点和回归点校准、路径规划和路径避障六个步骤,本发明通过依据房型图的方式来构建清扫区域的地图,并对其网格化,划分为若干组小方格,再通过先覆盖一遍的方式,确定固定障碍物所涉及的范围之后,设立起点和回归点,再进行路径规划,由此通过将非固定障碍物的区域都移动一遍,即可使清洁机器人完成一次的清洁作业,大幅提升清洁机器人的清洁效率,同时随着房间数量的增加和减少,均可以在构建的地图上进行对应的增加和修改,即可在后续的路径规划上进行增加或者是减少,以此来保证清洁机器人的清洁效率。
技术研发人员:董作峰,郝伟娜,董兰君,郝运佳
受保护的技术使用者:山西兰一科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!